") 如何為ISA設(shè)備編寫WDM驅(qū)動程序
如何為ISA設(shè)備編寫WDM驅(qū)動程序
WDM(Windows Driver Mode1)是Microsoft公司全新的Windows驅(qū)動程序模式,支持即插即用(PNP)、電源管理和WMI技術(shù),它的運行平臺是Windows 98/2000/XP/2003操作系統(tǒng)。這種具有跨平臺性的設(shè)備驅(qū)動模型可以大大簡化驅(qū)動程序的開發(fā)工作,為用戶的PNP設(shè)備驅(qū)動完成了大量的底層工作。這也使得WDM對各種老設(shè)備,特別是那些不具有即插即用特性硬件的支持明顯的不足。在科研和工控中,最常用的數(shù)據(jù)采集卡通常都是基于PC總線的不能為PNP提供硬件支持的ISA設(shè)備。為這類硬件編寫非WDM驅(qū)動程序只能局部支持PNP特性,而且需要做大量額外的工作如:必須檢測硬件,為硬件創(chuàng)建設(shè)備對象(用于代表硬件),配置并初始化硬件使其正常工作,這些工作非常復(fù)雜。利用WDM可以大大簡化這些工作。
1 WDM的結(jié)構(gòu)
WDM實際上是一個編寫驅(qū)動程序的規(guī)范。其驅(qū)動程序結(jié)構(gòu)的特點和WINDOWS程序設(shè)計的消息驅(qū)動機制很相像,采用IRP驅(qū)動機制。WINDOWS 98和WINDOWS 2000處理IRP的方式一樣,本質(zhì)卻完全不同。
Windows2000的內(nèi)存管理采用了虛擬內(nèi)存的概念,系統(tǒng)表現(xiàn)為具有一個比物理內(nèi)存大得多的虛擬內(nèi)存空間。每個進程都被賦予它自己的虛擬地址空間,這個地址空間劃分成固定大小的頁(x86、32位處理器的頁大小為4KB),一個頁可以駐留在物理內(nèi)存(非分頁內(nèi)存),或者被交換到硬盤上(分頁內(nèi)存)。當(dāng)進程中的一個線程正在運行時,該線程可以訪問只屬于它的進程的內(nèi)存,屬于所有其他進程的內(nèi)存則隱藏著,并且不能被正在運行的線程訪問。每個進程有獨立的內(nèi)存空間,不會被其他程序訪問,保護了數(shù)據(jù)的完整性。這樣,有一部分內(nèi)存實際上不是在物理內(nèi)存中,而是在硬盤上。當(dāng)訪問并不存在于實際物理內(nèi)存的地址時,內(nèi)存管理器引發(fā)DISPATCH_ LEVEL級別的頁故障中斷,調(diào)用硬盤驅(qū)動程序把故障頁讀入內(nèi)存。所以,在DISPATCH LEVEL級別上運行代碼時,訪問非分頁內(nèi)存是一個基本原則,否則進程將被阻塞,因為這個頁故障中斷被屏蔽了。這時,在當(dāng)前的Windows系統(tǒng)中,就會發(fā)生藍屏。虛擬內(nèi)存方便了應(yīng)用程序l的開發(fā),卻給ISA設(shè)備在分配資源時帶來一些復(fù)雜的問題。因為x86處理器的內(nèi)存頁大小為4KB,所以在為ISA設(shè)備進行內(nèi)存映射時每段就不要超過4KB。否則當(dāng)訪問超出4KB地內(nèi)存時就會出現(xiàn)上面所說的藍屏。
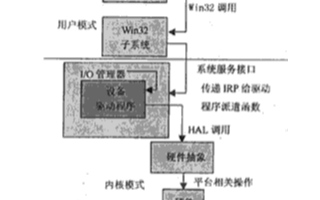
WDM驅(qū)動程序面對的主要內(nèi)容是一系列內(nèi)核驅(qū)動對象。這些對象包括驅(qū)動對象、設(shè)備對象,還有一系列的資源抽象對象如中斷對象、適配器對象(處理DMA操作)、內(nèi)核模式派發(fā)器對象、控制器對象、推遲過程對象、定時器對象、設(shè)備隊列對象、回調(diào)對象等。其中驅(qū)動對象由I/O管理器負(fù)責(zé)創(chuàng)建和管理。WDM驅(qū)動程序利用IRP和這些對象完成硬件設(shè)備的抽象化,并對應(yīng)用程序提供統(tǒng)一操作接口。這就是所謂的WDM規(guī)范。
WDM驅(qū)動程序的結(jié)構(gòu)很簡單。它的主體是一個入口函數(shù)DriverEntry。DriverEntry的第一個參數(shù)是指針,指向一個剛被初始化的驅(qū)動程序?qū)ο螅搶ο蟠眚?qū)動程序。WDM驅(qū)動程序的DriverEntry例程完成這個對象的初始化并返回。WDM驅(qū)動程序的DriverEntry例程的主要工作是把各種函數(shù)指針填入驅(qū)動程序?qū)ο蟆_@些指針對操作系統(tǒng)指明了驅(qū)動程序容器中各種子例程的位置。它包括下面這些指針成員:
