") 基于模糊PID控制的永磁同步電動(dòng)機(jī)控制系統(tǒng)設(shè)計(jì)與仿真分析
基于模糊PID控制的永磁同步電動(dòng)機(jī)控制系統(tǒng)設(shè)計(jì)與仿真分析
1 引言
永磁同步電機(jī)(PMSM)具有強(qiáng)耦合、參數(shù)時(shí)變、非線性等特點(diǎn),且系統(tǒng)運(yùn)行時(shí)受到不同程度的干擾,因此很難滿足現(xiàn)代工業(yè)對(duì)高性能PMSM伺服系統(tǒng)的控制要求,尤其在精度、可靠性等性能上。PMSM伺服系統(tǒng)是一個(gè)包含電流(轉(zhuǎn)矩)環(huán)、速度環(huán)和位置環(huán)的三閉環(huán)控制系統(tǒng)。采用矢量控制可改善系統(tǒng)內(nèi)部電流(轉(zhuǎn)矩)環(huán)的性能囝。位置環(huán)和速度環(huán)實(shí)現(xiàn)系統(tǒng)的精確定位和對(duì)輸入信號(hào)的快速跟蹤。速度控制器研究較多的控制策略有神經(jīng)網(wǎng)絡(luò)控制、滑模變結(jié)構(gòu)控制、多種控制策略的復(fù)合控制等。其算法都比較復(fù)雜,不利于電機(jī)數(shù)字化控制的實(shí)時(shí)性。模糊控制采用以系統(tǒng)誤差和誤差變化為輸入語(yǔ)句變量的二維模糊控制器結(jié)構(gòu)形式,能夠處理受控對(duì)象的不確定特性,具有實(shí)現(xiàn)方法簡(jiǎn)易、運(yùn)算快速、實(shí)時(shí)性強(qiáng)等特點(diǎn),系統(tǒng)能夠獲得良好的動(dòng)態(tài)特性.但靜態(tài)特性不能令人滿意。將模糊控制與PID控制相結(jié)合,設(shè)計(jì)模糊PID速度控制器,使系統(tǒng)既具有模糊控制靈活而適應(yīng)性強(qiáng)的優(yōu)點(diǎn),又具有PID控制精度高的特點(diǎn)。系統(tǒng)仿真及實(shí)驗(yàn)結(jié)果表明該控制策略具有良好的控制效果。
2 模糊PID控制器的設(shè)計(jì)
2.1 控制器結(jié)構(gòu)
設(shè)計(jì)應(yīng)用于速度環(huán)的模糊PID控制器采用廣泛應(yīng)用的二維模糊控制器,其一個(gè)輸入變量是電機(jī)輸出轉(zhuǎn)速反饋值與給定轉(zhuǎn)速間的誤差E。另一個(gè)輸入變量是轉(zhuǎn)速誤差的變化率EC,即單位時(shí)間內(nèi)轉(zhuǎn)速誤差的差值。輸出端設(shè)計(jì)為多輸出,由于模糊PID控制器是在傳統(tǒng)PID控制的基礎(chǔ)上加入了模糊控制,故只需在傳統(tǒng)PID調(diào)節(jié)參數(shù)的基礎(chǔ)上稍作修正即可,于是取傳統(tǒng)PID控制器的3個(gè)參數(shù)P,I,D的修正值△Kp,△Ki;△Kd作為模糊控制器的輸出。
2.2 確定隸屬度函數(shù)
記E,EC,△Kp,△Ki,△Kd的模糊變量為e,ec,kp,ki,kdo如模糊子集為(NB(負(fù)大),NM(負(fù)中),NS(負(fù)小),ZO(零),PS(正小),PM(正中),PB(正大)}。選擇輸入量e,ec隸屬度函數(shù)為高斯型。e的中間密以增加穩(wěn)態(tài)精度;輸出kp,ki,kd的隸屬度函數(shù)為三角形。
2.3 模糊控制規(guī)則的確定
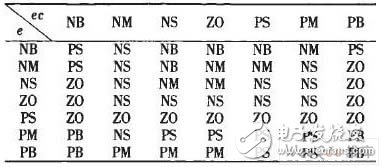
