 基于RTW和VisualC++的半物理仿真系統的研究
基于RTW和VisualC++的半物理仿真系統的研究
1 、引言
電子調速器是柴油機的關鍵部件之一,當實際柴油機及其負載性能發生變化且與調速器設計參數不匹配時,柴油發電機組就無法正常工作,這時需要修改調速器的控制參數。另外,電子調速器在出廠前和維修后都需要進行性能試驗,以設定合適的控制參數滿足其調節性能。在柴油機上直接進行電子調速器的參數整定、性能測試、維修后性能恢復既不安全、又不經濟。進行半物理仿真是調速器進行實際配機試驗之前不可缺少的環節,其工程思路是建立柴油機發電機組全工作范圍動態仿真模型,通過輸入輸出接口電路與電子調速器相連構成一閉環控制系統,從而完成電子調速器的性能測試的相關試驗。
建立柴油發電機組的仿真模型是Simulink的強項。由于半物理仿真系統需要連接特定的硬件設備,仿真程序需要定制人機界面實現參數設置等功能,這部分功能的實現對于Simulink來講則難以完成,而這恰恰是Visual C++(VC)的強項。VC可視化C++編程環境具有強大的硬件控制功能和靈活豐富的人機界面設計功能。但直接采用VC建立柴油發電機組的仿真模型則難度很大。
針對這一問題本文提供一種從Simulink仿真模型平滑過渡到Visual C++集成開發環境的方法。具體實現是在Simulink中建立柴油發電機組的仿真模型,然后通過Matlab實時工作間(RTW)將Simulink仿真模型轉化成可移植的嵌入式C++代碼,最后和Visual C++的項目文件進行整合構成完全獨立運行的實時半物理仿真系統。
2 、柴油發電機組模型的構建及半物理仿真系統結構
柴油機的建模一般有2種途徑,一種是數學機理建模,一種是試驗辨識建模。數學機理建模主要從柴油機各部件的原始特性和結構參數入手,根據動力學和熱力學關系方程建立機理模型其建模的工作量大,計算復雜而且為模型的求解帶來一定的難度。試驗辨識建模是根據柴油機試驗臺試驗數據,采用不同的數學擬合方法建立柴油機的數學模型。對于研究電子調速器參數整定以及配機試驗,這里關心柴油機外部性能參數的關系,可以不考慮柴油機內部的熱力過程。只要柴油發電機組仿真模型能較真實地模擬柴油機及其負載特性,則測試結果就能較為真實地反映出電子調速器的實際配機性能。
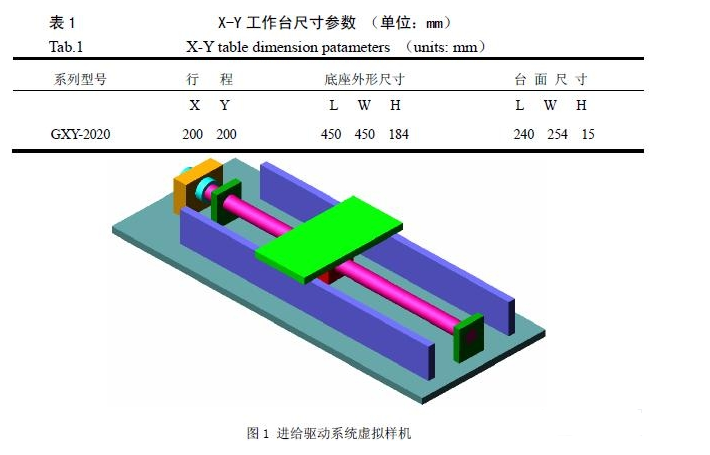
因此選用試驗辨識建模法,應用BP神經網絡建立柴油機發電機組模型。如圖1所示。MTU396柴油發電機組轉速控制半物理仿真系統的輸人輸出信號,主要有3種類型:
(1)脈寬調制(PWM)信號,即執行機構齒條驅動信號;
(2)頻率信號,即模擬柴油轉速脈沖信號;
(3)開關量信號,即對電子調速器的各種控制信號,如啟動、停止、增速減速控制等。
本系統選用研華的PCI-1780計數器卡,他提供8個16位計數器通道8路數字量輸出和8路數字量輸入,可以滿足上述需要。如圖2所示。

