") 如何在車輛行駛時(shí)準(zhǔn)確的測量加速度
如何在車輛行駛時(shí)準(zhǔn)確的測量加速度
現(xiàn)代車載數(shù)字視頻記錄系統(tǒng)(DVR)或OBD均使用加速度計(jì)(重力傳感器)測量車輛加速度。因此,在發(fā)生車輛緊急剎車或碰撞等預(yù)定義事件時(shí),DVR可以對記錄視頻添加日期/時(shí)間/加速度等信息。
將視頻保存至硬盤或SD卡等系統(tǒng)存儲器時(shí),這些信息非常有用。例如,可以借助這些信息方便識別和回放目標(biāo)事件視頻。此外,僅保留這些有用視頻并刪除其他視頻可顯著節(jié)約系統(tǒng)存儲空間。但是,由于地球引力偏置和車輛振動等對加速度計(jì)的共同影響,因此在車輛行駛時(shí)準(zhǔn)確測量加速度是一個(gè)很大的挑戰(zhàn)。
本文介紹了一種簡單有效的方法來解決此問題。
圖1所示為一種車載DVR系統(tǒng)框圖。來自CMOS傳感器的視頻經(jīng)提取、處理并最終保存在SD卡或硬盤等獨(dú)立存儲器上。如藍(lán)色高亮部分所示,加速度計(jì)(例如ADXL313)用于測量車輛加速度。
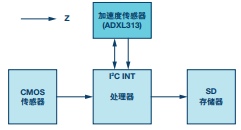
圖1. 車載DVR系統(tǒng)框圖
圖2說明了配備加速度計(jì)的DVR系統(tǒng)的工作原理。發(fā)生急剎車等預(yù)定義事件時(shí),加速度會隨著車輛的速度變化而大幅提升或降低。加速度計(jì)將檢測并測量此加速度,MCU/處理器則可捕捉并處理此加速度數(shù)據(jù)。一旦加速度超過預(yù)定義的閾值(例如–1.5 g),DVR系統(tǒng)便會開始對記錄視頻添加日期/時(shí)間/加速度值等信息。
圖2. 車輛急剎車時(shí)加速度及速度與時(shí)間的關(guān)系
在實(shí)際情況中,地球引力偏置和車輛振動等引起的失真會使加速度計(jì)測得的加速度并不能準(zhǔn)確反映實(shí)際的車輛加速度。很多情況會引入地球引力偏置。例如,當(dāng)DVR安裝在后視鏡上時(shí),由于乘客可手動調(diào)整鏡面角度,因而鏡面和地球引力的夾角是不確定的。另一個(gè)例子是車輛正在并非完全水平的道路上行駛。此外,車輛發(fā)動機(jī)和高低不平的路面狀況造成的振動會隨機(jī)影響加速度測量,從而產(chǎn)生誤差。
表1. 地球引力偏置引入加速度測量誤差

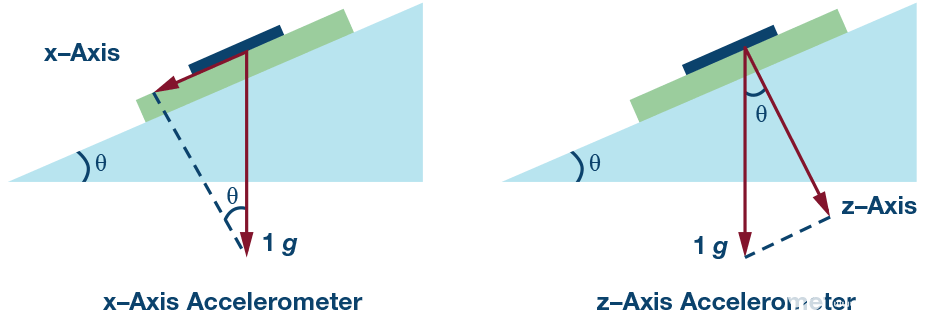
表1表明,地球引力偏置可能引入的誤差是非常顯著的。第一列是相對于地平面的路面傾角;第二列是Z軸上由地球引力引入的傳感器偏置;第四列是Z軸上由傳感器測得的加速度。車輛的加速度為1 g時(shí),在Z軸上測得的加速度隨路面傾角增大而增大,如第四列所示。例如,傾角為15°時(shí)測得的加速度約為1.26g,而Z軸上的實(shí)際加速度為1 g,因而測量誤差約為26%。
圖3所示為加速度計(jì)測得的實(shí)際加速事件,此加速度輸出耦合了引力偏置和車輛振動等。在此圖中,藍(lán)線代表加速度計(jì)測得的加速度,黃線代表由地球引力引入的引力偏置。如圖所示,可觀察到三個(gè)峰值點(diǎn):A、B和C。
A點(diǎn)測得的值約為1.25 g,B點(diǎn)測得的值約為2.25 g,C點(diǎn)測得的值約為1.75 g。將閾值預(yù)定義為1.5 g,B點(diǎn)和C點(diǎn)均超過閾值,而A點(diǎn)則低于閾值。但是,事實(shí)上此結(jié)果是錯(cuò)誤的,因?yàn)榧铀俣扔?jì)上的引力偏置未得到補(bǔ)償。如圖中紅色高亮部分所示,消除引力偏置影響后,A點(diǎn)的實(shí)際加速度約為1.5 g,B點(diǎn)約為2 g,C點(diǎn)約為1.25 g。此例中閾值預(yù)定義為1.5 g,A點(diǎn)和B點(diǎn)均超過閾值,而C點(diǎn)則低于閾值。
