") 淺談自動(dòng)駕駛等級(jí)定義及面臨的挑戰(zhàn)
淺談自動(dòng)駕駛等級(jí)定義及面臨的挑戰(zhàn)
自動(dòng)駕駛無(wú)疑是現(xiàn)今汽車領(lǐng)域最熱門的話題之一,無(wú)論是歷史悠久的汽車制造商或產(chǎn)業(yè)新星,皆在研發(fā)具有自動(dòng)駕駛功能的汽車。拜摩爾定律(Moore’s Law)之賜,這些自動(dòng)駕駛功能的開發(fā)者不僅大幅提升處理能力及改善傳感器技術(shù),還降低了成本。
「自動(dòng)駕駛」這個(gè)詞語(yǔ)涵蓋眾多功能的復(fù)雜技術(shù)領(lǐng)域,其中包含從「全自動(dòng)駕駛」到「與駕駛共享控制權(quán)」。為利于分辨不同的自動(dòng)駕駛能力,美國(guó)汽車工程師協(xié)會(huì)(Society of Automotive Engineers;SAE)便制訂如表1的自動(dòng)駕駛分級(jí)標(biāo)準(zhǔn)。

表1 SAE 自動(dòng)駕駛等級(jí)定義
隨著自動(dòng)駕駛等級(jí)的提高,車輛也需要更妥善地掌握周圍環(huán)境并能安全行駛,為達(dá)到此需求,車輛需要采用包含超聲波傳感器、全球定位系統(tǒng)(GPS)、雷達(dá)(RADAR)、攝像頭和激光雷達(dá)(LiDAR)等多種類型的傳感器,以及具備相關(guān)的處理能力。
每種類型的傳感器都能提供汽車整體環(huán)境的相關(guān)信息,而自動(dòng)駕駛汽車則需將這些元素融合在一起,才能構(gòu)成一幅完整的影像。根據(jù)執(zhí)行的自動(dòng)駕駛等級(jí),將改變傳感器的部署和類型,例如,攝像頭將用于車道維持輔助、盲點(diǎn)檢測(cè)和交通號(hào)志辨識(shí)等應(yīng)用;而頻率調(diào)變連續(xù)波(FMCW)雷達(dá)則用于確定與目標(biāo)物體間的距離。對(duì)于2級(jí)以上的自動(dòng)駕駛等級(jí)而言,充分理解汽車所處的環(huán)境十分重要,這樣,汽車才能辨識(shí)自身位置和周圍障礙物,進(jìn)而落實(shí)安全行駛,其可透過攝像頭、雷達(dá)、激光雷達(dá),以及GPS信息來(lái)完成對(duì)所處環(huán)境的掌握。但只參考GPS信息并不可靠,因?yàn)槠渚珳?zhǔn)度會(huì)改變,且訊號(hào)易受建筑物和基礎(chǔ)設(shè)施阻隔影響。
能夠掌握所在環(huán)境并采取行動(dòng),是達(dá)到自動(dòng)駕駛功能的關(guān)鍵條件,因此不論是SAE 6個(gè)等級(jí)中的哪一級(jí),只要出現(xiàn)意外的運(yùn)作或行動(dòng),生命與環(huán)境皆會(huì)受到威脅。所以自動(dòng)駕駛功能的開發(fā)必須限定在一個(gè)框架內(nèi),以確保設(shè)計(jì)和所有要素的安全性,嚴(yán)格遵守ISO 26262標(biāo)準(zhǔn)是開發(fā)自動(dòng)駕駛汽車的必要條件,若能實(shí)施該標(biāo)準(zhǔn)提供的框架,將有助于確保安全性,及定義多個(gè)車輛安全完整性等級(jí)(ASIL)與容許范圍內(nèi)的失誤率。部署自動(dòng)駕駛解決方案后,也將受到來(lái)自世界各市場(chǎng)的嚴(yán)苛環(huán)境考驗(yàn),為了確保系統(tǒng)在這些環(huán)境中能夠正常運(yùn)行,汽車級(jí)元件需通過被廣泛認(rèn)可的 AEC-Q100 或更高等級(jí)的資格認(rèn)證。
架構(gòu)執(zhí)行自動(dòng)駕駛功能的關(guān)鍵核心是中央處理模組。為了成功執(zhí)行自駕功能,中央處理模組必須包含以下功能:- 信息整合、預(yù)處理和分配(DAPD):能連接不同類型傳感器,并在處理單元內(nèi)的各個(gè)處理單元與加速器之間,執(zhí)行基本的信息處理、路由和交換。- 高效能連續(xù)處理:高效能處理單元用于執(zhí)行信息萃取和傳感器融合,并根據(jù)其輸入的資訊進(jìn)行高階決策制定。在某些應(yīng)用中,神經(jīng)網(wǎng)絡(luò)會(huì)在高效能連續(xù)處理中運(yùn)行。
