") 采用激光測距和超聲波測距相結(jié)合的汽車防碰撞系統(tǒng)設(shè)計
采用激光測距和超聲波測距相結(jié)合的汽車防碰撞系統(tǒng)設(shè)計
1.引言
隨著汽車技術(shù)的不斷進步,尤其是自動駕駛技術(shù)的發(fā)展,越來越多的距離檢測設(shè)備將會不斷面世。目前,運用于汽車測距主要有以下四種方式:毫米波雷達測距方式;攝像系統(tǒng)測距方式;激光測距方式;超聲波測距方式。毫米波雷達存在電磁波相互干擾問題,攝像系統(tǒng)則造價高昂,均難以在汽車上普及。激光測距具有測量時間短、量程大、精度高等優(yōu)點,適應(yīng)汽車從低速前進到高速前進的測距需求,避免汽車高速行駛時因測距速度慢造成的測距失準現(xiàn)象。超聲波測距原理簡單,制作方便,成本比較低,但其只適用于較短距離低速測距,故將其應(yīng)用于汽車倒車時測距。本文提出的將激光測距和超聲波測距相結(jié)合的安全報警系統(tǒng),旨在幫助駕駛員在汽車多種行駛狀況、多方位探知并顯示車輛與周圍障礙物的距離,當障礙物距離小于設(shè)定安全距離時給駕駛員警報,避免駕駛員反應(yīng)不及時引發(fā)交通事故。
2.防碰撞系統(tǒng)的方案設(shè)計
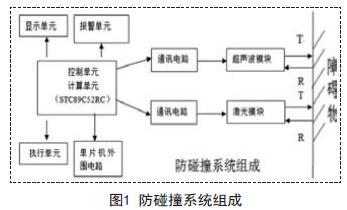
實現(xiàn)汽車防碰撞,關(guān)鍵還在于測距防碰撞系統(tǒng)的應(yīng)用。本系統(tǒng)由測距模塊、控制計算單元、顯示單元、報警單元、執(zhí)行單元等組成。其中測距模塊包括汽車前進時工作的激光測距模塊和汽車倒車時工作的超聲波測距模塊。兩者分別通過各自的通訊電路與控制單元相連,可在汽車前進后退等多種工況對汽車周邊障礙物進行全方位監(jiān)測,并把汽車與障礙物距離傳遞至控制單元,控制單元通過連接的執(zhí)行單元,報警單元等進行聲光報警,主動制動等防碰撞功能的執(zhí)行。系統(tǒng)組成如圖1所示。
3.測距原理
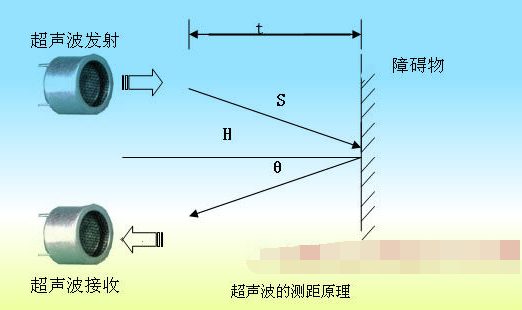
超聲波測距的原理是脈沖反射式,即利用其反射特性來工作。原理如圖2所示。
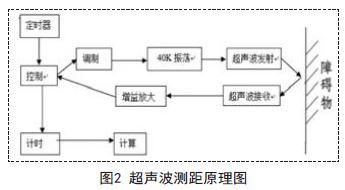
通過超聲波發(fā)射器向某一方向發(fā)射超聲波,在發(fā)射的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時。超聲波在空氣中的傳播速度為C,而根據(jù)計時器測出發(fā)射和接收回波的時間差t,就可以計算出發(fā)射點距障礙物的距離S,即:S=Ct/2.
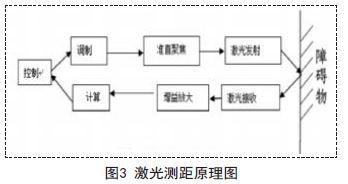
激光測距的原理(原理圖如圖3所示)與超聲波測距原理不同,利用的是三角法測距。
發(fā)射器向前發(fā)射脈沖,碰到障礙物后反射回來的回波被接收器接收,回波的圖像通過透鏡匯聚到傳感器上形成像點。當激光照射的物體移動時,像點也在傳感器上移動,在基線長度已知、光源和傳感器及透鏡的相對位置確定的前提下,通過測量傳感器上像點的位置就能準確確定被測物體與儀器之間的距離。
4.系統(tǒng)硬件及其運行
控制與計算單元的主體采用STC89C52RC單片機,該單片機是STC公司生產(chǎn)的一種帶8K字節(jié)閃爍可編程可檫除只讀存儲器的低電壓、高性能COMOS8的微處理器。
擁有靈巧的8位CPU和在系統(tǒng)可編程Flash,能夠為眾多嵌入式控制應(yīng)用系統(tǒng)提供高靈活、超有效的解決方案。蜂鳴器和led燈組成報警單元,能夠及時進行聲光報警。
此外,本系統(tǒng)采用深圳盈勤科技有限公司生產(chǎn)的REALWAVE SRF020M01A激光距離傳感器。該傳感器采用高性能專用芯片設(shè)計而成,精度高穩(wěn)定性好。單次測距輸入指令為“a/A”,返回數(shù)據(jù)通過幀的方式包裝發(fā)送。超聲波傳感器則采用市面常用的傳感器。
