 基于多傳感器信息融合技術的自主式移動機器人導航系統設計
基于多傳感器信息融合技術的自主式移動機器人導航系統設計
1 引言
自主式移動機器人(Autonomous Mobile Robot) 是一個對外界環境高度開放的智能系統,需要對各種復雜的外部環境作出實時感知和決策,控制運動機構完成各種駕駛動作,實現道路跟蹤和避障等功能。在自主式移動機器人的研究中,機器人的精確定位一直是研究的熱點問題。而光電導航系統就是機器人的一個“眼睛”,在其運動中起著非常重要的作用。
機器人的控制要求實時性、快速性、精確性。但傳統的控制方案對較要求復雜環境中的機器人控制具有局限性。而模糊控制響應快、超調小且魯棒性好,可以通過改變控制等級來調整系統的穩態誤差,已成為移動機器人導航的一種重要方法[2]。因此本文針對特定引導路徑下的移動機器人,給出了基于模糊控制信息融合方法的解決方案。將光電傳感器采用非線性分布,并將其采集的信息融合后,作為表格查詢的模糊控制方法的輸入,從而提高了該導航系統的可靠性和魯棒性。
2 導航系統的設計
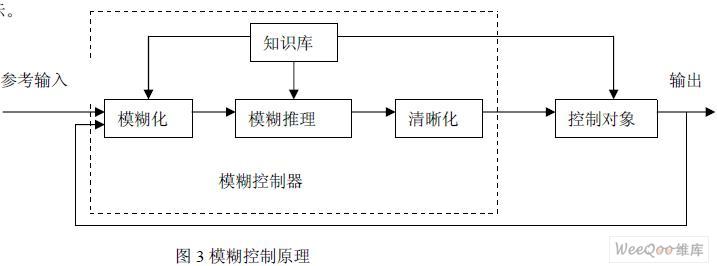
在機器人沿路徑引導線行駛的過程中,會出現車位中心線偏出的情況。為了保證自主式移動機器人能準確跟蹤路徑引導線,在機器人的車體下方安裝了三組光電傳感器。每個傳感器即為一個檢測點,其結構如圖1 所示。三組光電傳感器的安裝圖可參見圖2。使用一維傳感器的信息存在片面性,所以將傳感器分成了三排,利用多傳感器信息融合的技術,提高檢測數據的精確性和可靠性。
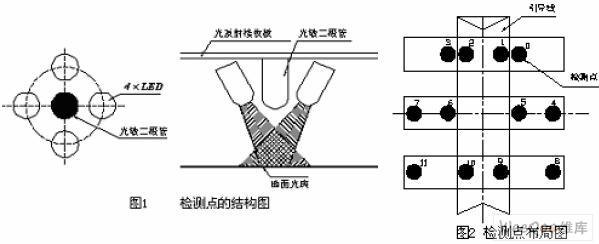
在機器人行走過程中,通過導航系統不斷檢測地面上的引導線的信息,檢測自身的位置狀態,通過光電傳感器所構成的檢測系統立即將檢測結果轉化為模擬信號,該信號經過放大、光電耦合隔離后,輸入到A/D 轉換通道,并與既定的閾值進行比較。當傳感器位于黑色引導線上時,輸出為高電平,數字信號為1;當其不在引導線上時,輸出為低電平,數字信號為0。將檢測點的結果融合后作為模糊控制器的輸入,機器人按照模糊控制表進行判斷調整。
3.模糊控制算法的設計
3.1 原理
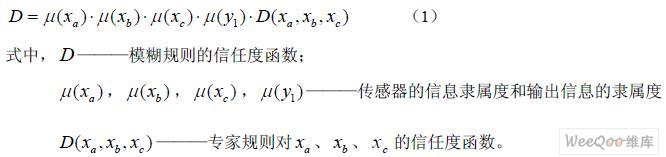
模糊控制是一種模仿人的控制方法,通過用一組語言描述的規則來表示專家的知識。其原理如圖3 所示。表格查詢學習算法是模糊控制實現的一種方法,它只需對輸入和輸出數據對和語言性模糊用“if-then”規則進行一步運算即可。這個方法的基本思想就是從輸入-輸出數據對中產生模糊規則,最終的模糊系統將從組合模糊規則中產生[5]。
3.2 算法的實現步驟
3.2.1 模糊知識庫的產生
由圖 3 可以看出,知識庫是模糊控制系統的核心,因此要確定模糊系統,獲取模糊知識(規則)是極其重要的。本文的表格查詢學習算法是通過輸入-輸出數據對的分析并結合專家經驗產生模糊規則,根據組合模糊規則進行模糊控制規則表格的設計,然后再在實驗中進行校驗。其方法具體如下:
第一步 將輸入-輸出空間劃分模糊區間
本文將光電檢測傳感器(如圖 2 所示)分成了三排,每排4 位為一個采集信號,這樣在采集過程中,傳感器的采集信號就為三個。輸出信號為機器人的位置,即輸出信號為一個。把這四個信號采集量模糊化。
對四個信號量的取值空間進行劃分,可分為7 個部分,分別為LB、LM、LS、CE、RS、RM、RB,即左大偏、左中偏、左小偏、中間、右小偏、右中偏、右大偏。通過機器人在線學習的方法,建立運動狀態數據庫,即通過機器人無調節行駛,由機器人自行對運動狀態進行采樣、儲存,建立運動當中的偏差與類型數據庫。通過記錄文件得出數據統計表1、表2 和表3。如表所示,一排四個傳感器,預設狀態為16 個,通過實際檢測,對狀態值進行濾波,即狀態出現次數小于所有狀態出現次數之和0.2%的狀態,定義為不可能狀態,表示為0;可能狀態表示為1。

