") 無人機(jī)的現(xiàn)場無線充電解決方案
無人機(jī)的現(xiàn)場無線充電解決方案
亞馬遜的Prime Air無人機(jī)引起轟動,甚至沒有服務(wù)。最近,該公司發(fā)布了一項在街道路燈柱上安裝擴(kuò)展塢的建議(圖1),讓他們深入了解其開發(fā)團(tuán)隊正在應(yīng)對的后勤挑戰(zhàn)。作為轉(zhuǎn)移負(fù)載的地方,這些站點(diǎn)可以為交付計劃提供靈活性,并且可能更重要的是,車輛在繼續(xù)到最終目的地之前重新激活,等待下一個任務(wù)或返回基地的充電點(diǎn)。燈柱也方便地連接到電源。

圖1:亞馬遜已經(jīng)確定高燈柱是Prime Air無人機(jī)的安全場所
自動駕駛汽車的精確對接
為了充電,自動駕駛汽車必須與對接站上提供的充電電極準(zhǔn)確連接。亞馬遜的專利申請暗示了它可能正在考慮的安排類型(圖2)。
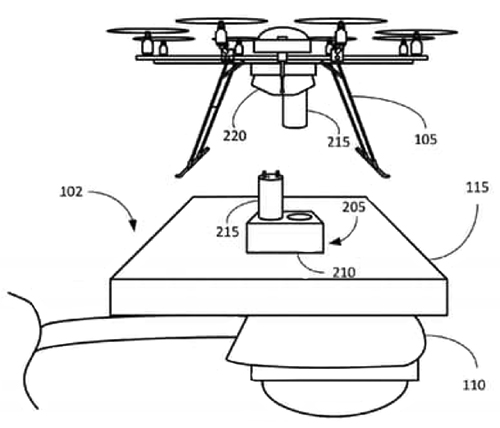
圖2:專利申請中的草圖表明了無人機(jī)可以連接到充電點(diǎn)。
要在對接之前定位車輛,可以選擇多種方案。現(xiàn)有的機(jī)器人對接系統(tǒng)提供了一些需要考慮的例子。
機(jī)器人真空吸塵器,如Roomba,已經(jīng)上市一段時間了,并通過在清潔過程中監(jiān)控電池狀況自動處理電池充電確定何時返回基站進(jìn)行充電。基站發(fā)射紅外信標(biāo),Roomba鎖定此信號,在信號返回時將信標(biāo)保持在其視野的中心。
開源ardumower機(jī)器人割草機(jī)項目采用略有不同的技術(shù)。當(dāng)電池電壓低于指示需要充電的水平時,車輛將跟隨嵌入地面的周邊線路返回其充電站。通過準(zhǔn)確地跟蹤導(dǎo)線,割草機(jī)到達(dá)對接站的入口處于合適的位置,以便被引導(dǎo)到碼頭內(nèi)部與車輛表面上的充電墊接觸的電極。
視覺對準(zhǔn)是另一個已在各種項目中展示的選項。制造商社區(qū)是一個機(jī)器人實(shí)驗(yàn)的蜂巢,包括這個在線視頻,顯示如何使用前置攝像頭定位充電站并確保正確對齊。本演示中使用Raspberry Pi和Arduino計算機(jī)的機(jī)器人會多次停止調(diào)整對齊,并且每次都可以將其位置校正幾厘米。當(dāng)車輛是懸停在塢站上方的空中無人機(jī)時,微調(diào)車輛位置可能會帶來更復(fù)雜的挑戰(zhàn)。陣風(fēng)可能會增加進(jìn)一步的復(fù)雜性。
無線充電是一種替代方案,目前由Skysense銷售的無人機(jī)著陸墊。無線充電已經(jīng)可用于移動電話和電動車輛。如果發(fā)射器和接收器相隔最多幾厘米,則可以進(jìn)行充電。通過將接收裝置引導(dǎo)到最佳位置或使用允許電力接收器自由定位的若干方法之一,可以實(shí)現(xiàn)更快的能量傳遞的更緊密定位。這些包括在充電板中構(gòu)建多個線圈以僅在接收器附近產(chǎn)生磁場,或者將發(fā)射器線圈機(jī)械驅(qū)動到靠近接收器的位置。
中國黑龍江省哈爾濱工業(yè)大學(xué)的一個團(tuán)隊利用線性霍爾傳感器結(jié)合視覺預(yù)對準(zhǔn)和隨后的高精度對準(zhǔn),解決了自動對準(zhǔn)可重構(gòu)機(jī)器人系統(tǒng)模塊的挑戰(zhàn)。這個名為UBot的機(jī)器人可以根據(jù)需要重新安排模塊來重新配置自己,以執(zhí)行各種任務(wù),并且還可以在需要時通過更換有缺陷的模塊進(jìn)行自我修復(fù)。傳感器模塊包含CCD視覺傳感器和四個線性霍爾傳感器,其位置對應(yīng)于有源對接模塊中的磁體位置。模塊能夠向前和向側(cè)面移動,并且可以旋轉(zhuǎn)。 CCD傳感器用于目標(biāo)采集并指導(dǎo)預(yù)對準(zhǔn)階段。來自線性霍爾傳感器的信號然后用于控制精確定位,然后使用鉤機(jī)構(gòu)完成對接過程。
對哈爾濱團(tuán)隊的研究結(jié)果進(jìn)行仔細(xì)檢查,可以深入了解視覺或磁性所面臨的挑戰(zhàn)對準(zhǔn)。通過從CCD圖像中提取識別的特征,計算角度和線性偏移,并進(jìn)行線性調(diào)整直到它們分別在3度和4毫米內(nèi),實(shí)現(xiàn)視覺對準(zhǔn)。然后,活動模塊移近,直到捕獲的圖像占據(jù)視野的80%。然后視覺對準(zhǔn)終止,并開始使用線性霍爾傳感器進(jìn)行精確對準(zhǔn)。 X,Y和角度校正是根據(jù)四個霍爾傳感器的輸出電壓計算出來的,與模塊配合面上的坐標(biāo)有關(guān),可以在兩個線性軸和2度角位移中精確定位模塊的精度大于1 mm。/p>