- 安全處理:依據(jù)「DAPD元件預(yù)處理的環(huán)境信息」與「來(lái)自神經(jīng)網(wǎng)絡(luò)加速與高效能連續(xù)處理單元的結(jié)果」進(jìn)行即時(shí)處理與車輛控制。
創(chuàng)建中央處理模組時(shí),設(shè)計(jì)人員會(huì)面對(duì)接口、擴(kuò)展性、合規(guī)性和效能等多方面的挑戰(zhàn),若部署于功耗和散熱受限的環(huán)境中,還要解決傳統(tǒng)的尺寸、重量,以及功耗成本(Size, Weight and Power-Cost,SWaP-C)的難題,而在設(shè)計(jì)DAPD和安全處理器時(shí),SWaP-C的難題尤為明顯。
解決挑戰(zhàn)使用單個(gè)元件是解決這些挑戰(zhàn)的方案之一,此方法不僅能在同一個(gè)芯片中提供DAPD的接口、預(yù)處理和路由功能,還具備安全處理甚至是神經(jīng)網(wǎng)絡(luò)加速功能。這種高度整合的方法,打造了非常有利于解決SWaP-C的緊密整合解決方案。賽靈思(Xilinx)車規(guī)級(jí)Zynq UltraScale+ MPSoC異質(zhì)單芯片系統(tǒng),可用來(lái)運(yùn)作這類高度整合解決方案,該元件提供四個(gè)高效能Arm Cortex-A53核心的可編程邏輯,來(lái)構(gòu)成緊密整合的處理單元。此外,針對(duì)即時(shí)控制,異質(zhì)單芯片系統(tǒng)還提供包含鎖步(Lockstep)雙Arm Cortex-5處理器的即時(shí)處理單元(RPU),不僅可執(zhí)行高達(dá)ASIL C等級(jí)的安全功能,還可用于安全關(guān)鍵型應(yīng)用。為了提供必要的功能安全性,RPU經(jīng)過精心設(shè)計(jì),具有減少、檢測(cè)和緩解單個(gè)隨機(jī)故障(包括由硬件和單個(gè)事件觸發(fā))的能力,這些元件能有效地在處理器系統(tǒng)資源與可編程邏輯之間進(jìn)行功能區(qū)分。
DAPD帶來(lái)的主要挑戰(zhàn)在于如何在采用不同接口標(biāo)準(zhǔn)的眾多類型傳感器間建立連接。典型的解決方案是連接采用高速接口的多種傳感器,如MIPI、JESD204B、LVDS和GigE,來(lái)達(dá)到攝像頭、雷達(dá)和激光雷達(dá)這樣的高頻寬接口。但除此之外,DAPD還需要連接較慢的接口,如CAN、SPI、I2C和UART。若使用異質(zhì)單芯片系統(tǒng)的處理系統(tǒng)(PS)和可編程邏輯(PL),便可支持多種業(yè)界標(biāo)準(zhǔn)接口,包括SPI、I2C、UART和GigE;同時(shí),PL IO的高靈活性能讓MIPI、LVDS和十億位元串列連結(jié)直接連接,允許在PL中(通常使用IP核心)運(yùn)作更高階的協(xié)定。
此外,在 PL中執(zhí)行協(xié)定還能帶來(lái)其他優(yōu)勢(shì),例如輕松引入標(biāo)準(zhǔn)修訂,以及能靈活設(shè)定解決方案所支持的具體傳感器接口數(shù)量。而且,只要硬件設(shè)計(jì)提供正確的PHY,PL便可運(yùn)作任意接口,真正落實(shí)任意到任意的接口功能。車規(guī)級(jí)Zynq UltraScale+ MPSoC的PL還能加速神經(jīng)網(wǎng)絡(luò)。由于PL具有平行特性,因此相較于傳統(tǒng)采用CPU/GPU的方法,神經(jīng)網(wǎng)絡(luò)的執(zhí)行更具回應(yīng)性和確定性,因其消除了不同等級(jí)之間傳統(tǒng)的外部存儲(chǔ)器瓶頸。