 自適應巡航是什么?它與定速巡航有區別嗎?
自適應巡航是什么?它與定速巡航有區別嗎?
自適應巡航設計初衷是減輕駕駛員長途駕駛的疲勞,極為復雜的城市路況并不是它發揮作用的地方。雖然現在的自適應巡航系統具備了根據前車情況、根據路況減速,甚至是剎停的功能,不過其開發之初便是為了減少駕駛員高速行車疲勞度,而不是依據主動駕駛功能而開發。換言之,這套系統的減速與剎車停止功能判斷邏輯并不是以應付城市中復雜的低速路況而研發的。請牢記:它只是減低高速行駛時的疲勞感,而非永久解放人雙手的功能!
有人說科技是因為懶人的存在而不斷發展,對于這句話我不置可否。不過科技的不斷進步確實讓很多原本很復雜、無趣的事情變得簡單、有趣。十幾年前的駕駛員聽到要開長距離的高速時,多半都會心中一緊,有經驗的老司機會開始琢磨穿個合腳的鞋。現在,長途駕駛在自適應巡航的幫助下,已經解放了部分駕駛員的雙腳。那么這個能自動達到預設時速并保持預設跟車距離的家伙,是如何做到這一切的?為什么有時候開啟自適應巡航進入彎道會突然加速或減速呢?
在解答上面的問題前,首先需要明白自適應巡航的結構是什么樣的、它的判斷邏輯是什么。明白了結構與原理后,解決實際應用問題會輕而易舉。
自適應巡航是什么?它與定速巡航有區別嗎?
首先要肯定的是自適應巡航與定速巡航是有區別的。科技的發展幫助越來越多的車裝配上定速巡航系統,自適應巡航則是基于定速巡航對于速度的控制,進一步實現對于距離的把握。簡單講,定速巡航要做的只有一件事,那就是達到駕駛員預設的時速要求,而自適應巡航除了達到預設時速外,它還肩負著保持預設跟車距離以及隨著車距變化自動加速與減速的任務。
自適應巡航的歷史
自適應巡航系統的歷史可以追溯至上個世紀70年代。1971年,美國EATON(伊頓)公司便已從事這方面的開發。其雛形是日本三菱公司提出的PDC(PreviewDistanceControl)系統,它將雷達與其他處理器結合在一起,可以偵測出車距變化,并對駕駛員發出警告,系統還可以控制節氣門開度調節發動機功率。此后豐田、本田、通用、福特、戴姆勒、博世等公司也投入到了研發行列。
自適應巡航的結構
總的來講,自適應巡航系統由傳感器、數字信號處理器以及控制模塊三大部分組成。如果用人類做比喻,傳感器就類似于眼睛、耳朵、鼻子等器官,它負責感知前車以及本車確切位置,目前市場上常見的傳感器有雷達傳感器、紅外光束以及視頻攝像頭等幾種。信號處理器負責將傳感器接收到的信息進行數字處理,最后由控制模塊處理收集到的信息進行控制。系統判斷需要減速時,最終由ABS系統對車輪實施制動或者變速箱采用降擋的辦法,將車速降低。
傳感器安裝位置
目前市面上傳感器主要包括雷達傳感器、紅外光束傳感器以及視頻攝像頭三種。品牌、車型不同其安裝位置也不同,常見的安裝位置有車標后、保險杠兩側、下方以及車內后視鏡背后。造成這些差異的原因主要是各種傳感器工作原理不同,當然其中也包含部分成本因素。
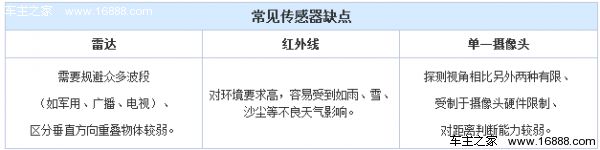
由于每種傳感器都有自己的弱點,所以目前自適應巡航系統開發過程中,研發人員便會根據各種傳感器的特點,將它們組成搭檔,共同為數字信號處理器提供信息。比如雷達對于垂直方向上重疊物體的判斷較弱。在實際行車中,當車輛行駛到立交橋附近時,如果前方與盤橋匝道上同時出現車輛,雷達傳感器有很低幾率出現誤判;前方路面出現金屬標識牌甚至是金屬廢棄物時,雷達傳感器也有很低幾率產生誤判。相信沒人想拿自己的生命做賭注,于是為了進一步降低誤判的可能,越來越多的自適應巡航系統采用兩種傳感器收集信息。