模糊控制規(guī)則由一系列關(guān)系詞連接而成。最常用的關(guān)系詞有if-then,also,or和and,根據(jù)應(yīng)用中的經(jīng)驗(yàn),確定各輸出量與輸入量的模糊控制規(guī)則分別如表1-3所示。模糊推理合成規(guī)則遵循極大-極小合成規(guī)則,并采用Mamdani型模糊推理算法。
表1 Kp模糊規(guī)則表
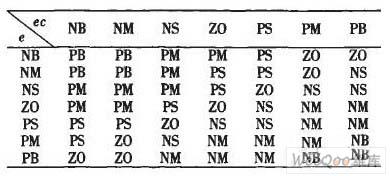
表2 Ki模糊規(guī)則表
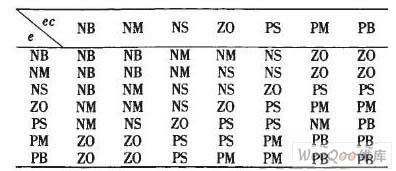
表3 Kd模糊規(guī)則表
2.4 確定輸出量的去模糊化方法
模糊控制算法給出的控制量(精確量),還不能直接控制對(duì)象,實(shí)際輸出需進(jìn)行去模糊化處理。將其轉(zhuǎn)換到控制對(duì)象所能接受的基本論域中去。去模糊化處理算法采用質(zhì)心法。
2.5 Matlab輔助模糊咖控制器的設(shè)計(jì)
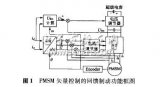
在Madab仿真系統(tǒng)中建立模糊控制器,然后與傳統(tǒng)的PID控制器結(jié)合,構(gòu)成模糊PID控制器。由于模糊控制器的輸入、輸出必須是模糊量,因此對(duì)輸入進(jìn)行模糊化。對(duì)于速度環(huán)PID控制器,取輸入量速度誤差和速度誤差變化率的基本論域?yàn)?[50,+50],[-500,+500],取Kp,Ki,Kd的基本論域?yàn)閇-0.2,0.2],[-0.1,0.1],[-0.01,0.01]。將模糊控制器和PID控制器連在一起,構(gòu)成模糊PID控制器。如圖1所示。
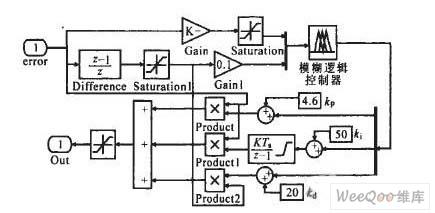
圖1 模糊PID仿真模塊
3 仿真結(jié)果與分析
在Matlab/Simulink環(huán)境下。建立PMSM伺服系統(tǒng)仿真模型,對(duì)速度環(huán)模糊PID控制器的模糊控制策略進(jìn)行仿真。電機(jī)參數(shù)為:額定功率75 kW,額定轉(zhuǎn)速2 000 r·min-1,定子電阻R=79.063 9 mΩ,交、直軸電感分別為L(zhǎng)d=2.206 mH,Lp=3.881 mH,轉(zhuǎn)動(dòng)慣量J=0.05 kg·m2,極對(duì)數(shù)p=4,額定轉(zhuǎn)矩Te=358 N·m,φ0=557.88mT。圖2a,b為所設(shè)計(jì)模糊PID控制器和經(jīng)典PID控制器下的電機(jī)轉(zhuǎn)速的階躍響應(yīng)。圖2c,d示出起動(dòng)帶負(fù)載T1=158N·m,速度n1=1000r·min-1,在t=0.04 S時(shí)刻負(fù)載突變?yōu)門2=358 N·m時(shí),電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩特性。對(duì)比可知模糊PID控制比常規(guī)PID控制的轉(zhuǎn)速響應(yīng)時(shí)間短,并且超調(diào)量明顯減小,在0.04 s負(fù)載發(fā)生波動(dòng)過(guò)程中,轉(zhuǎn)速能快速平穩(wěn)地穩(wěn)定為1 000r·min-1,改善了系統(tǒng)的抗干擾能力。
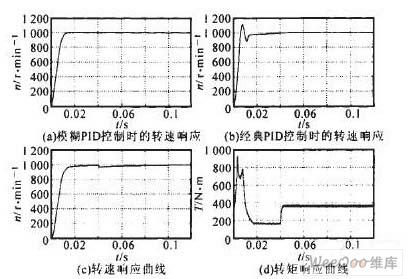
圖2 仿真波形
4 實(shí)驗(yàn)結(jié)果
