 采用STM32F407芯片進行發動機狀態監測系統的設計
采用STM32F407芯片進行發動機狀態監測系統的設計
發動機是車輛的動力裝置,其狀態好壞直接影響車輛性能。發動機結構復雜,工作條件惡劣,因此是車輛運行中故障最多的組成之一。所以,對發動機狀態進行監測是具有重要現實意義的。
傳統的發動機狀態監測方法常見的有熱工參數監測法、磨損特征分析法等,這些方法要求在發動機多個部位上安裝傳感器,不僅自動化程度低,而且測試耗時費力,難以滿足現實需求,所以開發操作簡便、可靠性高的新型監測方法已變得十分迫切。在發動機工作過程中,每一種聲響都對應于特定頻譜,當其運行狀態不同時,如出現故障,其發出的聲音頻譜會出現變異和失真,總有一些特征頻譜區別于其他聲響。因此檢測發動機工作時發出的聲音信號,并利用LabVIEW編寫聲音信號處理軟件,能快速有效的提取聲音的特征信息。實現對汽車發動機狀態的監測,為汽車安全運行和后續故障診斷提供依據和保障。
1 系統總體設計
本系統以STM32F407做主控芯片,利用音頻傳感器作拾音器,將其安裝在發動機機架上,通過嵌入式系統進行音頻采樣和數據格式轉換,采集汽車發動機在不同狀態下因振動而發出的聲音信息,再用LabVIEW編寫程序對采集到的音頻信號進行處理和顯示,從中分析出發動機的運行狀態的特征。
2 系統硬件設計
系統硬件設計主要包括主控模塊、信號采集模塊、通信模塊和上位機。音頻傳感器采集發動機的聲音信號,將采集到的模擬信號轉換成數字信號,送入主控芯片進行格式轉換,再將轉換后的信號送到上位機的LabVIEW程序,對其進行處理,做譜分析,提取有用信息。
2.1 音頻采集模塊
本系統實現聲音檢測的硬件是MP45DT02 MEMS麥克風,該模塊由3V電源供電,麥克風帶有A/D轉換功能,主控模塊中由SPI或I2S外設產生的時鐘信號經主控芯片STM32F407的PB10引腳輸入MP45DT02,作為音頻采集的時鐘信號。該模塊采集聲音后,輸出PDM格式的高頻1位數字流信號,頻率范圍為1到3.25MHz,經由PC3腳輸入主控模塊。而主控芯片通過同步串口I2S對輸入的PDM數據流以8個樣本為一組進行采樣,再經過主程序的PDM Filter庫處理,將信號轉換成16位脈沖編碼調制(PCM)格式的數據流,產生音頻的原始信號,保存在大容量存儲介質中并送到LabVIEW程序處理分析。
2.2 按鍵通信模塊
本系統采用按鍵中斷來實現信號采集和主控芯片的控制關系。系統采用的用戶按鍵電路由3.3V電源供電,該模塊通過按下按鍵,將高電平信號從PA0腳輸入STM32F407,相當于發出一個中斷信號,控制音頻采集程序的開始及初始化,在系統中起到監視音頻采集的作用。
而應用的復位按鍵電路,連接的是STM32F407的NRST腳,它是異步復位腳。當通過控制復位鍵,從NRST腳將低電平輸入主控制器時,MCU執行復位程序,重設內部寄存器,以及片內SRAM;而當輸入高電平時,芯片被置位,PC指針從0地址開始。
2.3 主控模塊
主控模塊是整個系統的中心部分,包含了基本的電源電路。主控芯片時鐘信號是程序運行的基礎,這個模塊包含了高速外部時鐘(HSE)電路和低速外部時鐘(LSE)電路,可根據不同的需要來選擇不同的時鐘電路。同時,該模塊中還含有LED燈電路,通過其不同的發光狀態,來了解程序執行到哪一步,便于程序排錯及處理。
3 系統軟件設計
系統的軟件部分主要由主程序、系統初始化管理、按鍵管理、顯示管理、中斷管理、時鐘管理、通信管理等模塊組成。主程序可調用各模塊,引導系統進入正常運行狀態,協調軟、硬件有條不紊地工作。顯示模塊主要是在數據采集的過程中指示燈的不同狀態代表不同的程序運行階段顯示和在數據分析中得到的圖譜和特征值顯示。而系統的通信則包括單片機與拾音器的通信和單片機與上位機的通信。
3.1 主控模塊軟件設計
主控模塊主要是通過單片機STM32F407來控制各個外設的運行,系統上電后,首先進入系統初始化,初始化可編程器件、輸入/輸出端口和相關參數,之后主程序處于循環掃描模式,等待定時及按鍵中斷,以便捕捉中斷信號從而進入相應地服務模塊。系統主流程圖如圖1所示,整個程序由數據采集、數據轉換、數據分析三個部分構成循環體系,當得到預期的音頻圖譜后,就返回主程序。
3.2 數據采集模塊軟件設計
