 測量角速率的MEMS陀螺儀有多個誤差貢獻因素
測量角速率的MEMS陀螺儀有多個誤差貢獻因素
測量角速率的MEMS陀螺儀有多個誤差貢獻因素,偏置不穩定性是其中之一。然而,與提供增強性能的分立器件相比,慣性測量單元(IMU)具有多方面優勢。六自由度IMU由多個慣性MEMS傳感器組成,這些傳感器經過溫度補償和校準,對齊在正交軸上。內置三軸陀螺儀測量繞一個已知點的旋轉,而三軸加速度計測量位移。后處理步驟利用數字信號處理器或微控制器執行,從而在內部實現傳感器融合。
陀螺儀會受偏置不穩定性影響,由于器件固有的不足和噪聲,陀螺儀的初始零點讀數會隨時間漂移。偏置可重復性可以在IMU的已知溫度范圍內進行校準。然而,恒定偏置不穩定性的積分會引起角度誤差。此類誤差會隨著陀螺儀旋轉或角度估計的長期漂移而累積。漂移的不良后果是航向計算的誤差會持續增加而不減退。加速度計則相反,其對振動和其他非重力加速度敏感。
引起陀螺儀漂移的主要原因是兩個因素的結合:一個是慢速變化的接近DC的變量,稱為偏置不穩定性;另一個是較高頻率的噪聲變量,稱為角度隨機游走(ARW)。這些參數的大小用每單位時間的旋轉角度來衡量。偏航軸對此漂移最為敏感。俯仰(姿態)和滾動軸的相當一部分陀螺儀漂移可以在IMU內部予以消除,即利用加速度計的反饋結果監控相對于重力的位置。在IMU內部利用低通或卡爾曼濾波器對陀螺儀輸出進行濾波,也是廣泛采用的消除部分漂移誤差的方法。
理想情況下,校正所有軸的陀螺儀漂移需要兩個基準。九自由度IMU通常會提供額外的磁力計傳感器——大約三軸。磁力計檢測磁場相對于地磁北極的強度。此類傳感器可以與加速度計數據一同使用,作為另一個外部基準,用來降低陀螺儀漂移誤差對偏航軸的影響。然而,設計適當的空間磁力計可能不如加速度計可靠,因為有很多東西會產生與地磁大小差不多的磁場。
另一種更有效的長期漂移消除方法是對陀螺儀實施零角速度更新。只要知道器件處于完全靜止狀態,便可將相應軸的陀螺儀偏移歸零。因具體應用不同,這樣的機會有很大差異。但只要系統處于重復出現的安靜狀態,例如汽車怠速、自主機器人靜止或人跨腳步之間的時間,就可以進行歸零調整。
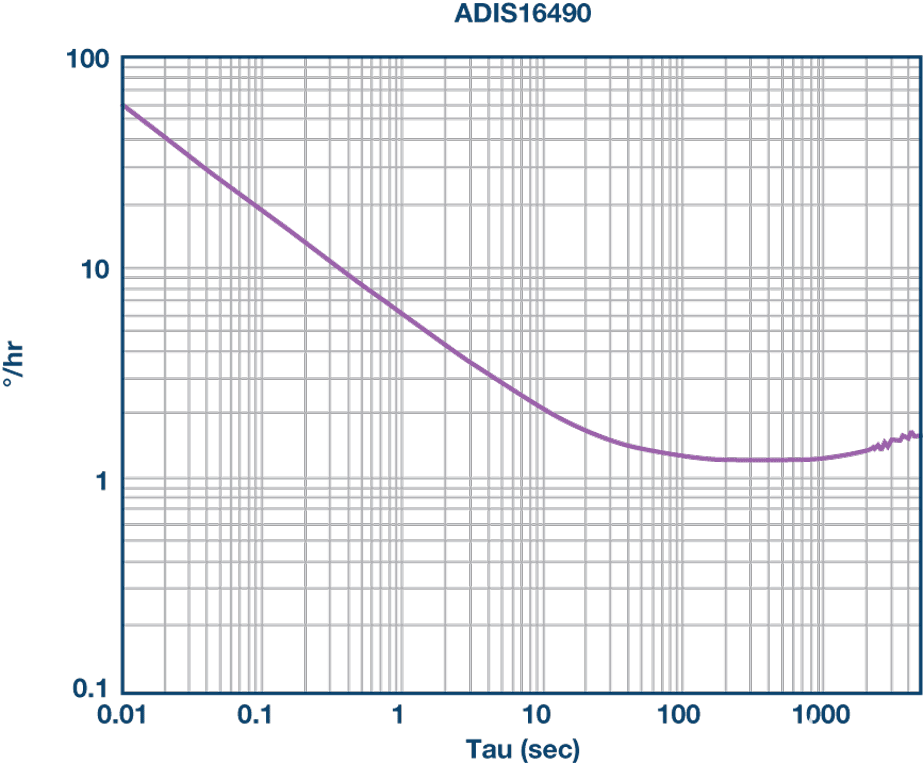
當然,一開始便在設計中使用偏置不穩定性最小的先進IMU,可以最直接地降低陀螺儀漂移。要測量陀螺儀的恒定偏置誤差,可以在器件未旋轉時,獲取輸出在較長時間內的平均值。IMU艾倫方差曲線顯示陀螺儀漂移(每小時旋轉度數)與積分時間(τ)的關系。它一般是以對數-對數比例尺繪制的。
ADIS16490是ADI高性能戰術級IMU產品系列中的最新產品。ADIS16490的運動中偏置穩定度僅為每小時1.8°。參見圖1所示的ADIS16490艾倫方差曲線,1小時點(3600秒)對應的誤差為1.8°。
圖1.ADIS16490陀螺儀艾倫方差根
-
微控制器
+關注
關注
48文章
7724瀏覽量
152683 -
陀螺儀
+關注
關注
44文章
800瀏覽量
99189 -
數字信號處理器
+關注
關注
5文章
472瀏覽量
27514
原文標題:【精選】誤入歧途的陀螺儀
文章出處:【微信號:eet-china,微信公眾號:電子工程專輯】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
MEMS IMU/陀螺儀對準基礎
基于MEMS陀螺儀的低噪聲反饋控制設計
MEMS陀螺儀中主要噪聲源的預測和管理
MEMS陀螺儀中主要噪聲源的預測和管理
陀螺儀的種類有哪些?
MEMS IMU/陀螺儀對準基礎
三軸陀螺儀有什么用_三軸陀螺儀的作用






 工商網監
工商網監
評論