 通過采用驅動器板實現機器人控制
通過采用驅動器板實現機器人控制
您已根據視頻源、其它傳感器、項目目標和應用細節的輸入,確定了機器人手臂的軌跡和位置。 剩下只有一個問題——即將所需的目標位置轉換為特定指令,以需要的加速度、速度和減速度驅動手臂的電機,使其在沒有過沖和任何電氣問題的情況下(如果存在機械故障)順利到達終點。
將來自系統處理器的低電平數字信號轉換為電機本身具體的詳細指示,是一個需要多方位考慮的過程。 此外,這些數字信號不具備電機通常所需的高電壓和高電流。 因此,在實際電機的指令和控制之間需要一系列的控制和轉換級(圖 1)。
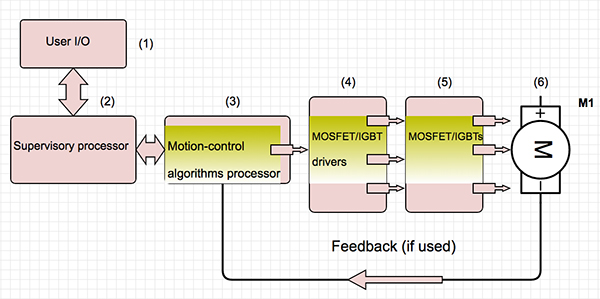
圖 1:完整的電機控制信號路徑由數字和處理器功能(1、2、3)以及需要截然不同設計專長的模擬和電源電路(4、5)構成,具有復雜的技術要求。 (使用 Digi-Key Scheme-it 繪制的原理圖)
其中的中間級是調用總體任務(“將杯子從 A 移動到 B 并清空內容物”)的用戶 I/O(框 1)與實際執行工作的電機(框 6)之間的關鍵路徑。 具體包括:
將高級目標轉換為一個或多個電機的“向前移動機械臂 2 英寸,順時針旋轉 180 度,然后停止”(框 2)等具體步驟的監控處理器;
運動控制算法處理器(框 3)。 該處理器定義了如何根據加速度和加速時段、行進速度、減速度和減速時段以及終點等所需的運動軌跡因素完成每個步驟。 然后確定如何驅動電機線圈,并執行這些細節。 此外,可用一個處理器為多個電機執行此操作,尤其是當它們的動作相互關聯時。
來自 (3) 的低電平數字信號然后進入 MOSFET/IGBT 驅動器(框 4),它可提供打開/關閉電源開關 MOSFET/IGBT 所需的特定電壓和電流。 這些驅動器是輕松的低電平數字信號與棘手的高功率管理功能之間的接口。 這些驅動器必須與 MOSFET/IGBT 所需的電壓、電流、壓擺率以及開/關時段等獨特驅動參數相匹配,并且還要適應 MOSFET/IGBT 可能遇到的開關瞬態、過熱、甚至短路等常見問題。
然后,電源開關(MOSFET 或 IGBT)以電機所需的電流/電壓水平(框 6)控制進入電機線圈的電流(框 5)。 請注意,許多但并非所有應用還需使用電機提供的某類傳感器反饋(霍爾效應傳感器、編碼器、旋轉變壓器),以告知處理器該電機的實際情形;而有些算法,如磁場定向控制 (FOC),不需要此類反饋,但需要進行額外的計算并可能降低精度。
根據電機和應用的情況,電壓可以是個位數、兩位數或更高,而電流范圍則從幾百毫安到幾十安及以上。 MOSFET/IGBT 驅動器必須與其 MOSFET/IGBT 相匹配;反之,MOSFET/IGBT 也必須匹配該電機。
有許多不同的電機類型可供使用,包括步進電機、無刷直流電機 (BLDC) 或 A 感應電機,每種電機都具有獨特的屬性和應用場合。 雖然沒有關于電機類型及其最適合應用的絕對指南,但步進電機通常用于需要精確起停動作的較低功率水平;BLDC 電機適用于低/中功率范圍,尤其是需要連續旋轉(和運動)的場合;而交流感應電機通常成本最低,但精度和可重復性也較低。
該解決方案的分割
盡管圖中方框 2 - 5 執行的功能是單獨顯示的,實際上它們可通過各種方式進行組合,具體取決于系統的功率水平和性能要求。 其可能性包括:
監控處理器 (2) 的功能和運動控制算法處理器 (3) 的功能可由一個 CPU 完成。 一般而言,此做法僅在處理器相當強大時才可行,這是因為算法通常很復雜且需要大量的實時計算。
運動控制算法處理器 (3) 和 MOSFET/IGBT 驅動器 (4) 可位于一塊印刷電路板上。 當目標電機是單一尺寸和類型,而不是一個系列,并且使用的 MOSFET/IGBT 也是單一尺寸時,此做法是極具吸引力的解決方案。 由于運動控制算法處理器可能是高耗散的 IC,且驅動器也是耗散相對較高的裝置,因此還需要考慮散熱。