第二步由已知的輸入-輸出數據對產生模糊規則
首先求出不同區間上四個信號xa 、xb 、xc 、y1 對應的隸屬度。其次將已知的四個信號xa 、xb 、xc、y1 數據分別定位于最大隸屬度對應的區間上。最后,從每一對比較滿意的輸入-輸出數據對中產生一條規則。如if xa is CE , xb is CE, xc is CE then y1 is CE. 用上述規則產生的是“邏輯與”規則,即在規則當中只有當if 部分的條件都同時滿足時,“then”部分的結果才會發生。
第三步 每一條規則賦予一個置信度
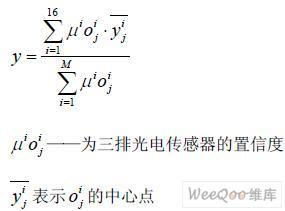
由于有許多數據信息,而每一對數據產生一條規則,這樣很可能會出現自相矛盾的規則,所以我們結合這些數據對的經驗信息,比如,讓一位專家來檢查所有的數據對,這個專家就可能看出哪些數據有用,哪些數據是關鍵性數據,哪些數據不太合理或有量測誤差產生。因此可以為每一對數據加一個信任度表示數據可靠性的相信程度。依據此方法建立的信任度函數如下所示:
第四步 組合模糊規則庫的產生
表 4 就是一個模糊規則庫,我們可以用以下的準則把模糊規則填入表中的空格:組合模糊規則庫中的規則于數據本身的規則,需附加一條專家的信任度以反映專家對規則可靠性的信任度,如果模糊規則庫中某一空格對應的規則不止一個,則選用具有最大置信度的那一條規則。每排傳感器的信息分為7 個,三排輸出狀態應為343 種。根據機器人實際運行的環境與特點,我們選其中的16 條規則建立規則庫。

第五步根據模糊規則確定映射關系。
利用下列中心平均解模糊公式就可以有輸入 xa、xb、xc,求出輸出量y:
3.2.2 根據模糊規則庫建立模糊控制表
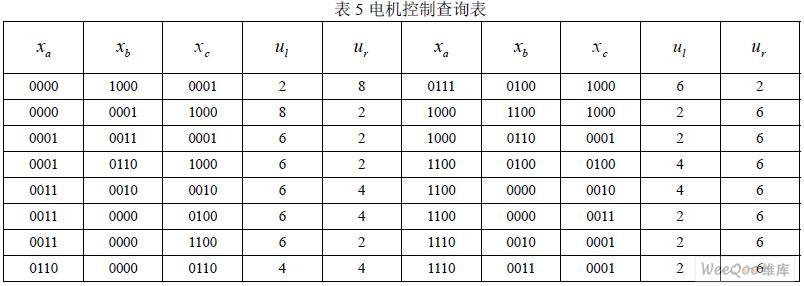
根據表 1、表2、表3 記錄的機器人運行過程中各排光電檢測傳感器的狀態,將速度等級劃分為2、4、6、8 四個等級,并通過大量的實驗,進行計算與修改,得到表5。u1 、ur分別為左、右輪的速度。當所有的光電傳感器的狀態均為0 時,在原地進行旋轉搜索。其余狀態,視為無偏,左、右輪速度均為4。
4. 實驗結果
依據表 5 實現自主式移動機器人系統的運動控制。使機器人在環形引導線上長期運行。實驗結果如圖4 所示。從圖中可以看出機器人能夠實現路徑跟蹤和自動糾偏的功能,而且在直線部分調整比較小。

5.結論
本文針對具有引導線環境下的路徑跟蹤這一熱點問題,提出了利用多傳感器信息融合技術,將所融合的信息作為模糊控制器的輸入,實現了機器人的路徑跟蹤和自動糾偏的功能。該導航系統已應用到“導游”機器人中,實際運行結果表明了本文所提出的導航系統具有很好的魯棒性和可靠性。
-
傳感器
+關注
關注
2551文章
51125瀏覽量
753760 -
機器人
+關注
關注
211文章
28437瀏覽量
207175 -
導航
+關注
關注
7文章
528瀏覽量
42416
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論