此例清楚表明,引力偏置會在測得的加速度上引入誤差,從而導(dǎo)致系統(tǒng)做出錯(cuò)誤決定。在實(shí)際情況中,引力偏置和振動均無法預(yù)測,因而其引入的測量誤差也無法預(yù)測。從無法預(yù)測失真的數(shù)據(jù)中提取實(shí)際加速度是一個(gè)相當(dāng)大的挑戰(zhàn)。
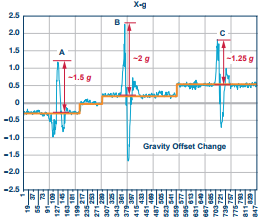
圖3. 耦合了引力偏置和車輛振動的加速度輸出數(shù)據(jù)
但是,使用自適應(yīng)參考基準(zhǔn)的方法可自適應(yīng)地消除引力偏置和振動等引入的誤差。它會實(shí)時(shí)監(jiān)控加速度計(jì)的數(shù)據(jù),并將任何隨時(shí)間出現(xiàn)的較小和緩慢變化的數(shù)據(jù)視為由引力偏置和振動等引入的誤差,如圖3中的黃線高亮部分所示。真實(shí)的加速度隨時(shí)間表現(xiàn)為較大和快速的變化,因而可被確認(rèn)并通過消除引力偏置和振動等引入的誤差從測得的數(shù)據(jù)中提取,如圖3中高亮顯示的脈沖A、B和C所示。
在每個(gè)測量周期,加速度計(jì)會測量并保存數(shù)據(jù),并以此用作下一周期計(jì)算的參考值。在下一測量周期,將把測得的數(shù)據(jù)與前一周期的參考值進(jìn)行相減計(jì)算,然后把結(jié)果數(shù)據(jù)與預(yù)定義閾值進(jìn)行比較。如果結(jié)果數(shù)據(jù)超過預(yù)定義閾值,則將其視為較大和快速的加速度變化,并用系統(tǒng)軟件進(jìn)一步處理判斷。如果結(jié)果數(shù)據(jù)未超過閾值,則將其視為由引力和振動引入的偏置和噪聲,系統(tǒng)軟件不做處理,只是將此次測得的數(shù)據(jù)作為下次測量計(jì)算的參考。測量周期需要微調(diào)以達(dá)到在不同環(huán)境下都能進(jìn)行準(zhǔn)確的加速度檢測。上述過程可用下式表示:
ABS [gn – gn – 1] > gth
其中
gn = 當(dāng)前測量周期中測得的g數(shù)據(jù)
gn – 1 = 前一周期中測得的g參考值
gth = 預(yù)定義的g閾值
圖4表示消除了引力和振動引入的誤差后計(jì)算出的實(shí)際加速度。如圖中所示,現(xiàn)在黃線接近于零,這意味著幾乎消除了所有重力偏移和振動。A點(diǎn)、B點(diǎn)和C點(diǎn)能準(zhǔn)確反映實(shí)際的加速度。
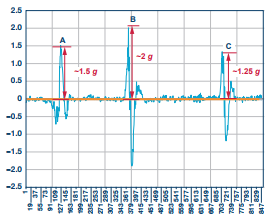
圖4. 運(yùn)用自適應(yīng)參考基準(zhǔn)后方法后獲得的準(zhǔn)確加速度
一般而言,上述自適應(yīng)參考基準(zhǔn)方法可以由軟件來實(shí)現(xiàn),但在實(shí)際情況中希望MCU或處理器單用軟件完成此過程不太實(shí)際,因?yàn)橐曨l應(yīng)用為實(shí)時(shí)的,MCU或處理器的資源可能不足。
ADI ADXL313W加速度計(jì)可作為一種解決方案,它具有AC工作模式和內(nèi)置32深度FIFO,這對運(yùn)用自適應(yīng)參考基準(zhǔn)獲得準(zhǔn)確的加速度數(shù)據(jù)很有幫助,即使后臺MCU或處理器資源有限也無影響。AC工作模式可使ADXL313W保存測得的數(shù)據(jù),將其用作下一周期計(jì)算的參考,而內(nèi)置32 FIFO則可使ADXL313W保存最多32字的測量數(shù)據(jù),這兩者可大幅減輕后臺MCU或處理器的負(fù)載。