·DriverUnload指向驅(qū)動程序的清除例程。I/O管理器會在卸載驅(qū)動程序前調(diào)用該例程。通常WDM驅(qū)動程序的DriverEntry例程一般不分配任何資源,所以DriverUnload例程也沒有什么清除工作要做。
·DriverStartIo,如果驅(qū)動程序使用標(biāo)準(zhǔn)的串行IRP,則必須使用這個函數(shù),使它指向驅(qū)動程序的StarIo例程。
·MajorFunction是一個指針數(shù)組,它主要處理各種用戶的I/O請求IRP。默認(rèn)情總況下,用戶的所有I/O請求都會由I/O管理器返回失敗。驅(qū)動程序為要處理的IRP指定相應(yīng)的派遣函數(shù)。
2 為ISA設(shè)備分配資源
雖然WDM驅(qū)動程序可以簡化很多工作,但是給ISA設(shè)備編寫WDM驅(qū)動程序也有困難。這個困難是ISA設(shè)備所需資源的分配問題。根據(jù)PNP的規(guī)范,支持PNP的設(shè)備如PCI總線設(shè)備有相應(yīng)的寄存器標(biāo)識自己和自己可以接受的資源,如中斷、端口范圍、內(nèi)存范圍等,并且有相應(yīng)的邏輯支持配置資源。這使得操作系統(tǒng)啟動過程中可以動態(tài)地規(guī)劃調(diào)整各個設(shè)備的資源而不需要用戶的干預(yù)。為了兼容非PNP設(shè)備,INF文件支持幾個命令為設(shè)備分配資源。這些信息初提供給NPN管理器,并且被PNP管理器用來與系統(tǒng)其它部分協(xié)商以完成非PNP設(shè)備的自動資源分配。LOGCONFIG為設(shè)備制定一個可選的資源設(shè)定。還有相應(yīng)的IRQCONFIG、IOCONFIG、DMACONFIG、MEMCONFIG子命令,它們?yōu)樵O(shè)備指定具體的可選資源。語法如下:
ConfigPririty=
[DMAConfig=]
[IOConfig=
[IRQConfig=]
[MemConfig=]
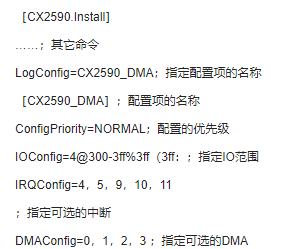
其中CONFIGPRIOITY命令指定這個LOGCONFIG項的優(yōu)先級。其余子命令表示設(shè)備選用的硬件資源。下面是一個例子:
[CX2590.Install]
……;其它命令
LogConfig=CX2590_DMA;指定配置項的名稱
[CX2590_DMA];配置項的名稱
ConfigPriority=NORMAL;配置的優(yōu)先級
IOConfig=4@300-3ff%3ff(3ff::);指定IO范圍
IRQConfig=4,5,9,10,11 ;指定可選的中斷
DMAConfig=0,1,2,3 ;指定可選的DMA
在INF文件中加入LOGCONFIG命令可以解決ISA總線設(shè)備資源的自動分配問題,就可以為ISA總線設(shè)備編寫WDM驅(qū)動程序。
3 一個ISA設(shè)備WDM驅(qū)動程序的實現(xiàn)
使用Numega公司的開發(fā)工具DriverStudio 2.01可以大大地簡化驅(qū)動程序的開發(fā)過程。DriverStudio開發(fā)通用內(nèi)核模式的開發(fā)包是DriverWorks。DriverWorks是一個面向?qū)ο蟮墓ぞ甙K庋b了比較底層的繁復(fù)操作,提供給開發(fā)者一個簡潔的界面。同時,DriverWorks和Visual C++有很多的接口:DriverWorks專門為Visual C++提供了一個專門開發(fā)WDM驅(qū)動程序的WIZARD。在WIZARD指導(dǎo)下,開發(fā)者可以很容易地生成一個驅(qū)動程序的框架。開發(fā)者要作的工作就是根據(jù)特定硬件編寫相應(yīng)的代碼。