最后,MOSFET/IGBT 驅動器 (4) 和 MOSFET/IGBT (5) 可位于一個電路板上,作為處理器 (3) 和電機負載 (6) 之間的接口。 這是一種常用配置,因為該組合通常可作為“替代解決方案”,解決高速、低電平數字信號的轉換難題、電機接口的現實難題以及任何電機帶來的諸多問題等。
由于大多數機器人應用都是多軸,具有多個自由度(通常三到六個),因此部分驅動器板被設計為支持多個電機。 通過這種方式,算法處理器可通過一個接口向電機提供控制方向。
最佳的方法是什么? 正如所有的工程設計決策一樣,您需要基于許多因素進行權衡:易用性、設計風險、上市時間、靈活性、適應性、安裝和成本以及性能等。 許多用戶選擇集成式解決方案(模塊或印刷電路板),將 MOSFET/IGBT 驅動器與 MOSFET/IGBT 本身組合在一起。 使用此方法可最大程度減小對于大多數設計人員而言最具風險和最具挑戰性的因素,確保驅動器兼容其控制的 MOSFET/IGBT 開關元件。
此外,它還可讓用戶專注于算法及低電平數字電路接口,以及特定應用中不可避免的瑣碎細節。 無論是作為模塊、印刷電路板還是廠商參考設計,這些驅動器和 MOSFET/IGBT 的組合可謂是設計團隊快速推進項目并專注于應用性能的最快方式。
上述組合平臺還集成了大多數或者所有電路細節,如短路保護、欠壓鎖定和過熱關斷等,這是一個設計精良的電機驅動電路實現安全性和可靠性所需要的。 此外,通過在處理器和電機之間使用不同的中間板,該組合方法還可在使用相同處理器和軟件的同時輕松支持一系列不同的電機尺寸。
用戶選擇范圍廣泛
用戶可使用各種各樣的驅動器和 MOSFET/IGBT 配對來處理各種電機類型和需求。 其目的在于簡化設計難度,進而讓設計團隊專注于應用的固件及其不可避免的特性。
我們用一些例子說明其中的要點。 對于中高功率水平的 AC 電機,如家用電器(洗衣機、冰箱、空調、縫紉機),不妨選擇 STMicroelectronics 的 SLLIMM?(小型低損耗智能集成模塊)元件。
這些集成式電源模塊 (IPM) 設計用于三相逆變器,額定值為 8 A/600 V。模塊包含了三個用于標準逆變橋配置的 IGBT,由隔離的高壓側和低壓側驅動器進行控制,因此用戶不需要提供隔離(隔離不僅涉及到更多的元件和成本,而且需要滿足嚴格的監管要求)。
簡化型 SLLIMM 框圖(圖 2)無法顯示裝置的實際復雜度。 應用原理圖(圖 3)則更加清晰,它顯示了用戶僅需要添加少數低成本的電容器和部分電阻;所有其他必要元件,如軟恢復二極管、電平位移器、隔離和保護,都嵌入在模塊中,并且對用戶透明。
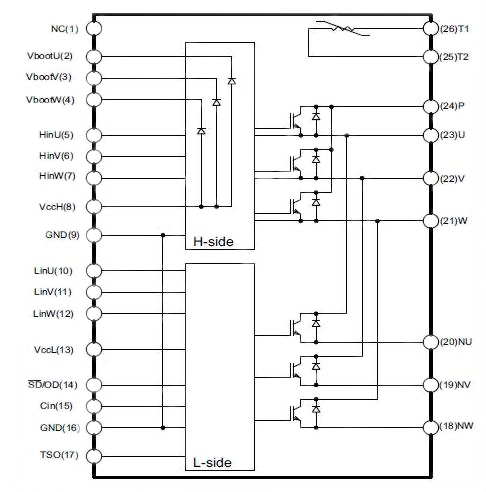
圖 2:通過借助 IGBT,將幾乎所有的控制較高功率交流感應電機的電路,集成到帶有強制電流隔離的封裝模塊中,STMicroelectronics SLLIMM 將這種高電壓難題轉換為中等難度的項目。 (圖片來源:STMicroelectronics)
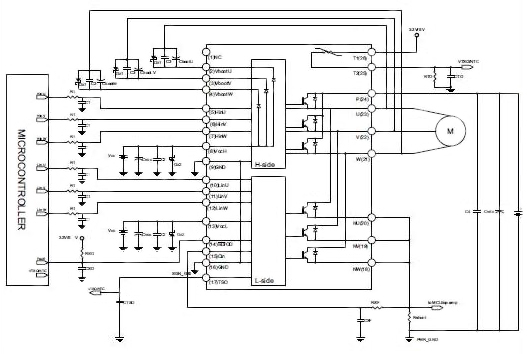
圖 3:SLLIMM 是低電平微控制器和交流感應電機之間近乎完整的接口,只需要低成本、非關鍵的無源元件(大多數為電容器、部分為電阻、沒有電感器)即可實現最終的安裝。 (圖片來源:STMicroelectronics)
此模塊的輸入是標準的 3.3/5 V TTL/CMOS 信號,然而它可根據運行、安全性及監管要求的需要,在這些輸入和功率輸出之間提供 1500 V 的隔離。 盡管額定功率相當高,但模塊尺寸小巧,約 38 mm 長、25 mm 寬,僅 3.5 mm 厚。