圖5是ADXL313WAC工作模式的流程圖。激活A(yù) C工作模式后,ADXL313W會自動將之前測得的數(shù)據(jù)作為參考基準(zhǔn)用作下一周期的計(jì)算并與預(yù)定義閾值進(jìn)行比較。如果其超過閾值,則會激活中斷信號,通知MCU或處理器進(jìn)行處理。在此流程圖中,延遲X ms設(shè)為兩個(gè)測量周期之間的間隔時(shí)間,可根據(jù)具體應(yīng)用進(jìn)行微調(diào),以適應(yīng)不同的應(yīng)用場景。
圖5. 利用ADXL313W的AC工作模式準(zhǔn)確計(jì)算加速度的流程圖
圖6是ADXL313W 32 FIFO模式工作的流程圖。啟用32 FIFO模式工作時(shí),ADXL313W最多可將32字的數(shù)據(jù)自動保存在FIFO中,如果FIFO已滿,則會激活中斷信號,通知相應(yīng)的MCU或處理器進(jìn)行處理判斷,處理器一次可以獲得32此測量數(shù)據(jù),從而節(jié)省了處理器的功耗和負(fù)荷。
圖6. 利用ADXL313W FIFO準(zhǔn)確計(jì)算加速度的流程圖
為了以有限的存儲容量記錄目標(biāo)視頻并方便視頻獲取,現(xiàn)代車載DVR或OBD設(shè)備需要準(zhǔn)確檢測并測量加速度。測量誤差主要由地球引力偏置和車輛振動等引入,這些誤差是不可預(yù)測的,這對系統(tǒng)設(shè)計(jì)人員是一個(gè)挑戰(zhàn)。可通過軟件運(yùn)用自適應(yīng)參考基準(zhǔn)的方法來消除此誤差,但在實(shí)際情況中,這可能又不太實(shí)際,因?yàn)镈VR或OBD系統(tǒng)的資源非常有限。
ADI ADXL313W加速度計(jì)具有AC工作模式和內(nèi)置32深度FIFO,這不僅可以直接運(yùn)用自適應(yīng)參考基準(zhǔn)方法,而且還可以大幅減輕后臺MCU或處理器的負(fù)荷。ADXL313W還具有其它很多特性,例如通過車規(guī)認(rèn)證、高分辨率、低噪聲和低功耗,因而能夠大幅提升DVR系統(tǒng)的性能。
-
傳感器
+關(guān)注
關(guān)注
2552文章
51294瀏覽量
755203 -
處理器
+關(guān)注
關(guān)注
68文章
19384瀏覽量
230494 -
存儲器
+關(guān)注
關(guān)注
38文章
7521瀏覽量
164087
原文標(biāo)題:如何準(zhǔn)確捕捉車輛行駛時(shí)的加速度?這個(gè)辦法簡單又有效
文章出處:【微信號:analog_devices,微信公眾號:analog_devices】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
數(shù)字式MEMS加速度傳感器在傾角測量的應(yīng)用
MEMS加速度傳感器在車身穩(wěn)定系統(tǒng)中的應(yīng)用
慣性傳感器在車輛穩(wěn)定系統(tǒng)中應(yīng)用
一種慣性傳感器在車輛穩(wěn)定系統(tǒng)中應(yīng)用
請問三軸加速度傳感器檢測車輛拐彎和碰撞次數(shù)可行嗎?
智能壓阻式加速度傳感器設(shè)計(jì)
請問怎樣用三軸加速度計(jì)檢測車輛的行駛與停止?
基于加速度計(jì)的傾角測量精度提高
Mems加速度計(jì)對于溫度測量是準(zhǔn)確
如何使用加速度計(jì)查找移動車輛的速度?
車輛縱向加速度自抗擾控制
利用加速度計(jì)和陀螺儀測量車輛運(yùn)動
如何使用加速度計(jì)提高傾角測量的準(zhǔn)確性
基于ADXL337的加速度感應(yīng)報(bào)警電路





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論