 工業機器人對關節驅動電機的要求
工業機器人對關節驅動電機的要求
機器人電動伺服驅動系統是利用各種電動機產生的力矩和力,直接或間接地驅動機器人本體以獲得機器人的各種運動的執行機構。
對工業機器人關節驅動的電動機,要求有最大功率質量比和扭矩慣量比、高起動轉矩、低慣量和較寬廣且平滑的調速范圍。特別是像機器人末端執行器(手爪)應采用體積、質量盡可能小的電動機,尤其是要求快速響應時,伺服電動機必須具有較高的可靠性和穩定性,并且具有較大的短時過載能力。這是伺服電動機在工業機器人中應用的先決條件。
一、機器人對關節驅動電機的主要要求
1、快速性
電動機從獲得指令信號到完成指令所要求的工作狀態的時間應短。響應指令信號的時間愈短,電伺服系統的靈敏性愈高,快速響應性能愈好,一般是以伺服電動機的機電時間常數的大小來說明伺服電動機快速響應的性能。
2、起動轉矩慣量比大
在驅動負載的情況下,要求機器人的伺服電動機的起動轉矩大,轉動慣量小。
3、控制特性的連續性和直線性
隨著控制信號的變化,電動機的轉速能連續變化,有時還需轉速與控制信號成正比或近似成正比。
4、調速范圍寬。
能使用于1:1000~10000的調速范圍。
5、體積小、質量小、軸向尺寸短。
6、能經受得起苛刻的運行條件
可進行十分頻繁的正反向和加減速運行,并能在短時間內承受過載。
目前,由于高起動轉矩、大轉矩、低慣量的交、直流伺服電動機在工業機器人中得到廣泛應用,一般負載1000N(相當100kgf)以下的工業機器人大多采用電伺服驅動系統。所采用的關節驅動電動機主要是AC伺服電動機,步進電動機和DC伺服電動機。其中,交流伺服電動機、直流伺服電動機、直接驅動電動機(DD)均采用位置閉環控制,一般應用于高精度、高速度的機器人驅動系統中。步進電動機驅動系統多適用于對精度、速度要求不高的小型簡易機器人開環系統中。交流伺服電動機由于采用電子換向,無換向火花,在易燃易爆環境中得到了廣泛的使用。機器人關節驅動電動機的功率范圍一般為0.1~10kW。工業機器人驅動系統中所采用的電動機。
二、電機大致可細分為以下幾種
1、交流伺服電動機
包括同步型交流伺服電動機及反應式步進電動機等。
2、直流伺服電動機
包括小慣量永磁直流伺服電動機、印制繞組直流伺服電動機、大慣量永磁直流伺服電動機、空心杯電樞直流伺服電動機。
3、步進電動機
包括永磁感應步進電動機。
速度傳感器多采用測速發電機和旋轉變壓器;位置傳感器多用光電碼盤和旋轉變壓器。近年來,國外機器人制造廠家已經在使用一種集光電碼盤及旋轉變壓器功能為一體的混合式光電位置傳感器,伺服電動機可與位置及速度檢測器、制動器、減速機構組成伺服電動機驅動單元。
機器人驅動系統要求傳動系統間隙小、剛度大、輸出扭矩高以及減速比大。
三、常用的減速機構
1、RV減速機構;
2、諧波減速機械;
3、擺線針輪減速機構;
4、行星齒輪減速機械;
5、無側隙減速機構;
6、蝸輪減速機構;
7、滾珠絲杠機構;
8、金屬帶/齒形減速機構;
9、球減速機構。
工業機器人電動機驅動原理如圖所示:
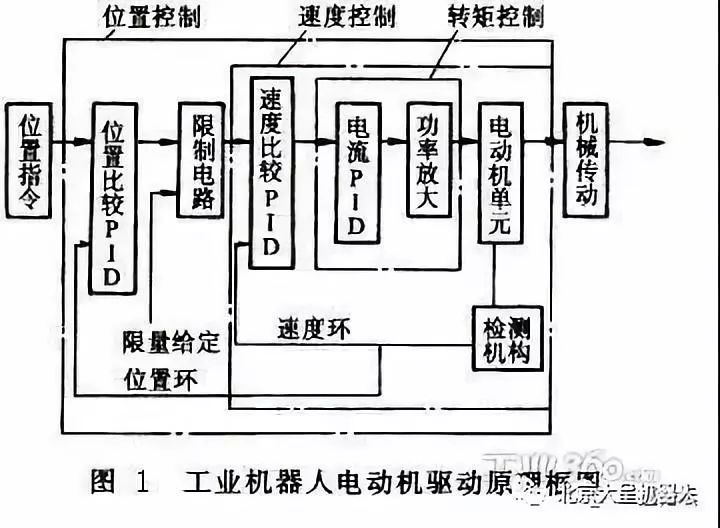
工業機器人電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。
目前國外許多電動機生產廠家均開發出與交流伺服電動機相適配的驅動產品,用戶根據自己所需功能側重不同而選擇不同的伺服控制方式,一般情況下,交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現以下功能:
1、位置控制方式;
2、速度控制方式;
3、轉矩控制方式;
4、位置、速度混合方式;
5、位置、轉矩混合方式;
6、速度、轉矩混合方式;
7、轉矩限制;
8、位置偏差過大報警;
10、速度及加速度前饋參數設置;
11、零漂補償參數設置;
12、加減速時間設置等。
四、驅動器種類
1、直流伺服電動機驅動器
