") 采用不同的方法實現(xiàn)電機(jī)控制
采用不同的方法實現(xiàn)電機(jī)控制
與電機(jī)連接的嵌入式系統(tǒng)的要求和復(fù)雜程度各不相同。簡單的應(yīng)用僅僅接合和脫離電源并且可能反轉(zhuǎn)極性以反轉(zhuǎn)電動機(jī)方向。然而,在實踐中,很少有設(shè)計那么簡單。相反,速度,加速度,電機(jī)位置以及負(fù)載和扭矩感應(yīng)是現(xiàn)代設(shè)計的更典型要求。
電機(jī)本質(zhì)上是電感式的,它們可能會對突然的負(fù)載進(jìn)行反應(yīng),應(yīng)用不同的驅(qū)動波形,以及意外的更高電流消耗齒輪問題或卡紙情況(如打印機(jī)中的卡紙)。
包括MCU和驅(qū)動器的電機(jī)控制平臺和套件可用于旋轉(zhuǎn)各種類型的電機(jī),包括交流感應(yīng)電機(jī)(ACIM),無刷(BLDC),步進(jìn)電機(jī),永磁(PMSM),通用,開關(guān)磁阻,和更多。應(yīng)該注意的是,幾乎在所有情況下都需要外部驅(qū)動器,因為通常MCU的I/O線路沒有驅(qū)動器。
由于所有這些原因,電機(jī)控制帶有許多其他嵌入式設(shè)計所沒有的特殊要求。這包括芯片上的外圍設(shè)備,用于驅(qū)動,切換和測量電機(jī)的功率電平。還需要外圍設(shè)備來感測電機(jī)狀況。本文著眼于微控制器可以與電機(jī)連接以實現(xiàn)精確控制和電機(jī)狀態(tài)提取的方法。
實用功能
幾乎所有微控制器都可以驅(qū)動和控制電機(jī); I/O,定時器,A/D和D/A是非常標(biāo)準(zhǔn)的,據(jù)了解,您將使用外部電路來完成繁重的工作。 MCU在正常條件下能夠很好地感應(yīng)和控制。但是,有一些很好的功能,微型可以提供電機(jī)控制,推動他們超越標(biāo)準(zhǔn)功能。
例如,在許多應(yīng)用中,電動機(jī)將受到不同載荷和應(yīng)力的驅(qū)動。電流和應(yīng)變傳感器可用于查看電機(jī)的情況。提供集成模擬比較器的微控制器可以在超過閾值電平時產(chǎn)生中斷,其響應(yīng)速度比使用A/D級每隔一段時間輪詢一次的通用MCU要快得多。另一點是,快速而堅決的A/D級對于監(jiān)控和驗證正常運行條件特別有用。類似地,良好的D/A級(或PWM)對于可變電壓驅(qū)動電機(jī)可能是重要的,其轉(zhuǎn)矩和速度可以通過改變驅(qū)動電壓來指導(dǎo)。快速中斷響應(yīng)時間和喚醒時間也很重要。
一旦你擁有一個可靠而強(qiáng)大的驅(qū)動和感知機(jī)制,現(xiàn)在它就成了一個過濾過程,可以找到最適合工作的微觀過程。
滿足電機(jī)控制要求
了解電機(jī)控制的特殊需求,多家MCU制造商結(jié)合了特定的功能和特性,創(chuàng)建了針對電機(jī)應(yīng)用的專用電機(jī)控制微控制器或微控制器。采用AtmelAVR?系列,特別是ATXMEGA16D4-MHR,其定時器/計數(shù)器內(nèi)嵌有高級波形擴(kuò)展(AWeX)功能。它可以實現(xiàn)具有死區(qū)插入的低端和高端輸出以及故障保護(hù),以在達(dá)到故障檢測參數(shù)時非常快速地關(guān)閉外部驅(qū)動器。