開發(fā)的高速旋轉(zhuǎn)機械監(jiān)控與故障診斷系統(tǒng)采用的是北京大恒公司的具有FIFO(隊列形式實現(xiàn)的緩存)的8路數(shù)據(jù)采集卡AC 1810。它的特點是由硬件自動完成采用操作:當(dāng)FIFO半滿的時候,系統(tǒng)產(chǎn)生中斷通知用戶取走數(shù)據(jù);同時,硬件繼續(xù)自動采樣FIFO的另一關(guān)。驅(qū)動程序的主要工作包括設(shè)備I/O讀操作和中斷服務(wù)操作。下面是WIZARD生成的驅(qū)動對換和設(shè)備對象的定義(只取主要部分):
// 驅(qū)動對象
class AC_1810 : public Kdriver
{
SAFE_DESTRUCTORS
public:
virtual NTSTATUS
DriverEntry(PUNICOE-STRING
RegistryPath);
//驅(qū)動程序的入口函數(shù)
virtual NTSTATUS
AddDevice(PDEVICE_OBJECT Pdo);
//完成設(shè)備對象和驅(qū)動對象的連接
……
};
//設(shè)備對象
class AC_1810Device : public KpnpDevice
{
// Constructors
public;
AC-1810Device(PDEVICE_OBJECT Pdo,
ULONG Unit);//構(gòu)造函數(shù)完成資源配置
……
public:
AC_1810Device(PDEVICE_OBJECT Pdo,
ULONG Unit);//構(gòu)造函數(shù)完成資源配置
……
public:
BOOLEAN Isr_Irq(void);// IRQ中斷服務(wù)例程
Virtual NTSTATUS Create(KIrp I);
//標(biāo)準(zhǔn)IRP處理函數(shù)
virtual NTSTATUS Close(KIrp I);
// COMMENT_ONLY
virtual NTSTATUS Read(KIrp I);
// COMMENT_ONLY
virtual VOID StarIo(KIrp I);
// 開始I/O傳輸
VOID CancelQueuedIrp(KIrp I);
// 判斷傳輸IPR是否被取消
VOID Invalidate(void);
// 釋放資源例程
virtual NTSTATUS DefaultPnp(KIrp I);
// 處理默認(rèn)的PNP操作
virtual NTSTATUS DefaultPower(KIrp I);
// 管理電源
void SerialRead(KIrp I);
//完成實際的I/O操作
NTSTATUS IOCTL_SETUP_Handler(KIrp I);
//采樣參數(shù)設(shè)定
NTSTATUS IOCTL_REW_Handler(KIrp I);
// 開始/停止采樣
……
protected:
KioRange m_IoPotrRange0
// 管理I/O資源
Kinterrupt m_Irq;
// 管理中斷資源
……
};
在實際操作過程中,采用中斷讀數(shù)的方法。在驅(qū)動程序中設(shè)置了兩個緩沖區(qū),一個前臺緩沖區(qū),一個后臺緩沖區(qū)(用作后備緩沖區(qū)),系統(tǒng)總是先使用前臺緩沖區(qū)。這樣可以保證采樣數(shù)據(jù)序列的時間順序。
具體實現(xiàn)如下:
// ISR例程,完成數(shù)據(jù)從FIFO中讀出
BOOLEAN AC_1810Device::Isr_Irq(void)
{
//是否觸發(fā)不斷?未觸發(fā)則返回,判斷兩個緩沖區(qū)情況,都滿則返回
……
// 前臺緩沖區(qū)未滿,使用前臺緩沖區(qū)
if(m_pBuffer->numused < MAX_READ_BUF){
for(int i=0;i
m_pBuffer_>buff[m_pBuffer->numused+i]=READ_FIFO;
}
m_pBuffer->numused +=BLOCK_SIZE;
}
else
//完成其它情況的判斷
……
return TRUE;// 中斷成功返回
}
當(dāng)應(yīng)用程序使用標(biāo)準(zhǔn)Win32 API對設(shè)備進行讀操作的時候,I/O管理器通知驅(qū)動程序并觸發(fā)對Read函數(shù)的調(diào)用。對于通常的串行設(shè)備,在Read函數(shù)的最后排隊IRP請求,此時系統(tǒng)就可以觸發(fā)StartIO例程,并且保證這個過程是串行處理的。