汽車前進時,車速較高,除超聲波模塊部分系統(tǒng)全部開始工作。控制單元(單片機)通過RS232串行通訊電路向激光測距模塊發(fā)送測距命令(“a/A”),控制激光測距模塊向前發(fā)射光脈沖,模塊接收到遇到障礙物反射回來的激光脈沖后分析計算汽車與障礙物距離,并通過RS232通訊電路將數(shù)據(jù)以16進制數(shù)包裝發(fā)送給單片機,具體數(shù)值為“ee+06+* * * *+cc”,ee為幀頭,cc為幀尾,第3個*表示16進制的測量結(jié)果。
單片機轉(zhuǎn)化為10進制后使顯示電路動態(tài)顯示障礙物距離S,同時判斷如S小于設(shè)定門限值K,則使報警單元的紅色LED燈持續(xù)閃爍,蜂鳴器連續(xù)長鳴報警,提醒駕駛員及時采取防碰撞措施。一定時間后駕駛員仍未采取有效措施時,單片機使執(zhí)行單元緊急制動剎車,主動避免發(fā)生碰撞。
汽車倒車時,車速較低,超聲波模塊代替激光測距模塊工作。在單片機IO口大于10US的高電平信號控制下,自動向后發(fā)射8個40KHZ的方波。
超聲波返回后單片機由INT0引腳高電平持續(xù)時間測得超聲波往返時間,通過換算得到汽車與障礙物之間的距離。之后利用系統(tǒng)的各個單元實現(xiàn)與激光測距相同的防碰撞工作。
5.系統(tǒng)軟件設(shè)計
圖4為超聲波測距軟件設(shè)計,系統(tǒng)啟動后,超聲波模塊向后發(fā)射超聲波,接收超聲波的同時開啟定時器定時,由測量到的時間T計算得到障礙物距離S,顯示單元動態(tài)顯示連續(xù)變化的距離S.如果距離S小于設(shè)定的門限值,則系統(tǒng)進行聲光報警,LED燈不斷閃亮,蜂鳴器持續(xù)鳴響,提醒駕駛員及時采取措施避免碰撞。延時1秒后如果距離S仍小于設(shè)定的門限值,表明駕駛員未進行任何有效操作,故系統(tǒng)控制汽車緊急制動,主動避免防碰撞的發(fā)生。
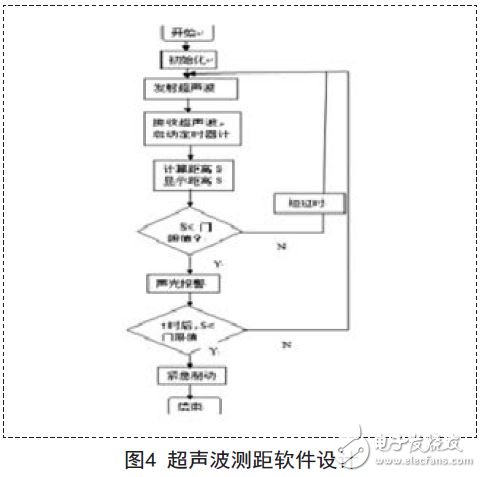
圖5為激光測距軟件設(shè)計,激光模塊發(fā)射接收激光脈沖后,由模塊內(nèi)部電路同時完成計算距離S工作。如果S小于門限值則進行報警。
6.結(jié)論
系統(tǒng)選用了激光測距傳感器和超聲波測距傳感器相結(jié)合的組合式測距方式。
單一傳感器的測距方式受傳感器的應(yīng)用條件限制較大,難以滿足汽車復雜的行駛狀態(tài)和多變的外部環(huán)境,故本系統(tǒng)的優(yōu)點顯而易見。在汽車前進,倒車,低速,高速等多種行駛狀態(tài),本系統(tǒng)均能對汽車周圍環(huán)境的障礙物進行有效的監(jiān)測和測距,使汽車主動進行防碰撞,防止交通事故的發(fā)生,具有廣闊的研究前景。
-
激光
+關(guān)注
關(guān)注
19文章
3235瀏覽量
64656 -
汽車電子
+關(guān)注
關(guān)注
3027文章
7992瀏覽量
167445 -
超聲波
+關(guān)注
關(guān)注
63文章
3029瀏覽量
138513
發(fā)布評論請先 登錄
相關(guān)推薦
畢業(yè)設(shè)計競賽選題推薦 | 鴻蒙物聯(lián)網(wǎng)應(yīng)用之智能測距儀項目實戰(zhàn)(含文檔及源碼)
【CW32模塊使用】US-016超聲波測距傳感器

E3F-DS30C4紅外線漫反射光電開關(guān)和超聲波測距的區(qū)別
RK3568教學實驗箱_操作案例:5-19 超聲波測距實驗
電應(yīng)普傳感器?|?窖井水位監(jiān)測超聲波傳感器應(yīng)用方案

雷達探測障礙物是超聲波還是次聲波
第七章-V1.5 STM32超聲波測距STM32F103C8t6超聲波避障小車 超聲波避障模塊 STM32超聲波測距

在全志H616核桃派開發(fā)板上實現(xiàn)超聲波傳感器測距
基于51單片機的車輛倒車雷達報警系統(tǒng),HC-SR04超聲波測距,全套資料
超聲波傳感器的工作原理 超聲波傳感器的聲波頻率是多少
什么是超聲波定位技術(shù)?功率放大器在超聲波定位中有何應(yīng)用?
超聲波傳感器和超聲波測距原理分析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論