") 采用能量收集和傳感器技術(shù)實現(xiàn)太陽能無人駕駛飛行系統(tǒng)設(shè)計
采用能量收集和傳感器技術(shù)實現(xiàn)太陽能無人駕駛飛行系統(tǒng)設(shè)計
無人駕駛飛行器(UAV)越來越多地用于廣泛的應(yīng)用,從監(jiān)測天氣和叢林火災(zāi)到交通分析。隨著電子和材料技術(shù)的改進,人們越來越關(guān)注利用機翼上的太陽能電池組為太陽能提供動力來推動傳感器和傳感器。這已經(jīng)在飛機上得到了證明,飛機可以一次停留數(shù)天,但是設(shè)計太陽能電池的功率預(yù)算的挑戰(zhàn)是關(guān)鍵。無人機越來越多地用于監(jiān)測,并且增加可以攜帶的傳感器的范圍增加了可用性。
一個例子來自澳大利亞昆士蘭科技大學(xué)的研究人員正在研究太陽能無人駕駛飛行系統(tǒng),用于全天候監(jiān)視。 2.5米翼展Green Falcon采用最先進的能量收集和傳感器技術(shù),配備新一代預(yù)警系統(tǒng),配備遙感和視覺數(shù)據(jù)功能,可檢測澳大利亞的叢林火災(zāi),挽救生命并造成數(shù)百萬美元的損失。該大學(xué)的目標是在未來兩年內(nèi)將無人機商用。
該工藝重8.8磅,無需有效載荷,可手動發(fā)射,由28個單晶太陽能電池供電,產(chǎn)生0.5 W ,由最大功率點跟蹤器,定制能源管理系統(tǒng)和鋰離子電池提供支持。
圖1:綠色獵鷹手 - 在昆士蘭科技大學(xué)開發(fā)無人機。
與有人駕駛飛機不同,無人機設(shè)計為每天24小時運行,因此它在白天使用太陽能并將多余的能量儲存在車載電池組中天黑以后為飛機提供動力。該工藝配備紅外攝像機,用于夜間搜索操作,以查找失蹤人員,將信息傳遞到地面的緊急服務(wù),所有這些都需要由太陽能電池和電池系統(tǒng)供電。
雖然規(guī)模很小,但研究人員正在研究群集能力,以便多個單位可以通過無線鏈路直接相互通信,以覆蓋最大可能的區(qū)域。
其他研究人員正在研究無人駕駛無人機監(jiān)控交通附加傳感器。 Phastball-0已在美國西弗吉尼亞大學(xué)(WVU)開發(fā),可提供高分辨率圖像,可用于工作區(qū)管理,交通擁堵,安全和環(huán)境影響研究。與固定位置地面?zhèn)鞲衅飨啾龋瑱C載傳感器可從多個角度提供移動性和測量。
手動發(fā)射的無人機是為高速公路應(yīng)用的遙感定制而成,翼展96英寸,起飛重量為21磅,包括7磅的遙感有效載荷。該飛機采用9通道R/C無線電系統(tǒng)進行遠程駕駛,并配有一對無刷電動風(fēng)扇。電動推進系統(tǒng)的使用簡化了飛行操作并減少了車載傳感器上的振動量。
遙感有效載荷系統(tǒng)包括一個高分辨率數(shù)碼相機,GPS接收器,低 - 成本慣性導(dǎo)航系統(tǒng)(INS),400碼下行激光測距儀,飛行數(shù)據(jù)記錄儀,攝像機和無線視頻傳輸系統(tǒng)。