透過使用C、C++和OpenCL等這類高級(jí)語(yǔ)言,能在系統(tǒng)最佳化編譯器SDSoC中運(yùn)作這些神經(jīng)網(wǎng)絡(luò),進(jìn)而將功能從處理器系統(tǒng)無(wú)縫遷移到可編程邏輯內(nèi)。另一大挑戰(zhàn)是如何運(yùn)作安全處理器,其必須依照從DAPD和高效能連續(xù)處理所接收到的命令進(jìn)行操作,這些命令能確保車輛在所處環(huán)境中安全行駛,因此,安全處理器需要與汽車控制系統(tǒng)(如轉(zhuǎn)向、加速和剎車)直接進(jìn)行互動(dòng),這是自動(dòng)駕駛功能的一大關(guān)鍵層面,因?yàn)槿魏五e(cuò)誤將會(huì)導(dǎo)致生命的喪失和環(huán)境的破壞。異質(zhì)單芯片系統(tǒng)在RPU中包含鎖步雙Arm Cortex-R5核心,可用于運(yùn)作安全處理。
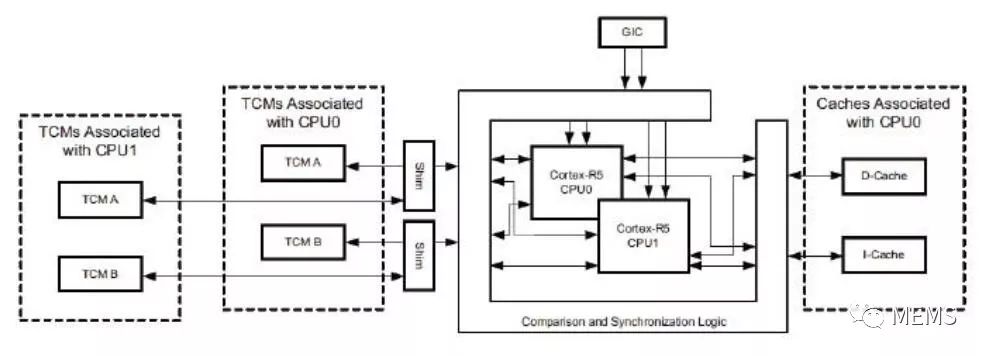
圖2 即時(shí)處理單元架構(gòu)
RPU 核心不僅具有鎖步功能,還能執(zhí)行多個(gè)附加的緩解功能。其中包括用于將 RPU 與存儲(chǔ)器和快取存儲(chǔ)器緊密耦合的糾錯(cuò)碼(Error Correction Code),以及用于保護(hù)DDR存儲(chǔ)器的雙錯(cuò)誤檢測(cè)單個(gè)錯(cuò)誤校正代碼。在快取存儲(chǔ)器和存儲(chǔ)器中加入ECC功能,可確保執(zhí)行自動(dòng)駕駛汽車控制所需的應(yīng)用程序和信息的完整性。此外,為了確保運(yùn)作前底層硬件沒有故障,還有提供啟動(dòng)時(shí)的內(nèi)建自檢測(cè)(BIST)功能,也可在運(yùn)作過程中按照使用者的需求執(zhí)行附加的BIST操作。此外,異質(zhì)單芯片系統(tǒng)的架構(gòu)還能在元件中隔離存儲(chǔ)器和周邊的功能。異質(zhì)單芯片系統(tǒng)導(dǎo)入的這些功能,讓同一芯片中能夠落實(shí)安全處理、DAPD、甚至神經(jīng)網(wǎng)絡(luò)加速。為了確保擁有業(yè)界領(lǐng)先的元件品質(zhì),賽靈思收集了產(chǎn)業(yè)需求并將其融入到名為Beyond-AEC-Q100的內(nèi)部品質(zhì)控制計(jì)劃中。此外,這款異質(zhì)單芯片框架中,將大部分的測(cè)試要求加倍,以確保達(dá)到汽車級(jí)元件的安全限度,不僅如此,更高整合度還能降低最終解決方案所需的PCB設(shè)計(jì)和互連的復(fù)雜性,同時(shí)達(dá)到更低功耗。
總結(jié)
提供自動(dòng)駕駛功能需要運(yùn)作中央處理模組,該模組面臨SWaP-C的挑戰(zhàn),因此采用針對(duì)DAPD、神經(jīng)網(wǎng)絡(luò)加速器和安全處理器的車規(guī)級(jí)高整合度解決方案,能夠落實(shí)更小巧、更輕便、更低功耗的解決方案。
-
傳感器
+關(guān)注
關(guān)注
2552文章
51359瀏覽量
755642 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13919瀏覽量
166779
原文標(biāo)題:解決自動(dòng)駕駛的挑戰(zhàn)
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

重塑線控底盤技術(shù):自動(dòng)駕駛的未來(lái)支柱
線控底盤,自動(dòng)駕駛時(shí)代的基石?
自動(dòng)駕駛汽車安全嗎?

智能駕駛與自動(dòng)駕駛的關(guān)系

自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案介紹#ADAS #自動(dòng)駕駛 #VTHiL






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論