 淺談伺服驅動器動力電和控制電
淺談伺服驅動器動力電和控制電
伺服驅動器
伺服驅動器(servo drives)又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分,主要應用于高精度的定位系統。一般是通過位置、速度和力矩三種方式對伺服電機進行控制,實現高精度的傳動系統定位,目前是傳動技術的高端產品。
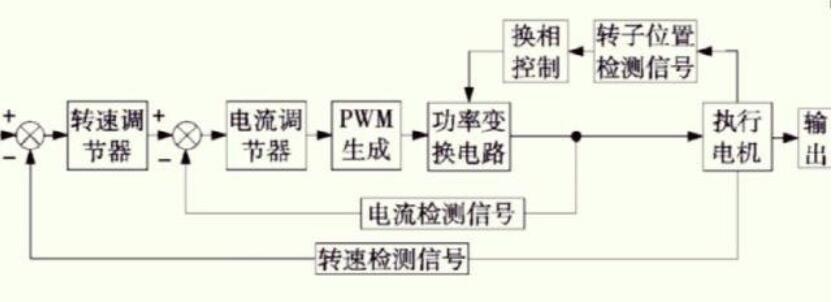
伺服驅動器是現代運動控制的重要組成部分,被廣泛應用于工業機器人及數控加工中心等自動化設備中。尤其是應用于控制交流永磁同步電機的伺服驅動器已經成為國內外研究熱點。當前交流伺服驅動器設計中普遍采用基于矢量控制的電流、速度、位置3閉環控制算法。該算法中速度閉環設計合理與否,對于整個伺服控制系統,特別是速度控制性能的發揮起到關鍵作用 [1] 。
在伺服驅動器速度閉環中,電機轉子實時速度測量精度對于改善速度環的轉速控制動靜態特性至關重要。為尋求測量精度與系統成本的平衡,一般采用增量式光電編碼器作為測速傳感器,與其對應的常用測速方法為M/T測速法。M/T測速法雖然具有一定的測量精度和較寬的測量范圍,但這種方法有其固有的缺陷,主要包括:1)測速周期內必須檢測到至少一個完整的碼盤脈沖,限制了最低可測轉速;2)用于測速的2個控制系統定時器開關難以嚴格保持同步,在速度變化較大的測量場合中無法保證測速精度。因此應用該測速法的傳統速度環設計方案難以提高伺服驅動器速度跟隨與控制性能 。
可以實現比較復雜的控制算法,實現數字化、網絡化和智能化。功率器件普遍采用以智能功率模塊(IPM)為核心設計的驅動電路,IPM內部集成了驅動電路,同時具有過電壓、過電流、過熱、欠壓等故障檢測保護電路,在主回路中還加入軟啟動電路,以減小啟動過程對驅動器的沖擊。功率驅動單元首先通過三相全橋整流電路對輸入的三相電或者市電進行整流,得到相應的直流電。經過整流好的三相電或市電,再通過三相正弦PWM電壓型逆變器變頻來驅動三相永磁式同步交流伺服電機。功率驅動單元的整個過程可以簡單的說就是AC-DC-AC的過程。整流單元(AC-DC)主要的拓撲電路是三相全橋不控整流電路。
伺服驅動器是現代運動控制的重要組成部分,被廣泛應用于工業機器人及數控加工中心等自動化設備中。尤其是應用于控制交流永磁同步電機的伺服驅動器已經成為國內外研究熱點。當前交流伺服驅動器設計中普遍采用基于矢量控制的電流、速度、位置3閉環控制算法。該算法中速度閉環設計合理與否,對于整個伺服控制系統,特別是速度控制性能的發揮起到關鍵作用。
基本要求
伺服進給系統的要求
1、調速范圍寬
2、定位精度高
3、有足夠的傳動剛性和高的速度穩定性
4、快速響應,無超調
為了保證生產率和加工質量,除了要求有較高的定位精度外,還要求有良好的快速響應特性,即要求跟蹤指令信號的響應要快,因為數控系統在啟動、制動時,要求加、減加速度足夠大,縮短進給系統的過渡過程時間,減小輪廓過渡誤差。
5、低速大轉矩,過載能力強
一般來說,伺服驅動器具有數分鐘甚至半小時內1.5倍以上的過載能力,在短時間內可以過載4~6倍而不損壞。
6、可靠性高
要求數控機床的進給驅動系統可靠性高、工作穩定性好,具有較強的溫度、濕度、振動等環境適應能力和很強的抗干擾的能力。
對電機的要求
1、從最低速到最高速電機都能平穩運轉,轉矩波動要小,尤其在低速如0.1r/min或更低速時,仍有平穩的速度而無爬行現象。
2、電機應具有大的較長時間的過載能力,以滿足低速大轉矩的要求。一般直流伺服電機要求在數分鐘內過載4~6倍而不損壞。