3 、半物理仿真系統的實現
3.1 利用RTW生成可移植的C++模型代碼
RTW是Matlab圖形建模和仿真環境Simulink的一個重要的補充功能模塊,簡而言之,他是一個基于Simulink的代碼自動生成環境。他能直接從Simulink的模型中產生優化的,可移植的代碼以加速仿真系統開發的過程和降低研發成本。
RTW能把Simulink模型中的某些參數或信號設置為全局變量,模型自動生成的可執行代碼在目標系統中運行時,可以方便地與Simulink模型交互,實現在線參數調整和信號通訊。利用RTW這種功能,可把模型中需要調整、監測的參數或者信號設置為全局變量。這些變量構成后面所述VC仿真程序中模塊間交互的橋梁。
RTW支持多種目標,所以RTW自動生成C++模型代碼有多種選擇,對于VC而言有3種目標可以選擇:通用實時(GRT)目標、通用實時Malloc(GRTM)目標、嵌入式目標。通用實時(GRT)目標采用實時代碼格式,其內存的分配在編譯時被靜態聲明。通用實時Malloc(GRTM)目標采用實時Malloc代碼格式,他與實時代碼格式非常相似,主要的區別在于實時malloc代碼格式對內存進行動態聲明。嵌入式目標可按嵌入式代碼格式生C++代碼,在運行速度、內存使用量和簡化等方面都進行了優化。嵌入式代碼采用靜態內存分配方式。本文選擇嵌入式目標來自動生成嵌入式代碼。
RTW自動生成的代碼分為2部分:一部分是模型代碼;另一部分是代碼運行界面(run-time interface)。這些代碼被切分成很多源代碼文件,為了管理這個龐大的項目,RTW還為其自動生成一個make文件。用VC打開make文件并編譯,然后將此項目中引用的所有源文件從Matlab安裝目錄中復制出來,并和模型代碼共同組成仿真模型代碼。
3.2 模型代碼和VC程序的集成
模型代碼同VC程序整合過程比較簡單,把3.1節仿真運算模塊所有涉及的源文件添加到VC程序項目中,需要注意2點:仿真模塊的源文件添加到VC程序項目后默認應用預編譯頭文件選項,必須手工取消此項設置否則編譯出錯;為了需要在VC程序中調用仿真代碼的接口函數需要進行全局聲明。
3.3 VC中仿真系統進一步開發與整合
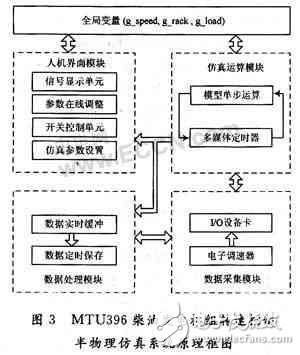
半物理仿真軟件一般由人機界面模塊、數據采集模塊、仿真運算模塊、數據處理模塊組成。MTU396柴油發電機組轉速控制半物理仿真系統原理如圖3所示。下面簡單介紹各模塊的實現過程。
(1)人機界面模塊的實現
人機界面模塊構成了VC程序的主線程,主要完成變量的實時顯示、參數在線調整、控制參數設置和程序的運行控制等功能,其他模塊都由他來調度。本系統中涉及的實時變量有柴油機轉速、齒桿位移、柴油機負載等,筆者分別設計了轉速表、棒圖、趨勢曲線、調整滑桿、功能按鈕等圖元,充分利用面向對象方法的封裝、繼承等特點實現整個圖元庫,從而提高了軟件系統的可修改性、可重用性和可擴展性。
(2)數據采集模塊的實現
數據采集模塊通過PCI-1780設備卡同電子調速器進行數據交互,電子調速器的供油量信號以脈寬調制(PWM)的形式由PCI-1780設備卡傳給仿真程序,仿真程序通過仿真計算把柴油機的轉速以頻率信號的形式經PCI-1780設備卡反饋給電子調速器。數據采集模塊由廠家提供的設備驅動API函數實現。
(3)仿真運算模塊的實現
仿真運算模塊在RTW轉化韻仿真模型代碼基礎上還要加入仿真同步控制,以滿足仿真的實時性要求。實時性的關鍵就是I/O數據定時的準確性。眾所周知Windows不是實時操作系統而是多任務的操作系統,采用VC編制的仿真程序很難實現硬件中斷,采用軟件定時是比較可行的方法,因為現在的計算機速度都很快,能夠保證一般硬件在回路仿真的實時性的需要。