內(nèi)部時鐘的使用允許比標(biāo)準(zhǔn)外設(shè)時鐘高出四到八倍的時序分辨率,還有助于在損壞之前檢測可能出現(xiàn)的電路故障故障。另一個不錯的電機(jī)控制功能是能夠在端口引腳上生成同步位模式。這有助于多個電動機(jī)或具有時間驅(qū)動的單個電動機(jī)的同步。例如,打印機(jī)可能希望在電機(jī)移動到非常特定的位置后的特定時間啟用其噴墨器。
展示了如何使用低成本處理器驅(qū)動和控制12 V,三相,無傳感器,磁場定向控制(FOC)8極永磁電機(jī)和USB橋(圖1)。可以在Digi-Key網(wǎng)站上找到XMEGA?系列的產(chǎn)品培訓(xùn)模塊介紹。
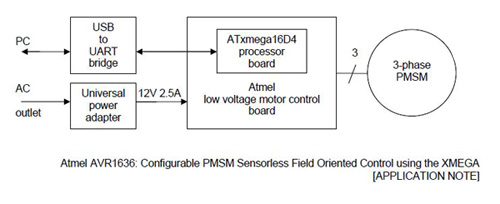
圖1:專用的AVR micro使得從USB端口編程和控制三相電機(jī)變得簡單。
Zilog是另一家使用ZNEO?CPU直接使用Z16FMC系列進(jìn)行電機(jī)控制的制造商。例如,考慮采用16位Z16FMC64AG20SG,它具有集成模擬比較器,運算放大器,12源A/D和靈活的PWM級。片上調(diào)試器有助于開發(fā)。監(jiān)視器,故障檢測,掉電檢測和兩種不同類型的復(fù)位等標(biāo)準(zhǔn)功能使程序員工具可以進(jìn)行主動故障恢復(fù)和管理。向量中斷和優(yōu)先級劃分對減少響應(yīng)時間也很有用。
一個特別好的特性是PWM狀態(tài)邏輯的極性控制的關(guān)閉狀態(tài)故障回退(圖2)。它使用主定時器生成調(diào)制器的時基和6個獨立的比較寄存器,為每個輸出設(shè)置PWM。插入可編程死區(qū)時間,以確保功率晶體管和H橋驅(qū)動器永遠(yuǎn)不會以重疊波形同時驅(qū)動。
Zilog在Digi-Key網(wǎng)站上提供Z16FMC電機(jī)控制培訓(xùn)模塊。
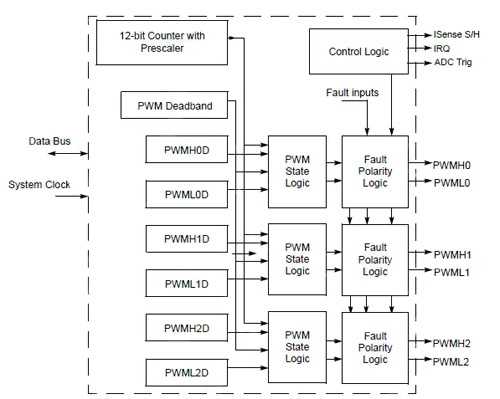
圖2:為滿足集成和電機(jī)特定要求,Zilog電機(jī)控制MCU內(nèi)部的PWM級包含用于差分三相驅(qū)動的專用狀態(tài)邏輯以及故障保護(hù)和死區(qū)時間邏輯。
外圍方法
幾家半導(dǎo)體公司為特定類型的電機(jī)提供外圍式控制器。 IXYS IXDP630PI全面負(fù)責(zé)三相正弦換向無刷,感應(yīng)或交流伺服類型的電機(jī)。這取代了在邏輯中實現(xiàn)此功能所需的六個分立IC。
其關(guān)鍵功能是在有效開關(guān)時間之間插入所需的死區(qū)時間,以防止可能導(dǎo)致H橋設(shè)計中的短路情況的重疊驅(qū)動波形。雖然大部分邏輯和功能已經(jīng)遷移到微控制器的I/O部分,但仍然使用離散和專用電機(jī)控制IC。
像Microchip MTD6505T-E/NA這樣的部件非常有趣。這里嵌入式專用小型MCU安裝在芯片上,實現(xiàn)了三相電機(jī)接口電路(圖3)。小巧的DFN 10引腳封裝足夠小,可以安裝在電機(jī)附近,微型可以數(shù)字控制速度和方向。雖然內(nèi)部有三相H橋,但它需要為更大的電機(jī)驅(qū)動更多肉質(zhì)的動力元件。
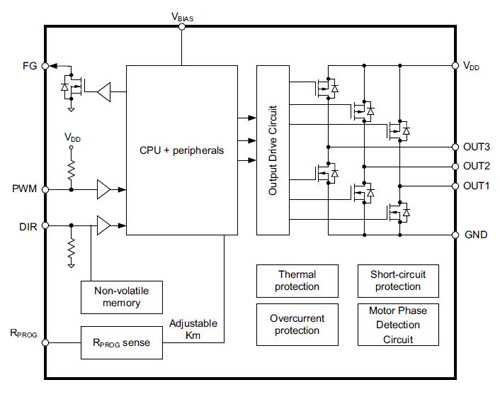
圖3:用于正弦三相無傳感器和無刷電機(jī)的專用微型接口和控制電路緊湊地安裝在3 x 3 mm 10引腳DFN封裝中。
邁向正確方向的步驟