用于機(jī)器視覺應(yīng)用的各種圖像傳感器或相機(jī)模塊可能能夠支持機(jī)器人應(yīng)用中的視覺對準(zhǔn)。安森美半導(dǎo)體NOIV1SN1300A是一款單色CMOS傳感器,集成了可編程增益放大器和10位模數(shù)轉(zhuǎn)換器,并提供4個LVDS串行輸出。還提供具有并行CMOS輸出的替代變體。像素陣列為1280 x 1024,最多可以編程8個特定感興趣區(qū)域,如果需要可以提供高幀率。
與數(shù)字霍爾傳感器不同,哈爾濱項目中使用的線性類型允許以高分辨率計算位移,從而允許重復(fù)的測量校正循環(huán),最終導(dǎo)致精確對接。 Cherry LIN-11HAW等線性傳感器設(shè)計用于工業(yè)驅(qū)動和控制,以及汽車換檔位置檢測器,測量范圍高達(dá)45 mm,雙冗余輸出可提高可靠性。
設(shè)計出對準(zhǔn)確度的要求?
利用現(xiàn)有的自動駕駛車輛對接和充電知識,可以考慮采用多種技術(shù)使無人機(jī)相對于對接的充電點(diǎn)定位自己站。采用輪式車輛的典型方法是將感應(yīng)系統(tǒng)安裝在機(jī)器人上,利用機(jī)器人自身的智能和推進(jìn)力來調(diào)整相對于固定碼頭的位置。然而,定位系統(tǒng)會增加機(jī)器人的重量,這在無人機(jī)應(yīng)用中可能是不可接受的。對于亞馬遜來說,額外的重量可以轉(zhuǎn)化為減少承載能力和交付范圍。
無對準(zhǔn)無線充電可提供最小化無人機(jī)上額外電子設(shè)備需求的解決方案。如果歐姆充電觸點(diǎn)是優(yōu)選的,例如使用防水連接器,則具有內(nèi)置機(jī)構(gòu)以固定和重新定位無人機(jī)的更復(fù)雜的對接站可提供可行的替代方案。這可以像掛鉤和絞車一樣簡單,只需要無人機(jī)在標(biāo)準(zhǔn)位置提供“把手”和充電連接器。這可能有助于降低每架無人機(jī)的物料清單成本,并在必要時自由改變無人機(jī)設(shè)計;權(quán)衡是一個更復(fù)雜的擴(kuò)展塢,可能需要定期維護(hù)。
結(jié)論
任何將自動駕駛汽車對接以進(jìn)行電池充電的方法都需要準(zhǔn)確定位。可以考慮許多光學(xué)和磁性位置檢測技術(shù),盡管在懸停期間將無人機(jī)對準(zhǔn)在毫米精度內(nèi)可能證明是困難的并且可能由于諸如風(fēng)速快速變化的天氣條件而進(jìn)一步復(fù)雜化。無線充電或創(chuàng)造性機(jī)械工程可以提供一種設(shè)計無人機(jī)本身的主動定位需求的方法。
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28557瀏覽量
207675 -
無線充電
+關(guān)注
關(guān)注
1295文章
3279瀏覽量
316818 -
無人機(jī)
+關(guān)注
關(guān)注
230文章
10484瀏覽量
181334
發(fā)布評論請先 登錄
相關(guān)推薦
ROHM 無線充電解決方案
無人機(jī)系統(tǒng)發(fā)展趨勢與解決方案最新集錦
無人機(jī)開發(fā)方案要領(lǐng)與電路圖集錦
植保無人機(jī)供電系統(tǒng)解決方案
無人機(jī)偵測和反制系統(tǒng)
Ameya360 無人機(jī)視覺、高級傳感與處理解決方案
無人機(jī)續(xù)航如何提升至兩小時以上,目前的解決方案是無人機(jī)充電寶!
AMEYA360設(shè)計方案丨通用無人機(jī)解決方案
愛碼芯無人機(jī)無線充電解決方案
多軸無人機(jī)BLDC驅(qū)動解決方案
航模/無人機(jī)遙控的解決方案
反制無人機(jī)槍解決方案
無線電反制無人機(jī)系統(tǒng)解決方案
投資者投資無人機(jī)、機(jī)器人無線充電
通過無線充電讓無人機(jī)在空中停留更長時間





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論