直流伺服電動機驅動器多采用脈寬調制(PWM)伺服驅動器,通過改變脈沖寬度來改變加在電動機電樞兩端的平均電壓,從而改變電動機的轉速。
PWM伺服驅動器具有調速范圍寬、低速特性好、響應快、效率高、過載能力強等特點,在工業機器人中常作為直流伺服電動機驅動器。
2、同步式交流伺服電動機驅動器
同直流伺服電動機驅動系統相比,同步式交流伺服電動機驅動器具有轉矩轉動慣量比高、無電刷及換向火花等優點,在工業機器人中得到廣泛應用。
同步式交流伺服電動機驅動器通常采用電流型脈寬調制(PWM)相逆變器和具有電流環為內環、速度環為外環的多閉環控制系統,以實現對三相永磁同步伺服電動機的電流控制。根據其工作原理、驅動電流波形和控制方式的不同,它又可分為兩種伺服系統:
(1)矩形波電流驅動的永磁交流伺服系統。
(2)正弦波電流驅動的永磁交流伺服系統。
采用矩形波電流驅動的永磁交流伺服電動機稱為無刷直流伺服電動機,采用正弦波電流驅動的永磁交流伺服電動機稱為無刷交流伺服電動機。
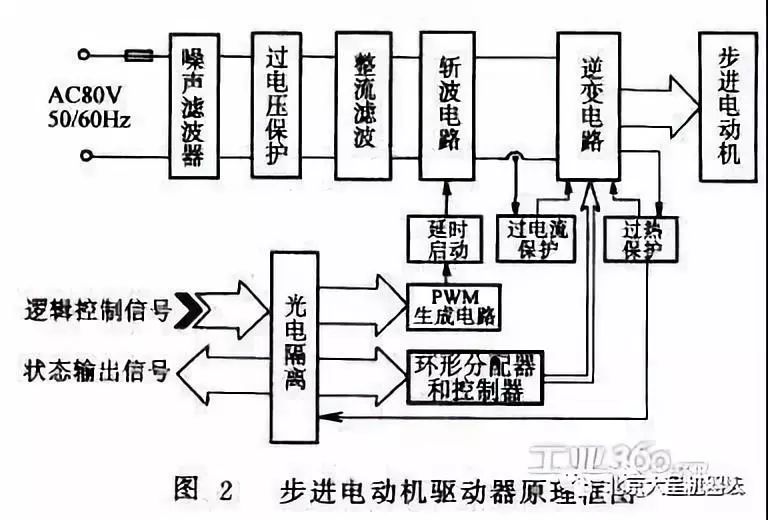
3、步進電動機驅動器
步進電動機是將電脈沖信號變換為相應的角位移或直線位移的元件,它的角位移和線位移量與脈沖數成正比。轉速或線速度與脈沖頻率成正比。在負載能力的范圍內,這些關系不因電源電壓、負載大小、環境條件的波動而變化,誤差不長期積累,步進電動機驅動系統可以在較寬的范圍內,通過改變脈沖頻率來調速,實現快速起動、正反轉制動。作為一種開環數字控制系統,在小型機器人中得到較廣泛的應用。但由于其存在過載能力差、調速范圍相對較小、低速運動有脈動、不平衡等缺點,一般只應用于小型或簡易型機器人中。
4、直接驅動
所謂直接驅動(DD)系統,就是電動機與其所驅動的負載直接耦合在一起,中間不存在任何減速機構。
同傳統的電動機伺服驅動相比,DD驅動減少了減速機構,從而減少了系統傳動過程中減速機構所產生的間隙和松動,極大地提高了機器人的精度,同時也減少了由于減速機構的摩擦及傳送轉矩脈動所造成的機器人控制精度降低。而DD驅動由于具有上述優點,所以機械剛性好,可以高速高精度動作,且具有部件少、結構簡單、容易維修、可靠性高等特點,在高精度、高速工業機器人應用中越來越引起人們的重視。
作為DD驅動技術的關鍵環節是DD電動機及其驅動器。它應具有以下特性:
(1)輸出轉矩大:為傳統驅動方式中伺服電動機輸出轉矩的50~100倍。
(2)轉矩脈動小: DD電動機的轉矩脈動可抑制在輸出轉矩的5%~10%以內。
(3)效率:與采用合理阻抗匹配的電動機(傳統驅動方式下)相比,DD電動機是在功率轉換較差的使用條件下工作的。因此,負載越大,越傾向于選用較大的電動機。
目前,DD電動機主要分為變磁阻型和變磁阻混合型,有以下兩種結構型式:
(1)雙定子結構變磁阻型DD電動機;
(2)中央定子型結構的變磁阻混合型DD電動機。
5、特種驅動器
(1)壓電驅動器
眾所周知,利用壓電元件的電或電致伸縮現象已制造出應變式加速度傳感器和超聲波傳感器,壓電驅動器利用電場能把幾微米到幾百微米的位移控制在高于微米級大的力,所以壓電驅動器一般用于特殊用途的微型機器人系統中。
(2)超聲波電動機
(3)真空電動機
用于超潔凈環境下工作的真空機器人,例如用于搬運半導體硅片的超真空機器人等。
-
電機驅動
+關注
關注
60文章
1217瀏覽量
86758 -
工業機器人
+關注
關注
91文章
3363瀏覽量
92655
原文標題:工業機器人常用電機驅動系統的分類與要求
文章出處:【微信號:jingzhenglizixun,微信公眾號:機器人博覽】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
工業機器人的產業鏈
工業機器人結構、驅動及技術指標詳解
拆開工業機器人,讓你見識機器人驅動系統中的電機種類
拆開工業機器人,讓你見識機器人驅動系統中的電機種類
工業機器人的末端關節旋轉該精確控制?
機器人對關節驅動電機的主要要求資料下載






 工商網監
工商網監
評論