步進(jìn)電機(jī)是常用的,也有專用MCU可以定位的特殊需求。步進(jìn)器可以是非常小的低功率,如儀表板儀表中使用的埋入式電機(jī),或者非常大和當(dāng)前饑餓,如X-Y表等離子切割機(jī)中使用的那些。需要更高的電壓來提供更高水平的功率。
對于這些應(yīng)用,請仔細(xì)查看Allegro A4915METTR-T,它可以在高達(dá)50 V的電機(jī)下運行。設(shè)計用于三相無刷直流電機(jī)的PWM驅(qū)動電流控制,它包括六個大電流N - 通道功率MOSFET,在其狀態(tài)邏輯中具有制動控制系統(tǒng)(圖4)。有關(guān)更多信息,Digi-Key和Allegro提供了一個產(chǎn)品培訓(xùn)模塊,名為使用A49xx系列的步進(jìn)電機(jī)控制。
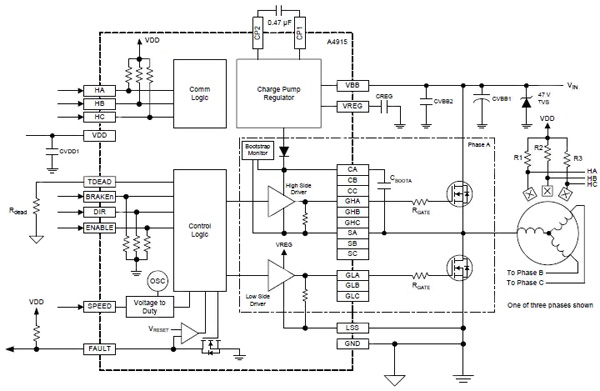
圖4:通過內(nèi)置電荷泵和制動控制系統(tǒng),基于狀態(tài)機(jī)的三相步進(jìn)控制器由來自主處理器的并行總線驅(qū)動。
關(guān)于保護(hù)的注意事項
有許多類型的電機(jī)具有獨特的特性和需求。電機(jī)可以用直流或交流驅(qū)動,使用刷子或無刷,也可以是步進(jìn)電機(jī)或薄餅。此外,驅(qū)動功率的大小可以從微瓦到兆瓦。
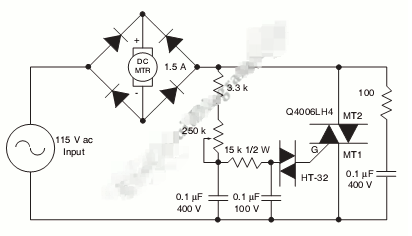
在所有情況下,當(dāng)驅(qū)動電機(jī)時,電機(jī)線圈繞組的電感特性會引入尖峰和高壓故障。如前所述,您很可能會使用功率晶體管,繼電器和H橋等驅(qū)動器設(shè)備來實際為線圈繞組供電,并使用低電平邏輯信號來控制驅(qū)動器。即使這提供了一個級別的隔離,但電機(jī)的響應(yīng)可能會泄漏回電源并可能使MCU出現(xiàn)故障。雖然微I/O線具有內(nèi)在保護(hù)功能,但它們很容易被淹沒。
工程師有幾種選擇。您可以使用浪涌抑制裝置,晶閘管,瞬態(tài)電壓抑制器,甚至氣體放電管來抑制高壓反激尖峰。另一種方法是將光隔離器用于非線性驅(qū)動電機(jī)的電隔離控制鏈路。
總結(jié)
電機(jī)控制可以像高端外設(shè)功能一樣進(jìn)行管理,也可以由微控制器直接驅(qū)動。通用MCU可以利用專用的電機(jī)驅(qū)動和控制IC。另一方面,一些集成MCU封裝解決方案包含驅(qū)動電機(jī)所需的特殊硬件邏輯,并且可以很好地控制它們。最重要的是:雖然您的需求可能會有所不同,但解決方案隨時可用。
-
控制器
+關(guān)注
關(guān)注
112文章
16444瀏覽量
179161 -
嵌入式
+關(guān)注
關(guān)注
5091文章
19176瀏覽量
307082 -
電機(jī)控制
+關(guān)注
關(guān)注
3540文章
1896瀏覽量
269174
發(fā)布評論請先 登錄
相關(guān)推薦
步進(jìn)電機(jī)的控制實現(xiàn)方法

如何實現(xiàn)永磁同步電機(jī)的智能控制
減速電機(jī)的調(diào)速方法是什么?如何調(diào)?
永磁同步電機(jī)恒壓頻比控制方法是什么?
兩分鐘帶你了解步進(jìn)電機(jī)控制的方法
伺服電機(jī)轉(zhuǎn)速調(diào)整方法
電機(jī)控制電路圖 電機(jī)控制方法及其原理





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論