 在電路設計中驅動器與接收器的選擇解決方案
在電路設計中驅動器與接收器的選擇解決方案
大多數電子系統的核心是一個用于處理數字輸入以產生增值輸出的處理器。選擇合適的處理解決方案常常是系統決策的第一步。
緊隨處理器選擇之后的是選擇正確的驅動器與接收器。本文著重介紹選擇這些器件時的考慮因素。
要求規范
在選擇一種處理器時,人們常常關心的是時鐘速度、存儲器及MIPS。但對于驅動器與接收器來說,還必須規定拓撲、信號傳輸速率與距離、以及功耗與互換性。
拓撲是指互連的節點數量。大多數基本拓撲都是包括一個驅動器與一個接收器的點對點(單工)拓撲。由于驅動器與接收器之間的路徑不復雜,因此單工可提供最高的信號質量。設計者常常用帶單工接口的時鐘分配樹來提高信號完整性。當接口速率高于數百Mbps時,單工架構也是一種較好的選擇。RS-232及 LVDS (TIA/EIA-644) 即為單工標準。
多路及多點為復雜程度更高的驅動器/接收器拓撲。多路是指一個驅動器與多個接收器通信。超過一個接收器時需采用主總線分出的抽頭。這些抽頭會產生不連續,從而使信號質量下降。LVDS (TIA/EIA-644-A) 最近經過改進后可支持多路工作。
多點架構擁有多個與一個(或多個)接收器相連的驅動器。當總線上有多個節點需要成為活動發射器時,即選擇多點架構。工控應用可能擁有互連的多個電機、傳感器與處理器,需要共享速度、位置及溫度信息以便處理器發出正確的扭矩與位置命令。RS-485及M-LVDS即為兩項多點工業標準。
規定拓撲后,即必須規定信號傳輸速度。時鐘信號以MHz表示,而數據傳輸則以Mbps表示。乘以2即可將以MHz表示的時鐘速度轉換成以Mbps表示的數據傳輸速率。
傳輸距離是另一項重要參數。很多驅動器與接收器都專門針對短距離應用而設計。這些限制源自于所采用的信號傳輸(單端比差分)、電壓電平與接收器的共模電壓范圍。
信號傳輸速率與傳輸距離之間存在著倒數關系。對于大多數器件來說,信號傳輸速率會隨距離增加而減小。這種倒數關系是由于存在符號間干擾 (ISI)。電纜及其腐蝕會濾掉從驅動器出來的信號的陡峭邊緣,從而導致在線的另一端引起干擾的單獨位脈沖。這種ISI可量化為抖動。抖動幅度隨距離增加而增加。假設可接受抖動的幅度恒定(以位周期的百分比表示),則很容易了解這種倒數關系。
其他需考慮的參數包括功耗與互換性。需要規定器件在加載條件下所消耗的電流。當有替代解決方案時,通常選擇功耗較低的解決方案。互換性是指標準器件以及公共占板面積或引腳。標準器件通常優于專用解決方案。標準接口允許設計不同的子系統,并能進行平滑集成。標準器件與公共占板面積可確保原有器件與替代器件的互換性。
器件選擇
可用驅動器與接收器的選擇相當困難。但幸運的是,可迅速縮小可行解決方案的范圍。首先采用拓撲,必須了解,單工、多路及多點器件代表著更高的可用性,故可在單工或多路應用中使用多路器件。反之未必正確,雖然也可用多點器件來解決單工、多路及多點問題,但此時須考慮最大信號傳輸速率。試圖實現一種Gbps的多路系統將很可能失敗。多路與多點設計通常會限制在數百Mbps數據速率上。
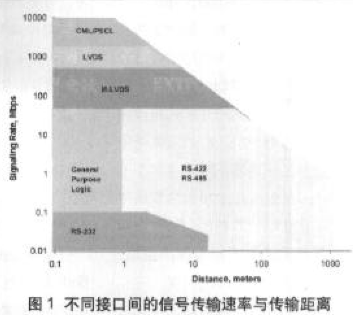
在多種替代器件間進行選擇時,必須同時最佳地考慮信號傳輸速率與傳輸距離。圖1顯示不同器件的信號傳輸速率與傳輸距離。如圖1所示,信號傳輸速率隨距離增加而減小。從左下角開始,通用、單端邏輯(BTL、GTL及GTLP)可以高達50 Mbps的速率提供小于1米的覆蓋距離。當傳輸距離較長時,則需要使用更為穩健的驅動器。對于速率小于100 Kbps及距離長達20米的數據傳輸,可采用RS-232器件。RS-232器件為單端輸入并采用大電壓擺幅,因而可獲得更高的傳輸功率。