對于含多個 BLDC 電機的應用,不妨了解 Cypress Semiconductor 的 CY8CKIT-037 PSoC 4 電機控制評估套件,它可通過在常用 H 橋配置中布置的 MOSFET,處理最多四個電機(圖 4)。 這些電機可以是永磁同步電機 (PMSM)、步進電機和無刷直流 (BLDC) 電機。 該套件旨在通過 Arduino 微控制器板進行驅動,并允許用戶實現并評估電機控制算法。
圖 4:Cypress Semiconductor 的 CY8CKIT-037 PSoC 4 電機控制評估套件包括運動控制項目所需的一切,包括電源、電機、電纜,甚至螺絲刀。 (圖片來源:Cypress Semiconductor)
驅動器板(圖 5 和圖 6)與電機相連;它包含 DC/DC 電源電路、雙 H 橋電路、電機電流及總線電壓采樣與處理電路、保護電路、用戶配置電路以及控制器板連接器。
關聯的 CY8CKIT-042 控制器板將從 Arduino 板接收信號,執行控制策略的算法,然后生成驅動器板的控制信號,實現對電機的控制。 此外,該套件還支持使用霍爾效應傳感器提供的反饋,為控制器更新電機的實際位置(以及速度和加速度),實現密閉的閉環性能。但是,該套件也可與無傳感器的 FOC 設計配合使用。
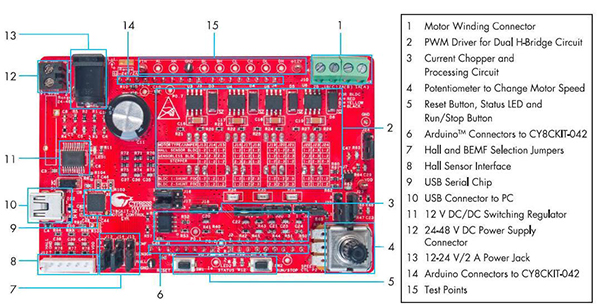
圖 5:CY8CKIT-037 驅動器板配有全部連接器(以及方便互聯的螺紋端子)、USB 接口、霍爾效應反饋傳感器接口以及 Arduino 接口,所有器件均易于連接使用。 (圖片來源:Cypress Semiconductor)

圖 6:CY8CKIT-037 驅動器板框圖顯示了其為 Arduino 型微控制器板和電機之間的完整接口提供的諸多功能,包括管理 H 橋電機以及提供位置反饋(如果需要)。 (圖片來源:Cypress Semiconductor)
SparkFun 的 Big Easy 驅動器 ROB-12859 是一款用于電機的額定值為每相位 1.4 - 1.7 A、通過適當散熱可達到 2 A 的步進電機驅動器板(圖 7),支持并推動著采用低功率步進電機的應用趨勢。 該驅動器板的核心是 Allegro A4988 步進電機驅動器 IC,它支持全步模式以及 1/2、1/4、1/8 和 1/16 步的微步進控制。
圖 7:SparkFun 的 Big Easy 驅動器 ROB-12859 采用 Allegro A4988 IC 作為其核心元件,可對額定電壓在 30 V 以內的中/小功率步進電機進行控制。 (圖片來源:SparkFun)
關聯的微控制器板(如 Arduino)和 Big Easy 驅動器之間的互連十分簡單。 它只需要該板提供兩個控制信號(一個用于“步進”,一個用于“方向”),并生成啟動和步進驅動電機的定時功率信號,這樣可最大程度地降低微控制器的處理負載。 它可接受高達 30 V 的最高電機驅動電壓,并含有板載 5 V/3.3 V 穩壓器,因此僅需一個外部電源。
結論
對于許多設計團隊而言,為機器臂或類似應用開發運動/電機控制解決方案的挑戰和挫折在于如何實現數字電路和目標電機之間的接口。 而該工作需要不同的設計專長來處理各種功率水平(電流和電壓)、模擬問題、布局限制、電路保護功能,實際電機與其 MOSFET/IGBT 之間的兼容性以及 MOSFET/IGBT 與其驅動器之間的兼容性等。
幸運的是,設計人員現在有較大的選擇余地,極大簡化了這一問題。 設計人員可通過多個來源獲得提供基本接口功能以及必要安全和保護元件的、適合不同功率水平和電機類型的模塊和印刷電路板。
-
傳感器
+關注
關注
2552文章
51325瀏覽量
755370 -
驅動器
+關注
關注
53文章
8264瀏覽量
146732 -
機器人
+關注
關注
211文章
28578瀏覽量
207778
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論