難道這些傳感器除了搭檔合作為數字信號器提供信息外,就沒有其他解決辦法了?當然不是。比如單一攝像頭受到硬件限制較大,對于距離判斷能力較弱,那兩個攝像頭對距離判斷效果又如何呢?在剛剛結束的東京車展上,搭載雙攝像頭傳感器的車型出現在了斯巴魯展臺上,相信工程人員已經能讓它滿足實際使用需求。
自適應巡航系統控制邏輯
本車時速、前車時速、前車與本車距離、旁邊車道是否有車輛進入等等,這些都是自適應巡航這套系統的控制依據。簡單講,這套系統的控制邏輯就是利用傳感器得到行車所用的一切信息,當發現前車減速或發現干擾本車行駛的新目標時,電控單元發送執行信號給發動機或制動系統,做出相關動作。如果發現前方沒有車輛,則恢復設定車速,隨后就是周而復始循環至您關閉功能。
這些內容只是控制邏輯中很少的一部分,現在越來越多配備自適應巡航的車輛可以控制跟車距離遠近,那設置好的跟車距離是否會隨著車速改變而變化?當后車的傳感器無法識別前車時會發生什么?這些問題都是自適應巡航系統控制邏輯需要面對的問題,下一頁的測試項目中,我們就以人肉體驗的方式實踐上述常會碰到的問題。測試前請注意:自適應巡航不等于城市安全系統!
自適應巡航設計初衷是減輕駕駛員長途駕駛的疲勞,極為復雜的城市路況并不是它發揮作用的地方。雖然現在的自適應巡航系統具備了根據前車情況、根據路況減速,甚至是剎停的功能,不過其開發之初便是為了減少駕駛員高速行車疲勞度,而不是依據主動駕駛功能而開發。換言之,這套系統的減速與剎車停止功能判斷邏輯并不是以應付城市中復雜的低速路況而研發的。請牢記:它只是減低高速行駛時的疲勞感,而非永久解放人雙手的功能!
實測自適應巡航系統
如何開啟自適應巡航?如何確定已開啟自適應巡航?
這兩個問題看似容易,其實不然。買車的時候或許十分看重是否有這項配置,不過真到了用車的時候幾乎從未開啟的大有人在。究其原因,不知道怎么辨別是否開啟是其中的原因。由于廠家不同,具體的操作按鈕有所區別。
開啟自適應巡航系統比把大象塞入冰箱還簡單,首先打開定速巡航系統,并設置好所需時速。第二步按下自適應巡航按鈕,并選擇跟車距離。第三步就是用余光快速檢查下儀表盤,看看有無標志提示。確定沒有問題后,就可以享受它帶來的便利了。
自適應巡航系統會通過傳感器掃面前方路面情況,在前方無車情況下,到達您預設時速。前方出現車輛,則按照您預設跟車距離行駛。如果前車速度比您預設速度低,則自適應巡航系統只會按照您預設距離行駛,如果前方車輛比您預設時速高,自適應巡航系統也不會“盲目跟進”,超過您的預設時速。總之,這套系統就是在保證距離的情況下,按照您設定的時速前進。
相比開啟,自適應巡航的關閉則簡單的多,只要您踩下制動踏板,自適應巡航系統就會自動解除,當然您也可以使用按鍵手動關閉。如果想要再次激活,您只需按下調節車速按鍵。
城市路況中使用自適應巡航會遇到的問題
目前很多自適應巡航都可以設置不同遠近的跟車距離,根據測試,不同時速下相同檔位的跟車距離是不同的,這是因為車輛時速越快,需要剎停的距離就越長,比如100km/h時速下,最近跟車檔位遠比50km/h時速下設置的最近跟車擋位遠。
如果在城市道路行駛時使用自適應巡航功能,即便將跟車距離調至最近檔位,本車與前車之間的距離仍會十分寬敞,足夠旁邊車道車輛自由并線。在城市路況中,想通過設置最近跟車距離而不被旁邊車道車輛亂并線的朋友,你們要失望了。
日常行車時為什么車輛會突然加速或減速?
