 基于FPGA實現具有自檢、自糾錯功能的EDAC電路設計
基于FPGA實現具有自檢、自糾錯功能的EDAC電路設計
1 引言
隨著人類對空間探索的深入,空間環境對空間飛行器的電子設備和器件的影響逐漸顯現 出來。空間輻射效應,特別是單粒子效應,對空間任務的完成具有潛在的巨大危害。星載計 算機是衛星的核心部件,在空間輻照環境下,必須充分考慮單粒子翻轉現象對星載計算機程 控功能的破壞或影響。針對該問題, 目前普遍采用糾錯檢錯(EDAC)設計對星載計算機的RAM 存儲單元進行糾錯檢錯處理來消除SEU故障。
EDAC功能可采用硬件和軟件兩種手段來實現。采用軟件手段實現,需要在讀寫RAM存儲 單元時,對存儲數據和冗余信息進行計算,因而要占用大量的CPU時間。對于星載計算機而 言,由于CPU器件選型的局限,限制了CPU的性能,使CPU資源非常寶貴,因此目前普遍采用 的是硬件手段來實現EDAC功能。隨著FPGA在通信信息特別是在航天領域的廣泛應用,FPGA 已成為EDAC功能實現的最佳硬件手段。從目前可獲得的資料看,近些年歐美發射的衛星均采 用了FPGA作為星載計算機的核心器件。
2 基于漢明碼的傳統EDAC設計
2.1漢明編碼
目前有許多編碼可以用來作為抗SEU的糾錯碼使用,漢明編碼是最常用的EDAC編碼,由 Hamming于1950年構造。這種編碼可以進行檢錯和糾錯,可以檢測1比特和2比特錯誤,只能 糾正1比特錯誤,因此適用于單組數據中出現多個錯誤位概率較低的情況,這恰與SEU經常會 修改星上RAM存儲單元1比特信息的情況相符。
漢明編碼的實現增加的硬件資源主要是存儲器單元,用來存儲冗余數據,另外還增加了 編碼和解碼電路,參加編碼和解碼的異或門電路隨著原始數據位數的增加而線性增加。在處 理性能方面,編碼和解碼造成一定的延時,增加了存儲器的讀寫時間。
2.2傳統的EDAC電路設計
傳統的EDAC電路設計僅實現讀寫功能,基本原理框圖如圖1所示.寫操作時,CPU將數據送入EDAC編碼模塊中,EDAC編碼模塊根據該數據生成校驗碼,并將原始數據和校驗碼分別寫 入數據RAM和校驗RAM中;讀操作時,CPU將數據RAM和校驗RAM中的數據取出,送入EDAC糾錯模 塊中,EDAC糾錯模塊將正確的數據送至CPU。這里EDAC編碼\糾錯模塊的硬件實現可以是專用 芯片,也可以采用通用的中小規模集成電路搭建。