// 讀例程,處理IRP_MJ_READ
NTSTATUS AC_1810 Device::Read(KIrp I)
{
// 檢查輸入的合法性
if (I.ReadSize ()
// 不合法返回錯誤代碼
I.Information()=0;
Return I.PnpComplete(this,STATUS_INVALID_PARAMETER);
}
// 讀0字節(jié),永遠成功
if (I.ReadSize() = =0){
I.Information () = 0;
return
I.PnpComplete(this,STATUS_SUCCESS);
}
// 排隊這個IRP觸發(fā)StarIO,完成數(shù)據(jù)傳輸
return QueueIrp(I,LinkTo(CancelQueuedIrp));
}
// StartIo例程,完成I/O操作
VOID AC_1810 Device::StartIo(KIrp I)
{
// 檢測這個IRP是否被取消
if(!I.TestAndSetCancelRoutine(LinkTo(CancelQueuedIrp),NULL,CurrentIrp()) )
{
return;//取消則返回
}
switch (I.MajorFunction()) {
case IRP_MJ_READ:
//這個函數(shù)按邏輯完成讀操作
SerialRead(I);
Breadk
……
// 開始處理下一個IRP
PnpNextIrp(I);
break;
}
}
ISA卡的WDM驅(qū)動程序的主體部分就完成了。它具有PNP功能,可以方便地安裝卸載。在中斷到來的時候,系統(tǒng)使用兩個緩沖區(qū)完成數(shù)據(jù)的傳輸,可以避免數(shù)據(jù)丟失。
以上驅(qū)動程序是使用Numega公司的DriverSutdio 2.01版,結(jié)合Visual C++ 6.0,Microsoft Windows 2000 sp1 DDk開發(fā)調(diào)試通過,并且成功地應(yīng)用到實驗室開發(fā)的高速旋轉(zhuǎn)機械實時狀態(tài)監(jiān)控與故障診斷系統(tǒng)中,該系統(tǒng)界面友好高度可靠。同時由于加入了PNP的支持,使得該系統(tǒng)的硬件安裝卸載非常簡便。這種技術(shù)可取代傳統(tǒng)的以DOS為核心的工業(yè)用監(jiān)控與故障診斷系統(tǒng),具有廣闊的應(yīng)用前景。
-
內(nèi)存
+關(guān)注
關(guān)注
8文章
3040瀏覽量
74167 -
定時器
+關(guān)注
關(guān)注
23文章
3253瀏覽量
115063 -
驅(qū)動程序
+關(guān)注
關(guān)注
19文章
840瀏覽量
48102
發(fā)布評論請先 登錄
相關(guān)推薦
WDM設(shè)備驅(qū)動程序開發(fā),Windows 2000/XP WD
實時系統(tǒng)VxWorks下設(shè)備驅(qū)動程序的編寫詳解
Windows 2000/XP下I/O設(shè)備驅(qū)動程序的設(shè)計
IEEE 1394設(shè)備的WDM驅(qū)動程序設(shè)計
WDM設(shè)備驅(qū)動程序開發(fā)中的若干問題
USB設(shè)備的WDM驅(qū)動程序設(shè)計
Windows設(shè)備驅(qū)動程序編寫時的主要問題及解決方案
PCI設(shè)備的WDM驅(qū)動程序開發(fā)
Linux設(shè)備驅(qū)動程序的編寫
Windows WDM設(shè)備驅(qū)動程序開發(fā)指南

Windows 2000下WDM驅(qū)動程序的研究與開發(fā)
Linux系統(tǒng)網(wǎng)絡(luò)驅(qū)動程序的編寫
如何為Linux編寫用戶空間設(shè)備驅(qū)動程序
基于WDM驅(qū)動程序模型實現(xiàn)過濾器驅(qū)動程序的開發(fā)設(shè)計
老式ISA設(shè)備的WDM驅(qū)動程序的開發(fā)與實現(xiàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論