 自動駕駛汽車的最終控制模塊分析
自動駕駛汽車的最終控制模塊分析
本文介紹的控制模塊,則負責汽車的最終控制,通過控制汽車的方向盤轉角和加速度來真正的駕駛車輛。
自動駕駛汽車先使用感知模塊了解其環境,并通過定位模塊了解其在環境中的位置,然后使用規劃模塊進行決策并生成軌跡。
航路點
控制過程包括遵循盡可能忠實生成的軌跡。路徑是一系列航路點,每個航路點包含位置(x, y),角度(偏航角)和速度(v)。
控制器也稱為控制算法。控制器的目的是為車輛生成指令,例如方向盤角度或加速度水平,同時考慮實際約束(道路,風,車輪滑移等),從而產生實際行駛軌跡。
機器人和車輛中存在大量的控制器。它們的復雜程度,取決于我們想要解決的問題。
PID - (比例-積分-微分控制器)
控制器有很多種類,最簡單的是比例-積分-微分控制器(或PID)。
PID控制器是根據偏差估計計算值(例如方向盤角度)的算法。偏差是指計劃的行車軌跡與實際的軌跡之間的差異。
在PID控制器中有三個元素:
P:比例單元—對方向盤應用與誤差成比例的校正。如果我們離目標太遠,我們會轉向另一個方向。
單個P控制器的缺點是它會引起恒定的振蕩。根據計算偏差的頻率,振蕩某種程度上也是必要的。系數Kp表征所需的振蕩程度。
D:微分單元—目的是通過在公式中加入阻尼項來抑制振蕩效應,表征偏差的變化。PD控制器評估誤差的減小情況,并逐漸縮小其接近平滑路徑所采用的角度。
I:積分單元—?最后一項用于糾正機械誤差,通過I參數來減小積累誤差,從而保證車輛按要求的軌跡行駛。旋轉PID曲線對應于使用算法來更快地找到系數,并因此更快地朝向參考軌跡收斂。
因此,我們需要綜合應用三個參數,以確保車輛實時有效地跟蹤軌跡。我們必須找到不同的Kp,Ki,Kd系數,以優化駕駛路徑。
PID控制器是世界上最簡單和最常見的控制器。它具有快速實施和在操作簡單的優點。對于單個汽車,PID控制器可用于計算角度,另一個用于計算加速度。
但橫向和縱向控制很難結合,而且不可能對車輛的物理進行建模。當我們開車時,我們會根據車輛的大小,質量和動力自然地調整機動,PID控制器無法做到這一點。
MPC - 模型預測控制
預測控制,包括工業控制、自適應控制及內模控制等多方面研究成果,統稱為模型預測控制(MPC,Model Predictive Control),或基于模型的控制(Model-based Control)。
模型預測控制是一種基于模型的閉環優化控制策略,表述為內部(預測)模型、滾動優化、反饋控制。
預測控制最大的吸引力在于它具有顯式處理約束的能力, 這種能力來自其基于模型對系統未來動態行為的預測, 通過把約束加到未來的輸入、輸出或狀態變量上, 可以把約束顯式表示在一個在線求解的二次規劃或非線性規劃問題中。
模型預測控制具有控制效果好、魯棒性強等優點,可有效地克服過程的不確定性、非線性和并聯性,并能方便的處理過程被控變量和操縱變量中的各種約束。
經典MPC的控制流程如下圖所示:
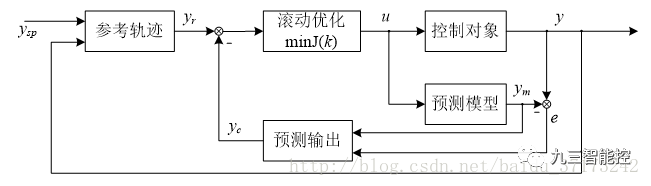
圖中,ysp表示系統的設定輸出,yr表示參考軌跡,u為輸入,y為實際輸出值,ym為模型輸出,yc為預測輸出。
在自動駕駛中應用MPC,首先需要定義執行器,以表征移動車輛的元素。汽車有三個執行器:方向盤,加速踏板和制動踏板。MPC的目的是通過改變上這些致動器發揮方向盤的角度,則在加速器踏板壓力或制動踏板。
制約因素和外力
我們在一個叫做非完整的環境中進化。這意味著,例如,車輪在物理上不能達到90°,它們通常只是在-30°和30°之間。考慮到這一點,可以獲得更真實的參考軌跡以逼近真實軌跡。我們還可以將加速度定義為-1(制動)和1(最大加速度)之間的值。
我們還有兩種可應用的模型:運動學和動態學。
運動學模型意味著我們的車輛按照數學公式的描述進行駕駛,形成車輛的運動和軌跡。
動態模型考慮了動力學的基本原理,并以此決定對車輛施加的力。這些力可以是空氣阻力,車輛重量,重力,車輪在地面上的摩擦力等。比如,離心力可以使車輛在轉彎時離開其軌跡,而運動模型則無法表征這個因素。
優 化
MPC控制器可以解決優化問題。其方法是計算幾個不同的“轉角-加速度”參數對,并選擇誤差最低的一對。
算法如下:首先,我們通過里程計、位置等參數, 計算當前狀態。
然后,分三部分完成解算器:
約束非完整世界(non-holonomic world)參數;
運動學或動力學模型執行t+1狀態;
計算t+1狀態的代價函數(Cost),也就是行車軌跡的代價函數。
因此,我們可以測試幾種角度和加速度組合(δ,a)。每種組合都與代價函數相關聯,然后算法選擇代價最低的參數對。
一旦執行了第一個動作,我們將重新計算未來狀態并預測新角度。
MPC控制器雖然非常強大,但很難實現。但開發這種調節器所花費的時間是值得的。MPC控制器可以允許車輛在保持安全的同時達到更快的速度,使自動駕駛更有樂趣。
結 語
對于我們想要自主的機器人和無人機,控制階段是強制性的。然而,這一步必須依賴于前期完美開發的所有模塊(感知、定和規劃)。
-
控制器
+關注
關注
112文章
16364瀏覽量
178072 -
MPC
+關注
關注
2文章
36瀏覽量
21229 -
自動駕駛汽車
+關注
關注
4文章
376瀏覽量
40832
原文標題:自動駕駛汽車控制模塊簡介
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論