本系統中使用的音頻采集芯片是MP45DT02 MEMS麥克風。在數據采集開始之前,首先要進行初始化,將I2S外設產生的1024KHz時鐘配置為主時鐘,以生成正確的數字麥克風輸入時鐘1024MHz。1024MHz的時鐘頻率可根據輸出音頻數據流(16KHz)和選擇的采樣因子(64)計算得出(16000Hz x 64 =1024MHz)。之后執行數據采集循環程序,直到獲得16位PDM數據樣本,才進入下一中斷程序。
3.3 數據轉換模塊軟件設計
音頻信號被捕獲以后,經MEMS麥克風處理輸出的音頻信號是PDM格式1位數據流,這是一種在數字域中表示模擬信號的形式,它的表示方式是對一系列與模擬信號幅值對應的脈沖的相對密度進行編碼。而本系統中LabVIEW程序不能處理PDM數據,所以要通過PDM Filter lib對其進行處理,將其轉換為PCM數據。該庫要對信號進行濾波和采樣處理,因為麥克風輸出的PDM數據的頻率與輸入的時鐘信號頻率一樣,比較高,所以在這個過程中,首先要做的是降低采樣頻率。之后還要對信號進行調節,先用高通濾波器消除信號的直流偏移,保證信號的質量,然后用低通濾波器送出數據。整個過程完成之后,才能將音頻信號轉化PCM格式。而調節中涉及到的兩個濾波器可在程序中通過初始化函數使能、禁止和配置,相關增益G=Mic Gain/64。
3.4 數據分析模塊軟件設計
數據分析部分要在上位機的LabVIEW中用圖形化編程語言完成,該部分要對存儲的音頻文件做濾波和頻譜分析等處理,數據分析程序框圖如圖2所示。進入數據分析子程序后,先要進行初始化,將PCM數據讀進來,再對信號進行濾波除噪,然后分別對信號進行頻譜變換、特征值測量和單頻測量,將得到的相應圖譜和數據顯示在前面板上。
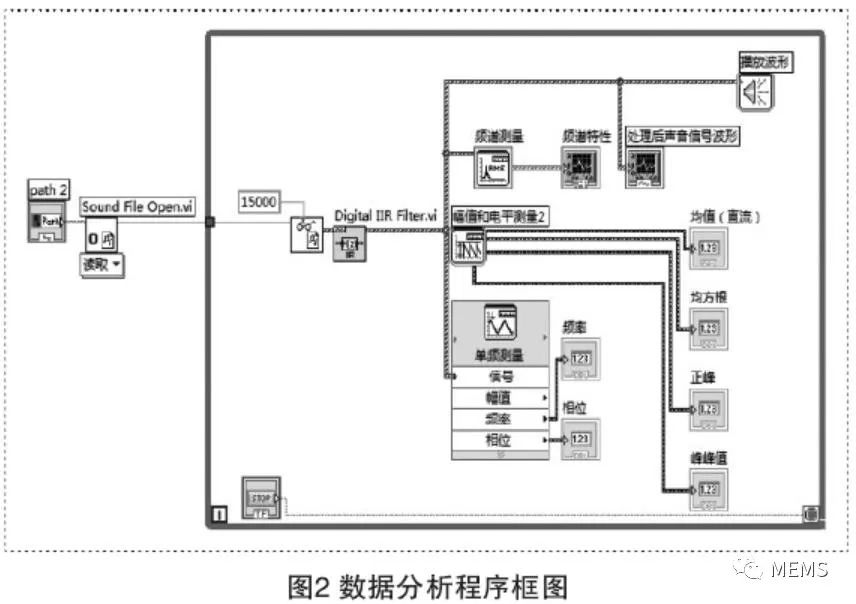
這里使用的濾波器是IIR數字濾波器,其幅頻特性精度很高,是非線性相位,用于對相位信息不敏感的音頻信號上比較合適。之后為了更好的觀察信號的特點,最主要的是對信號進行頻譜變換,這里采用快速傅氏變換(FFT)對信號進行處理。用FFT將信號從時域變換到頻域,使時域隱藏的現象和特征在頻率域內顯示出來,便于分析。而這里用頻譜變換將隨時間變化的音頻信號分解成不同頻率的基本波形,并通過頻譜特征值測量顯示了頻譜的基本信息,幫助我們更好地分析頻譜結構,從而了解發動機運行時的聲音信號狀態特征。
4 實驗結果及分析
系統平臺搭建好后,將發動機轉速調至1檔時,采集發動機發出的音頻信號,經過處理后調試結果如圖3所示;將發動機轉速調至2檔后,發動機轉速加大,再次采集音頻信號,信號處理結果如圖4所示。
由處理后的聲音信號波形圖可以看到原始音頻信號經過濾波后的波形,再將濾波后的信號變換到頻域范圍,可以看到發動機在轉速為1檔時,在頻率約為100Hz時,有最大幅值,也就是最大能量;而在轉速為2檔時,約在180Hz時,有最大幅值。推測該發動機故障容易在這些頻率點出現,故障頻率集中在低頻處,所以可主要對發動機低頻段的狀態進行監測;而高頻段非常平緩,推測此時發動機處于正常運行狀態。
由實驗結果還可以看出,在不同轉速下,同一發動機發出的聲音信號頻譜的均方根值基本不變,這可以作為正常狀態監測的特征量之一。
5 結論
本次設計的基于拾音器的發動機狀態監測系統,主要由MEMS麥克風、單片機等器件組成,是典型的軟硬件結合系統,實現了根據音頻信號對發動機狀態進行分析監測的功能。而采集發動機的聲音信號,相比于采集振動信號、液壓信號等方式更容易,且損耗小、成本低,發展前景廣闊。
-
芯片
+關注
關注
456文章
51099瀏覽量
426000 -
發動機
+關注
關注
33文章
2495瀏覽量
69549 -
監測系統
+關注
關注
8文章
2750瀏覽量
81440
原文標題:基于MEMS麥克風的發動機狀態監測系統
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
國產優秀替代_APM32F407替代STM32F407記錄
STM32F407 DCMI攝像頭源碼

【STM32F407開發板用戶手冊】第14章 STM32F407的電源,復位和時鐘系統
STM32F407芯片介紹
【STM32F407開發板用戶手冊】第8章 STM32F407的終極調試組件Event Recorder





 工商網監
工商網監
評論