英國國防研究公司Qinetiq正在開展工作在更大的無人駕駛無人機上稱為Zephyr。這架高空長航時(HALE)飛機不停飛行超過三天,目標是在空中停留更長時間。與其他無人機一樣,它也是手動發(fā)射,并使用非晶薄膜太陽能電池在白天提供電力。晚上,電源來自鋰硫電池。
圖2:Qinetiq在英國開發(fā)的Zephyr太陽能無人機使用非晶太陽能電池保持空中傳播。
英國國防部資助了Zephyr的開發(fā)迄今為止,并與美國國防部(DoD)合作開展了聯(lián)合能力技術(shù)示范(JCTD)計劃,該計劃旨在將急需的技術(shù)迅速轉(zhuǎn)移到美軍現(xiàn)場。美國國防部資助了該計劃下的示范飛行,這是兩國政府首次參加聯(lián)合演示的HALE無人機。
政府看到了地球觀測和通信中繼等潛在應(yīng)用。支持一系列國防,安全和民用要求。
然而,泰坦航空航天公司正在為其Solara無人高空飛機提供另一種替代方案,該飛機旨在用作“大氣衛(wèi)星”。/p》
正在開發(fā)兩個版本。 50米長的Solara 50長15.5米(54英尺),可承載32千克(70磅)的有效載荷。較大的Solara 60橫跨60米(197英尺),最大可承載100公斤(250磅)。
圖3:Solara來自泰坦航空航天公司的50架太陽能無人機旨在作為一個空中移動電話基站,在空中停留長達五年。
該飛行器由上翼的3000個太陽能電池供電,電梯和水平穩(wěn)定器提供高達7千瓦的功率,將多余的鋰離子電池存放在機翼內(nèi)。這提供足夠的動力使無人機在65英里/小時和20公里(65,000英尺)的巡航高度下保持空中長達五年。每架飛機在午夜使用電池電源起飛,然后整天從太陽能電池重新充電。
Solara 50使用自動駕駛儀,可以自動飛行,起飛和降落飛機;除了有效載荷中的各種車載傳感器外,它還具有高速無線電鏈路,可將遙測數(shù)據(jù)傳回地面站。泰坦甚至認為該飛機用于為超過6,500平方英里(16,800平方公里)的區(qū)域提供手機覆蓋,取代了超過100個基站。
太陽能電池
太陽能電池對這些無人機的發(fā)展至關(guān)重要,有三種不同的類型:晶體硅,非晶硅或化合物半導(dǎo)體。
與晶體硅不同,非晶硅具有不規(guī)則的原子排列,由此產(chǎn)生的倒數(shù)光子和硅原子之間的作用更頻繁地發(fā)生,允許更多的光被吸收。這意味著可以生產(chǎn)小于1μm的超薄非晶硅膜并用于發(fā)電。這種薄型電池與輕質(zhì)塑料基板相結(jié)合,使非晶硅太陽能電池(如松下的Amorton技術(shù))成為無人駕駛無人機所需能量的理想選擇。
Amorton是一種集成的非晶硅太陽能電池,由Panasonic的SANYO部門使用硅烷(SiH4)作為其源氣體開發(fā),并使用等離子體化學(xué)氣相沉積(CVD)制造。 CVD工藝在玻璃基板上構(gòu)建三個非晶硅層,p-,i-和n-層。該p-i-n結(jié)對應(yīng)于晶體硅太陽能電池的p/n結(jié)。在該結(jié)形成的過程中,許多單元一次串聯(lián)連接在基板上。這樣可以獲得任何所需的電壓。
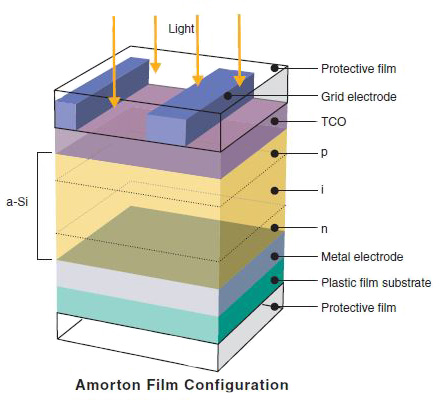