當設計要求傳輸距離大于1米及傳輸速率高于100 Kbps時,需采用差分信號。要想使單端信號速率大于100 Kbps,則需要有很陡的驅動器斜率。差分信號具有內在的噪聲抑制(由于接收器共模噪聲抑制),因此允許有更小的電壓擺幅。RS-422(多路)及RS-485(多點)可以50 Mbps的速率工作,并能在更低的速率上達到大于1公里的傳輸距離。如果要求有更高的傳輸速率,可使LVDS器件在數Gbps速率上工作。LVDS采用小差分信號,這種信號允許進行更快的開關,但將傳輸距離限制在數十米以內。LVDS的變體——M-LVDS,可提供高達500 Mbps的數據速率,并將LVDS的適用范圍擴展至多點及重負載背板。
隨著傳輸速率超過2 Gbps,可用解決方案包括PECL及CML器件。這些器件繼續確立了高速信號傳輸的標準,但要求有更高的負載電流。
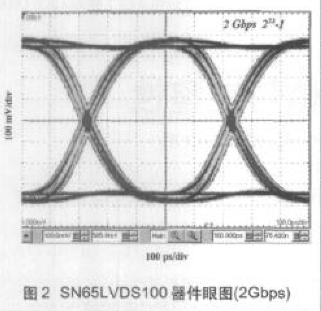
最后請注意圖1中的幾點。首先,可使用速度較高及傳輸距離較遠的器件來解決低速率及短距離問題。可將LVDS解決方案用于在背板4英寸范圍內分配1 MHz的時鐘——正如RS-422或RS-485一樣。LVDS解決方案較低的電磁輻射常使其成為解決這種問題的首選方案。在考慮器件信號傳輸速率時,重要的是須注意,最大信號傳輸速率可能需要根據最小可接受參數質量(如輸出電壓、過渡時間及抖動等)來確定。標準雖未給出這些參數間的關系,但可運用經驗。為保證最佳工作,當用隨機數來測試時,過渡時間應限制為小于位時間的50(,器件抖動則應限制為位時間的10-20(。這些經驗有助于在系統級保證有充分的信號電壓與時序余量。圖2為遵循這些建議的SN65LVDS100 (2 Gbps LVDS轉發器)器件眼圖,其中輸入為2 Gbps隨機數,輸出抖動為55 ps(源抖動為25 ps),而過渡時間則為160 ps。
驅動器功耗與信號電壓有關。RS-485擁有+/- 2V的擺幅,而M-LVDS則擁有+/- 0.6 V的擺幅。例如,在一個要求以10 Mbps速度及10米距離進行多點傳輸的設計中,采用M-LVDS及 RS-485均可。對于單通道工作,較好的選擇是SN65MLVD201 及 SN65HVD20。這兩種器件可提供同樣的占板面積、遵循標準并滿足指標要求。在使用SN65HVD20時,所需功率為使用SN65MLVD201時功率的四倍。SN65HVD20中的額外功率用來產生一個電壓更高的信號。盡管這種應用可能不需要這么大的功率,但當傳輸距離超過10米時會很有用。事實上,SN65HVD20允許以高于1 Mbps的速率進行信號傳輸,且傳輸距離可增加至500米。
結語
選擇最佳驅動器與接收器是一項關鍵決策。通過明確地確定系統要求,設計者可在各種選擇之間進行挑選。而像通道數、電源電壓及ESD保護等其他規范,則使設計者能獲得一組足以解決問題的器件。
責任編輯:gt
-
驅動器
+關注
關注
53文章
8264瀏覽量
146703 -
接收器
+關注
關注
14文章
2475瀏覽量
72049 -
存儲器
+關注
關注
38文章
7521瀏覽量
164096
發布評論請先 登錄
相關推薦
微型雙模無線接收器解決方案含設計文件
總線LVDS驅動器電路設計
isoPower解決方案在電路設計中的應用
LTC1347:5V低功耗RS232 3驅動器/5接收器收發器,5個接收器在關閉時處于活動狀態數據表

電機驅動器解決方案以及從分立元件構建驅動器
將 LVDS 驅動器與 Sub-LVDS 接收器對接應用說明





 工商網監
工商網監
評論