圖3為電機(jī)在t0時(shí)刻帶負(fù)載啟動(dòng).從零加速到給定轉(zhuǎn)速800r·min-1,到t1時(shí)刻轉(zhuǎn)速和轉(zhuǎn)矩達(dá)到穩(wěn)定。在t2時(shí)刻突減負(fù)載的電機(jī)轉(zhuǎn)速和轉(zhuǎn)矩實(shí)驗(yàn)波形。可見(jiàn)電機(jī)在帶負(fù)載狀況下,轉(zhuǎn)速響應(yīng)速度很快,且基本無(wú)超調(diào)。當(dāng)負(fù)載突變時(shí),轉(zhuǎn)速在小范圍波動(dòng)后雖沒(méi)Matlab仿真理想,但仍快速穩(wěn)定在給定值。實(shí)驗(yàn)證明,系統(tǒng)具有很好的動(dòng)、靜態(tài)性能,從而驗(yàn)證了模糊PID控制器在轉(zhuǎn)速調(diào)節(jié)環(huán)節(jié)中的良好控制性能。
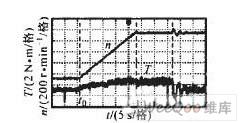
圖3 實(shí)驗(yàn)波形
5 結(jié)論
研究了基于模糊PID控制策略的永磁同步電動(dòng)機(jī)速度復(fù)合控制器。系統(tǒng)采用DSP為主控芯片,主回路由二極管全橋不控整流、電容平波及濾波電路、IGBT逆變輸出構(gòu)成。仿真和實(shí)驗(yàn)結(jié)果表明:所設(shè)計(jì)的復(fù)合控制器提高了系統(tǒng)的速度響應(yīng),使系統(tǒng)具有良好的動(dòng)靜態(tài)性能。滿足高精度伺服系統(tǒng)的需求。
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6635瀏覽量
110687 -
永磁同步電機(jī)
+關(guān)注
關(guān)注
28文章
873瀏覽量
49599 -
電動(dòng)機(jī)
+關(guān)注
關(guān)注
75文章
4115瀏覽量
96631 -
PID
+關(guān)注
關(guān)注
35文章
1472瀏覽量
85611
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
永磁同步電動(dòng)機(jī)的分類和特點(diǎn)
永磁同步電動(dòng)機(jī)的發(fā)展趨勢(shì)如何?
【下載】《永磁同步電動(dòng)機(jī)直接轉(zhuǎn)矩控制系統(tǒng)》胡育文 ——介紹三類PMSM直接轉(zhuǎn)矩控制技術(shù)
自控式同步電動(dòng)機(jī)
永磁同步電動(dòng)機(jī)的組成部分
永磁同步電動(dòng)機(jī)無(wú)位置傳感器直接轉(zhuǎn)矩控制仿真研究
基于矢量控制的永磁同步電動(dòng)機(jī)回饋制動(dòng)仿真
基于模糊PID的永磁同步電動(dòng)機(jī)數(shù)字控制系統(tǒng)
基于SVPWM的永磁同步電動(dòng)機(jī)控制系統(tǒng)仿真與實(shí)驗(yàn)研究
基于SVPWM的永磁同步電動(dòng)機(jī)控制系統(tǒng)設(shè)計(jì)
基于永磁同步電動(dòng)機(jī)的混沌運(yùn)動(dòng)控制分析
全永磁同步電動(dòng)機(jī)變頻調(diào)速系統(tǒng)及其控制pdf下載
采用Matlab/Simulink軟件實(shí)現(xiàn)永磁同步電動(dòng)機(jī)控制系統(tǒng)的建模與仿真





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論