圖4:Amorton太陽能電池的層結(jié)構(gòu)。
這是與細胞被切割然后連接的晶體硅非常不同,因為它允許多個電池在電池形成的同時串聯(lián)連接,從而產(chǎn)生具有各種電壓的電池,可以針對無人機功率進行優(yōu)化用于形成非晶薄膜的方法具有特殊功能,可以使用其他基材(如塑料薄膜)代替通常的玻璃基板,從而形成僅為0.3的能量收集源。毫米厚。
圖5:采用Amorton技術(shù)電源管理的松下84μA非晶太陽能電池。
電源管理對無人機的推進系統(tǒng)和傳感器系統(tǒng)都至關(guān)重要。對于傳感器,德州儀器的eZ430-RF2500-SEH太陽能收集開發(fā)套件有助于在基于超低功耗MSP430微控制器的無人機內(nèi)創(chuàng)建無線傳感器網(wǎng)絡(luò)。
圖6:TI的eZ430太陽能收集開發(fā)系統(tǒng)。
它包括一個高效太陽能電池板(2.25 x 2.25“),可提供足夠的電力來運行無線傳感器應(yīng)用,無需額外電池。該系統(tǒng)還在Cymbet的一對薄膜可充電EnerChip中管理和存儲額外的能量,這些能夠為超過400次傳輸提供足夠的電力。 EnerChips充當(dāng)能量緩沖器,在應(yīng)用程序處于睡眠狀態(tài)時存儲能量并且具有可用于收獲的光。電池是環(huán)保的,可以充電數(shù)千次。它們還具有非常低的自放電,這對于無功率能量收集系統(tǒng)至關(guān)重要。
eZ430-RF2500用于運行能量收集應(yīng)用。它是一個完整的基于USB的MSP430無線開發(fā)工具,提供使用MSP430F2274微控制器和CC2500 2.4 GHz無線收發(fā)器所需的所有硬件和軟件。它包括一個USB調(diào)試接口,允許對MSP430進行實時的系統(tǒng)內(nèi)調(diào)試和編程,它也是從無線系統(tǒng)向PC傳輸數(shù)據(jù)的接口。
eZ430-RF2500-SEH傳感器監(jiān)視器是一個完整的開源應(yīng)用程序,包括用于硬件測試的示例能量感知項目,可用作能量收集項目的框架。為MSP430提供固件,以及用于顯示來自網(wǎng)絡(luò)的數(shù)據(jù)樣本的PC演示應(yīng)用程序。在太陽能電池提供的預(yù)算緊張的情況下,管理無人機中所有系統(tǒng)的電源至關(guān)重要。 bq25504是德州儀器(TI)全新智能集成能量采集電源管理系列中的第一款產(chǎn)品,專門用于高效采集和管理各種直流電源產(chǎn)生的微瓦(μW)至miliwatts(mW)功率bq25504的設(shè)計始于高效的DC-DC升壓轉(zhuǎn)換器/充電器,只需要微瓦的功率即可開始工作,一旦啟動,就能有效地從中獲取電能。低壓輸出采集器,如單節(jié)或雙節(jié)太陽能電池板。升壓轉(zhuǎn)換器可以在VIN低至330 mV的情況下啟動,一旦啟動,可以繼續(xù)將能量收集到80 mV的輸入電壓。
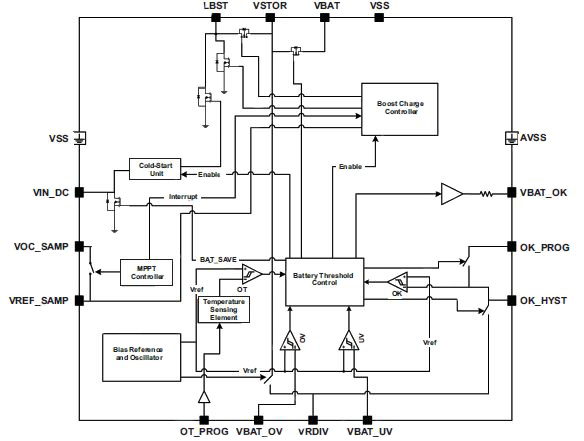