SEU造成的RAM單元1比特錯誤如果不定時清除,就會產生累積,使計算機由此處理的結 果產生出2比特甚至更多比特錯誤,這種情況下將無法采用EDAC功能進行數據糾錯,導致系 統錯誤操作甚至任務失敗。因此定時對RAM存儲單元進行更新是必要的,但在傳統EDAC電路 設計下,對RAM存儲單元的更新只能由計算機的CPU(單片機)進行,其操作流程如下:
(1) 從存儲單元讀出數據;
(2) 將讀出數據重寫入;
(3) 重復(1)~(2),直至全部單元更新完。
以航天計算機常用的80C32單片機為例,CPU對外部存儲單元的讀或寫操作需要2個指令 周期,讀完再寫入需要4個指令周期,每個指令周期包含12個時鐘。假設CPU時鐘為20MHz, 更新1M個RAM存儲單元需要的CPU時間為:4×12×1M 20MHz = 2.4s。
對于星上非常緊張的CPU資源來說,這是難以接受的,大大增加了星上CPU軟件的設計難 度。這種方法的另一個大的缺點是無法獲得數據錯誤信息,因為CPU直接讀取的是糾錯后的 數據,所以無法對星上SEU造成RAM單元出錯的概率和錯誤模式進行統計。
3 基于FPGA的自檢EDAC設計
3.1 功能分析
由于FPGA的內部大量的邏輯資源,使EDAC電路設計可以實現更加復雜的功能。在星載計 算機中,為了提高效率并節省CPU資源,一個理想的EDAC電路設計,應具有以下三部分功能:
(1)數據讀寫功能。在CPU寫操作時,對原始數據進行編碼,生成校驗碼,并將原始數 據和校驗碼存儲;在CPU讀操作時,從存儲器中取出原始數據和校驗碼,進行計算,如有錯 誤,將錯誤糾正后輸出,如無錯誤,直接將原始數據輸出。
(2)自檢、自糾錯功能。在CPU控制要求下,可自動對所有EDAC保護的RAM存儲區進行 順序讀取和校驗,檢測出錯誤數據或校驗碼。在自檢狀態下,如果由CPU配置為自糾錯狀態, 當某一RAM單元檢測出單比特錯誤后,自動將正確數據和校驗碼重新寫入該RAM單元。該項功 能的實施,基本上可保證SEU對計算機RAM區造成的影響及時得到修復。
(3)錯誤信息處理功能。在CPU讀操作或者自檢狀態下,通過輸出錯誤標志信號,對CPU 產生中斷,對產生的錯誤進行相應處理。在CPU讀操作或者自檢狀態下,如果檢測出錯誤, 將出錯的地址、原始數據和校驗碼進行暫存,可由CPU讀取,進行相應處理。
3.2 設計與實現
根據以上分析,筆者設計了如圖2所示的自檢EDAC電路,EDAC的功能主要由FPGA來實現。 到目前為止,具有航天等級的FPGA芯片已經具有內置的CPU硬核以及高達2.5Mbit的RAM資源, 因此該設計中的CPU和RAM模塊均可以是FPGA內部資源,當內部資源無法滿足設計要求時,也 可以采用外置CPU芯片或外置RAM芯片。
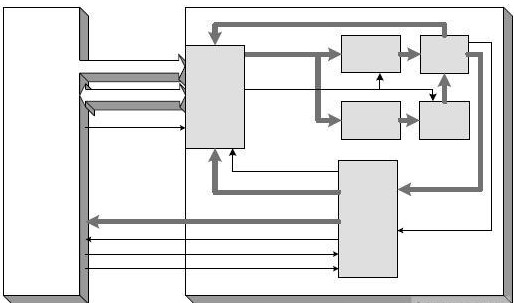
在本設計中,我們采用外置的CPU芯片和內置的RAM單元,作為自檢EDAC電路的硬件平臺 (或環境、資源)。CPU芯片在這里起到的作用是啟動EDAC自檢,處理錯誤中斷,向地面傳 送錯誤信息,并根據地面要求對錯誤信息進行處理。
在該設計中,檢測一個存儲單元地址僅需要4個時鐘周期,如果開啟自糾錯功能,并且 檢測到單比特錯誤,再增加2個時鐘周期用來糾錯。因此如果時鐘為20MHz,并且錯誤數據較 少,則更新1M個RAM存儲單元需要的時間約為:4×1M 20MHz = 0.2s。
更重要的是,在這0.2s的時間里,僅在出現錯誤時需要向計算機產生中斷,進行相應處 理,對地面進行錯誤報告,因而CPU處理時間很短,節省了寶貴的CPU資源。
3.3 仿真與驗證
在空間環境下普遍存在的SEU,在地面環境下是很難獲得的,為了在地面對該EDAC電路 設計進行驗證,需要采取故障注入手段。由于在本例中RAM存儲單元采用FPGA內部資源,因 此故障注入變得相對簡單。在FPGA進行程序綜合時,可將預先編制好的RAM存儲單元初始化 文件一起綜合。因此我們可在編制RAM存儲單元初始化文件時,對某些比特位進行修改,以 模擬空間環境下SEU對RAM存儲單元的影響。
在這里采用Xilinx公司的XQRV300為硬件載體,該型號FPGA芯片在航天領域內被廣泛使 用。為節省仿真時間,數據RAM存儲單元采用256*8bit,檢驗RAM存儲單元采用25*bit。在 RAM存儲單元初始化文件中,人工加入了12個單比特錯誤,以及1個兩比特錯誤,如下表所示。