3、為了滿足快速響應的要求,電機應有較小的轉動慣量和大的堵轉轉矩,并具有盡可能小的時間常數和啟動電壓。
4、電機應能承受頻繁啟、制動和反轉。
測試平臺
目前,伺服驅動器的測試平臺主要有以下幾種:采用伺服驅動器—電動機互饋對拖的測試平臺、采用可調模擬負載的測試平臺、采用有執行電機而沒有負載的測試平臺、采用執行電機拖動固有負載的測試平臺和采用在線測試方法的測試平臺 。
1采用伺服驅動器—電動機互饋對拖的測試平臺
這種測試系統由四部分組成,分別是三相PWM整流器、被測伺服驅動器—電動機系統、負載伺服驅動器—電動機系統及上位機,其中兩臺電動機通過聯軸器互相連接。被測電動機工作于電動狀態,負載電動機工作于發電狀態。被測伺服驅動器—電動機系統工作于速度閉環狀態,用來控制整個測試平臺的轉速,負載伺服驅動器—電動機系統工作于轉矩閉環狀態,通過控制負載電動機的電流來改變負載電動機的轉矩大小,模擬被測電機的負載變化,這樣互饋對拖測試平臺可以實現速度和轉矩的靈活調節,完成各種試驗功能測試。上位機用于監控整個系統的運行,根據試驗要求向兩臺伺服驅動器發出控制指令,同時接收它們的運行數據,并對數據進行保存、分析與顯示。
對于這種測試系統,采用高性能的矢量控制方式對被測電動機和負載設備分別進行速度和轉矩控制,即可模擬各種負載情況下伺服驅動器的動、靜態性能,完成對伺服驅動器的全面而準確的測試。但由于使用了兩套伺服驅動器—電動機系統,所以這種測試系統體積龐大,不能滿足便攜式的要求,而且系統的測量和控制電路也比較復雜、成本也很高。
2采用可調模擬負載的測試平臺
這種測試系統由三部分組成,分別是被測伺服驅動器—電動機系統、可調模擬負載及上位機。可調模擬負載如磁粉制動器、電力測功機等,它和被測電動機同軸相連。上位機和數據采集卡通過控制可調模擬負載來控制負載轉矩,同時采集伺服系統的運行數據,并對數據進行保存、分析與顯示。對于這種測試系統,通過對可調模擬負載進行控制,也可模擬各種負載情況下伺服驅動器的動、靜態性能,完成對伺服驅動器的全面而準確的測試。但這種測試系統體積仍然比較大,不能滿足便攜式的要求,而且系統的測量和控制電路也比較復雜、成本也很高。
3采用有執行電機而沒有負載的測試平臺
這種測試系統由兩部分組成,分別是被測伺服驅動器—電動機系統和上位機。上位機將速度指令信號發送給伺服驅動器,伺服驅動器按照指令開始運行。在運行過程中,上位機和數據采集電路采集伺服系統的運行數據,并對數據進行保存、分析與顯示。由于這種測試系統中電機不帶負載,所以與前面兩種測試系統相比,該系統體積相對減小,而且系統的測量和控制電路也比較簡單,但是這也使得該系統不能模擬伺服驅動器的實際運行情況。通常情況下,此類測試系統僅用于被測系統在空載情況下的轉速和角位移的測試,而不能對伺服驅動器進行全面而準確的測試。
4采用執行電機拖動固有負載的測試平臺
這種測試系統由三部分組成,分別是被測伺服驅動器—電動機系統、系統固有負載及上位機。上位機將速度指令信號發送給伺服驅動器,伺服系統按照指令開始運行。在運行過程中,上位機和數據采集電路采集伺服系統的運行數據,并對數據進行保存、分析與顯示。
對于這種測試系統,負載采用被測系統的固有負載,因此測試過程貼近于伺服驅動器的實際工作情況,測試結果比較準確。但由于有的被測系統的固有負載不方便從裝備上移走,因此測試過程只能在裝備上進行,不是很方便。
5采用在線測試方法的測試平臺