圖7:TI的bq25504 DC-DC升壓轉(zhuǎn)換器/充電器示意圖顯示了最大功率點管理模塊。
bq25504還實現(xiàn)了可編程的最大功率點跟蹤采樣網(wǎng)絡(luò),以優(yōu)化功率傳輸?shù)皆O(shè)備。采用外部電阻對VIN_DC開路電壓進行采樣,并使用外部電容(CREF)進行采樣。
對于工作在最大功率點(MPP)為開路電壓80%的太陽能電池,電阻分壓器可設(shè)置為VIN_DC電壓的80%,網(wǎng)絡(luò)將控制VIN_DC在該采樣參考電壓附近工作。或者,微控制器可以提供外部參考電壓,以產(chǎn)生更復(fù)雜的MPPT算法。
bq25504的設(shè)計靈活,可以支持這些無人機中使用的各種儲能元件和電池技術(shù),從鋰離子到鋰 - 硫。存儲元件確保在無人機上的所有系統(tǒng)需要時可以獲得恒定功率,并且還允許系統(tǒng)處理不能直接來自太陽能電池的任何峰值電流。
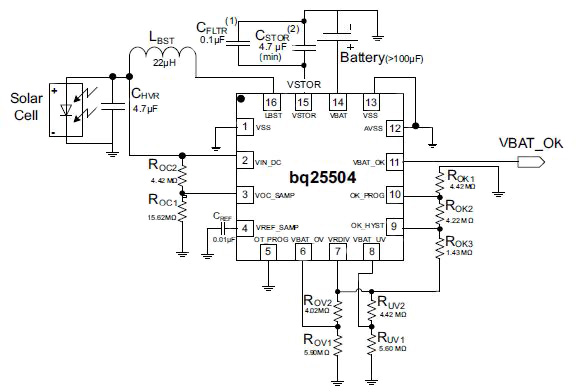
圖8:將bq25504連接到太陽能電池陣列,為太陽能無人機中的傳感器網(wǎng)絡(luò)供電。
為了防止損壞電池并延長無人機的飛行時間,無論是最大值還是最小值根據(jù)用戶編程的欠壓(UV)和過壓(OV)電平監(jiān)控電壓。為了進一步幫助用戶嚴格管理電池的能量預(yù)算,當(dāng)蓄電池或電容器上的電壓降至預(yù)設(shè)的臨界水平以下時,bq25504切換電池良好標志,向連接的微處理器發(fā)出信號。這應(yīng)該觸發(fā)負載電流的脫落,以防止系統(tǒng)進入欠壓狀態(tài)。 OV,UV和電池良好的閾值都是獨立編程的。 bq25504采用小尺寸,16引腳,3 mm x 3 mm QFN封裝,適用于小型無人機系統(tǒng)。
結(jié)論
無人機等小型和大型太陽能無人機對于多種監(jiān)控任務(wù)來說,它們變得越來越有趣。隨著最初的原型在空中停留幾個小時,新一代無人機正在優(yōu)化太陽能電池技術(shù)和電源管理,以便在運行中花費數(shù)年時間,開辟各種新機會。
仔細管理系統(tǒng)的電源可延長電池壽命,使飛行器可以飛行更長時間,從而可以更好地監(jiān)控道路和天氣,以及針對危急情況的更多搜索模式。優(yōu)化太陽能電池和電源管理的額外功率還支持更多傳感器系統(tǒng),如慣性導(dǎo)航和紅外攝像機,以提高無人機的效用并改善業(yè)務(wù)案例。現(xiàn)在,額外的可用功率也足以為先進的蜂群算法提供動力,以增加小型飛機的覆蓋范圍,甚至達到運行蜂窩基站的合適水平。
-
傳感器
+關(guān)注
關(guān)注
2551文章
51147瀏覽量
753999 -
太陽能
+關(guān)注
關(guān)注
37文章
3414瀏覽量
114290 -
無人機
+關(guān)注
關(guān)注
230文章
10453瀏覽量
180659
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論