為仿真簡便起見,向存儲單元存放的正確數據與存儲單元地址相同。
時鐘選擇為20MHz,通過采用ModelSim軟件進行布線后仿真,我們可以得到圖3所示結果。
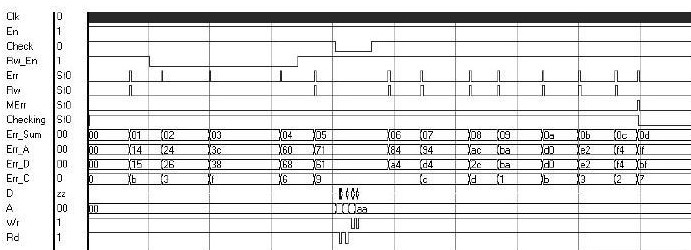
圖中: Clk — 系統時鐘;
En — EDAC 模塊使能控制;
Check — 自檢啟動/使能信號(信號上升沿觸發一次巡檢,信號為低暫停巡檢);
Rw_En — 自糾錯使能信號(為高允許糾錯);
Err — 錯誤中斷(標志)信號;
Rw — 自糾錯標志信號(為高表示正在進行自糾錯操作);
MErr — 多比特錯誤中斷(標志)信號;
Checking — 自檢標志(為高表示尚未完成本次巡檢操作);
Err_Sum,Err_A,Err_D,Err_C — 錯誤計數,錯誤地址,原始數據,原始校驗碼;
D,A,Wr,Rd — 單片機數據、地址、寫操作、讀操作信號;
從圖中可以看出,啟動EDAC自檢后,EDAC開始巡檢RAM存儲單元,產生錯誤中斷(標志) 信號,給出錯誤信息。當單片機需要處理中斷時,將Check信號置‘0’,可暫時停止巡檢, 此時單片機可對RAM存儲單元進行正常讀寫操作。等中斷處理完后,單片機將Check信號置 ‘1’,恢復RAM巡檢操作。
另外可通過Rw_En的置‘0’或‘1’,來控制禁止或允許進行自糾錯操作。
當出現可識別的多位錯誤時,產生Err和MErr兩個錯誤中斷(標志)信號,但由于漢明碼僅能糾正單比特錯誤,因此不進行自糾錯操作。
從原注入錯誤數據對應的地址讀出數據,仿真輸出結果如圖4所示。
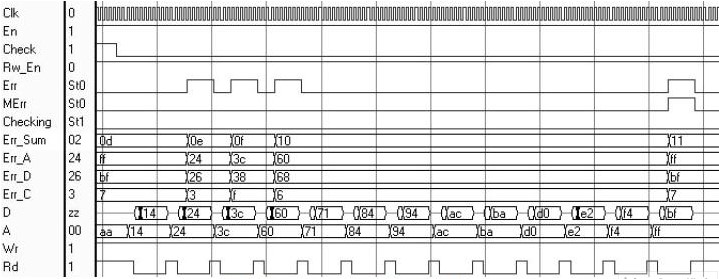
可以看出除最后一個地址(FFH)由于兩位錯仍輸出錯誤外,其他地址輸出數據均與地址相同,即為正確數據。
其中,24H、3CH、60H三個地址雖然輸出正確數據,但仍報錯,表明存儲器內數據仍然 為錯誤數據,在輸出時進行了糾錯。這是由于在上次巡檢到這部分地址空間時,通過把Rw_En 信號拉低,從而禁止了自動糾錯,導致這三個地址錯誤數據未被糾正。而在對其他地址進行 數據讀取時,未產生錯誤標志,證明其他錯誤數據已被糾錯。
4 結論
本文在采用FPGA芯片實現基本EDAC讀寫功能的設計思路基礎上,創建了一種新型的可對 RAM存儲單元進行自檢的EDAC功能模塊。該模塊不但可以對RAM存儲單元進行快速巡檢,巡檢 時間僅為傳統EDAC方法的十二分之一,還可以自動糾正已發現的錯誤。該模塊最大的優點在 于節省了單片機資源,幾乎不需要單片機的參與即可完成所有自檢功能,從而使基于FPGA 的星載計算機對SEU事件防護能力得到較大的提升。本文中該模塊采用Verilog硬件描述語言 編程,具有可移植性,這種設計方法可用于各種體系結構的星載計算機中。
-
FPGA
+關注
關注
1630文章
21759瀏覽量
604340 -
RAM
+關注
關注
8文章
1369瀏覽量
114778 -
計算機
+關注
關注
19文章
7520瀏覽量
88223
發布評論請先 登錄
相關推薦
移動通信中變速率自糾錯解碼器設計
S698M SoC芯片中EDAC模塊的設計與實現
基于FPGA的星載計算機自檢EDAC電路設計
計算機RAM檢錯糾錯電路的設計與實現
基于FPGA的檢糾錯邏輯算法的實現
用FPGA實現糾錯編碼的一種方法

FPGA的硬件電路設計教程和FPGA平臺資料簡介
FPGA最小系統配置電路設計與實現
FPGA_ASIC-S698MSoC芯片中EDAC模塊的設計與實現

FPGA CPLD數字電路設計經驗分享.
FPGA-SoC芯片中EDAC模塊的設計與實現





 工商網監
工商網監
評論