這種測試系統只有數據采集系統和數據處理單元。數字采集系統將伺服驅動器在裝備中的實時運行狀態信號進行采集和調理,然后送給數據處理單元供其進行處理和分析,最終由數據處理單元做出測試結論。由于采用在線測試方法,因此這種測試系統結構比較簡單,而且不用將伺服驅動器從裝備中分離出來,使測試更加便利。此類測試系統完全根據伺服驅動器在實際運行中進行測試,因此測試結論更加貼近實際情況。但是由于許多伺服驅動器在制造和裝配方面的特點,此類測試系統中的各種傳感器及信號測量元件的安裝位置很難選擇。而且裝備中的其它部分如果出現故障,也會給伺服驅動器的工作狀態造成不良影響,最終影響其測試結果。
對于伺服驅動器而言,輸入一般分為動力電和控制電,動力電是強電部分,也就是給PWM的輸出提供強電部分,控制電可以理解為為生成PWM波形的控制波形的生成;
對于伺服驅動器的動力電輸入:
允許單相/三相 200v,這里補充幾個基本的電氣概念:平時所說的三相380V,指的是線電壓為380v,也就是相與相之間的電壓為380v,單相電壓為220v;
如果伺服驅動器允許單相/三相220v,如果選用三相200v,則需要使用變壓器將三相380v變為三相200v,然后輸入伺服驅動器;如果給伺服驅動器輸入單相200v,則直接從三相380v中取單相就可以得到單相200v(單相200v指的就是相電壓為200v);
對于伺服驅動器的控制電輸入:
控制電的輸入如果為單相200v,則需要獲取單相的200v,或者通過變壓器獲取到單相200v,這個為AC輸入,在內部經過變換變為所要使用的DC;
控制點的輸入如果為DC,則一般選用DC24v,這個時候需要外部提供24v直流電源;
對于控制柜,可以選用變壓器,先將380v變為200v,即三相200v;然后再選用單相變壓器,取380v的電壓獲得單相200v;也就是變壓器包括三相變壓器和單相變壓器;所以控制電和動力電能夠單獨控制,不過均需要變壓器進行變換,然后使用。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
112文章
16418瀏覽量
178785 -
伺服驅動器
+關注
關注
22文章
488瀏覽量
31693
發布評論請先 登錄
相關推薦

伺服驅動器的作用與原理、應用領域
伺服驅動器作為自動化設備的核心部件之一,其作用和原理對于理解自動化設備的工作原理具有重要意義。本文將為您詳細介紹伺服驅動器的作用與原理。 一、伺服
上位機控制伺服驅動器故障怎么解決
實時監控和控制。當伺服驅動器出現故障時,上位機的故障診斷和處理能力至關重要。本文將從故障原因、故障類型、故障診斷方法和故障處理策略等方面,為讀者提供一套詳盡的解決方案。 二、故障原因分析 電源問題:電源不穩定、
伺服驅動器一上電就報過載解決方法
伺服驅動器在工業自動化領域中扮演著至關重要的角色,它負責接收控制器的指令并驅動電機按照預定的速度和位置進行運動。然而,伺服
伺服驅動器一上電就報過載解決方法及具體案例
? ? ? 伺服驅動器在工業自動化領域中扮演著至關重要的角色,它負責接收控制器的指令并驅動電機按照預定的速度和位置進行運動。然而,伺服
伺服驅動器不上電是什么原因
伺服驅動器是現代工業自動化領域中不可或缺的關鍵部件,它能夠精確控制電機的轉速、位置和力矩,廣泛應用于機器人、數控機床、包裝機械、紡織機械等領域。然而,在實際應用過程中,伺服
伺服驅動器控制模式有哪幾種?
伺服驅動器是現代工業自動化領域中不可或缺的關鍵部件之一,它通過精確控制電機的轉速、位置和力矩,實現對機械系統的精確控制。伺服
伺服驅動器的控制方式分析
1. 引言 伺服驅動器作為連接電機與控制系統的橋梁,其性能直接影響到整個系統的響應速度、穩定性和精度。隨著控制理論的發展和電子技術的革新,伺服





 工商網監
工商網監
評論