VC中實現精確定時基本上有2種方法:①使用多媒體定時器。他使用單獨線程調用一個特殊的回調函數優先級很高,最小定時間隔為1ms能夠滿足一般實時任務的定時要求。②使用高性能計數器。在Windows2000中由硬件實現高精度的計數器(high-resolution performancecounter),利用他可以獲得高精度的定時間隔。由于本應用中電子調速器輸出頻率為80 Hz,本文選擇多媒體計時器實現仿真控制,定時間隔選為2 ms。即多媒體定時器每隔2 ms就在其回調函數中調用模型代碼接口函數rt_On-eStep(模型單步運算),保證整個仿真的向前推進,滿足系統實時性要求。仿真運算模塊完成模型實時計算是整個系統的核心。
(4)數據處理模塊的實現
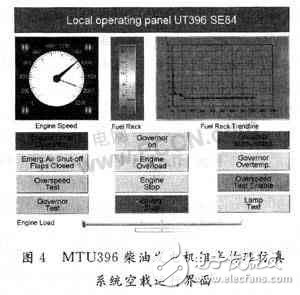
數據處理模塊完成仿真數據的實時記錄和定時保存功能。為了滿足數據記錄的實時性,仿真程序采用了多線程的技術,將數據定時保存功能放在獨立的數據保存線程中執行。數據處理線程和主線程的之間的同步由事件信號驅動。在C++標準模板庫(STL),deque容器基礎上創建了CPointsCollection類來完成數據的實時記錄和定時保存。采用的策略是:CPointsCollection首先在內存中開辟2塊緩沖區。第一緩沖區數據放滿后,數據開始存放到第二緩沖區,然后主線程同時通知數據保存線程將第一緩沖區中的數據采用VC序列化功能保存到硬盤的文本文件中;等第二緩沖區數據放滿后,數據開始存放到第一緩沖區,主線程同時通知數據保存線程將第二緩沖的數據保存到硬盤的文本文件中,這樣依次循環保證數據記錄的實時性。為了驗證利用該方法開發的半物理仿真系統的有效性,運行該系統與R082電子調速器物理連接進行配機試驗,仿真結果表明仿真系統相應符合理論分析結果。限于篇幅給出空載起動運行時的運行界面。如圖4所示。
4、 結 語
結合科研實例詳細介紹一種基于RTW和VisualC++的半物理仿真系統快速開發方法,該方法充分利用Simulink和Visual C++各自的優勢。首先利用Simulink可視化的建模方法建立系統的仿真模型,然后通過RTW將Simulink仿真模型轉化成可移植的嵌入式C++代碼,最后利用Visual C++靈活的可定制性和強大的界面功能實現完全獨立運行的實時半物理仿真系統。該仿真程序在Visual C++環境下可以對仿真程序方便的進行調試a與傳統設計方法相比這種方法具有費用低、效率高的特點。
-
仿真
+關注
關注
50文章
4082瀏覽量
133613 -
計數器
+關注
關注
32文章
2256瀏覽量
94575 -
發電機
+關注
關注
26文章
1635瀏覽量
67645
發布評論請先 登錄
相關推薦
仿真系統的性能優化技巧

機器人仿真的類型和優勢

無人機飛行仿真模擬訓練系統
實時級嵌入式系統半實物仿真測試平臺ETest

STM32L496 DMA收集到數據一半產生中斷,但是仿真時發現并不是數據的一半,為什么?
【分享】EasyGo 鏈式SVG系統的實時仿真應用
COMSOL Multiphysics在超材料與超表面仿真中的應用
數控伺服系統的ADAMS/MATLA聯合仿真研究
自動駕駛仿真系統中網絡安全測試方法研究

2023年中國半實物仿真模擬(HiL)行業洞察報告





 工商網監
工商網監
評論