在日常行車時,開啟自適應巡航的車輛為什么有時候會突然加速或減速?這是因為在前方無車的情況下,即便是開啟自適應巡航功能,車輛也只是執行定速巡航功能,在這種情況下,當發生以下情況時,車輛有可能在自適應巡航控制下自動減速。
★旁邊車道車輛并入本車車道試驗
首先進行旁邊車道車輛進入本車道的試驗。可以看到在下圖的①-④階段,開啟自適應巡航的車輛與進入本車道的車輛距離在逐漸縮小,很明顯此時系統還是判斷前方無車,所以它執行的是達到駕駛員預設時速的判斷邏輯。當⑤時,也就是旁邊車道車輛幾乎整個車身并入本車道時,我們的車輛采取了減速。
★本車并入旁邊車道試驗
在第二個試驗中,開啟自適應巡航的車輛并入旁邊車道,同樣是①-④的階段,即使本車并入旁邊車道的車身面積不斷增加,不過本車依舊判斷前方為無車階段,車距在不斷接近。圖⑤的階段系統已經判斷到與前車距離過近,圖⑥階段,本車已經在自適應巡航系統作用下完成減速,與前車保持設置的跟車距離。
前車進入大角度的彎道,開啟自適應巡航的本車會如何?
在開啟自適應巡航功能并處于跟車狀態下,當前車進入彎道后,開啟自適應巡航系統的后車會采取什么措施呢?這會分為兩種情況,第一種情況:傳感器掃描不到前車,即會執行到達預設時速的邏輯。第二種情況:此時正好旁邊車道有車拐彎,傳感器會將其誤認為是本車道前車,此時會判斷為跟車距離不夠,就會對車輛實施減速。
直線行駛時,自適應巡航也會“突然”加速?
在直線行駛開啟自適應巡航時,前車并入其他車道,這時本車雷達會重新掃描前方車輛,如果判斷沒有前車則自適應巡航會執行駕駛員設定的目標時速,如果判斷有前車存在,則自適應巡航執行駕駛員設定的行駛。特別是時速不高調整跟車距離的過程中,這種加速感就會比較明顯。
自適應巡航的未來
隨著科技的發展,自適應巡航系統也在不斷進化。多傳感器協同合作、判斷邏輯更加智能將幫助自適應巡航系統更“聰明”。譬如部分奧迪車型搭載的自適應巡航系統,在車輛進入彎道時,處理模塊將傳感器收集到的信息與車道保持系統收集到的信息一同判斷,規劃出車輛的行駛軌跡。這樣就可以掃描到前面轉彎的車輛,避免突然加速或減速的情況。
讓我們將眼光再放長遠一點,自適應巡航的未來將不僅只在高速行駛時減輕駕駛員的疲勞。如果能將城市安全系統、自適應巡航系統、地圖導航等系統進行有效結合,那么,距離實現自動駕駛也就不遠了。
全文總結
我十分喜歡“科技發展的最高境界就是讓人感覺不到科技的存在”這句話,若干年前,在實驗場里實現自適應巡航的實驗車還背負著巨大的傳感器,車內還布置著眾多線束。很難想象到若干年后的今天它們可以如此貼近我們的生活。今年的8月全新一代奔馳S級已經依靠自動駕駛功能從斯圖加特行駛到了法蘭克福,這次誰也不會懷疑它不久后就會走入我們的生活。雖然這些科技給人們帶來越來越多的便利,不過現階段看,保證行車安全性最重要的仍是操作者自身。
-
傳感器
+關注
關注
2551文章
51099瀏覽量
753570 -
雷達
+關注
關注
50文章
2936瀏覽量
117532 -
數字信號
+關注
關注
2文章
970瀏覽量
47550
原文標題:詳細解讀什么是自適應巡航?
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
談談ACC自適應巡航技術的優缺點
請問怎么用單片機實現定速巡航?
客車用定速巡航系統
詳細剖析ACC自適應巡航系統
詳細介紹凱迪拉克超級巡航系統
奔馳車定速巡航失控狂奔百公里

ACC自適應巡航技術——自動駕駛
自適應巡航是什么
汽車自適應巡航控制系統(ACC)技術詳解
自適應巡航控制系統的工作原理及應用
汽車定速巡航怎么使用
自適應巡航系統的組成及原理





 工商網監
工商網監
評論