") 用于監(jiān)控飛機壽命的傳感器融合系統(tǒng)的設(shè)計方案
用于監(jiān)控飛機壽命的傳感器融合系統(tǒng)的設(shè)計方案
有源傳感器系統(tǒng)正在成為飛機設(shè)計中越來越重要的元素。整理載荷,應(yīng)變,溫度和壓力數(shù)據(jù)可以更詳細(xì)地記錄飛機中不同部件的狀態(tài),并提供問題的早期指示。本文著眼于利用ADI公司,飛思卡爾半導(dǎo)體公司,德州儀器公司,TE Connectivity公司和歐姆龍公司的傳感器和轉(zhuǎn)換技術(shù),在飛機上使用不同傳感器技術(shù)的方式。
傳感器融合是一個日益重要的元素,即系統(tǒng)設(shè)計。將多個傳感器與微控制器或微處理器集成以處理傳感器接口處系統(tǒng)控制的更多方面,可提高可靠性和準(zhǔn)確性,同時降低功耗。所有這些都是航空電子傳感器系統(tǒng)設(shè)計的積極舉措。這已經(jīng)發(fā)生在用于慣性導(dǎo)航的MEMS加速度計和壓力傳感器的傳感器融合中,并且還可以用于整合來自機身周圍的更多數(shù)據(jù)。這為維護和控制提供了更多數(shù)據(jù),降低了運行飛機的總成本,并允許在降級之前更換組件。
傳感器融合系統(tǒng)可以使用ADI公司的AD7476/AD7477/AD7478等器件構(gòu)建加上微控制器。這些是12位,10位和8位,高速,低功耗,逐次逼近型ADC,采用六引腳SOT23封裝,重量和尺寸極小。這些器件采用2.35 V至5.25 V單電源供電,吞吐速率高達1 MSPS。每個器件都包含一個低噪聲,寬帶寬采樣保持放大器,可以處理超過6 MHz的輸入頻率,使其適用于溫度和應(yīng)變等傳感器。
轉(zhuǎn)換過程和數(shù)據(jù)采集使用串行時鐘,允許設(shè)備與微處理器或DSP連接。輸入信號在時鐘的下降沿采樣,此時啟動轉(zhuǎn)換。這些器件沒有相關(guān)的流水線延遲。
AD7476/AD7477/AD7478(圖1)采用先進的設(shè)計技術(shù),在高吞吐速率下實現(xiàn)極低的功耗,有助于減少航空電子設(shè)計的重量。器件的基準(zhǔn)電壓源來自VDD,它允許ADC具有最寬的動態(tài)輸入范圍,因此器件的模擬輸入范圍為0 V至VDD。
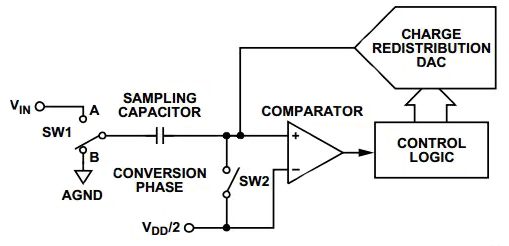
圖1:塊AD7476/AD7477/AD7478系列數(shù)據(jù)轉(zhuǎn)換器的示意圖。
轉(zhuǎn)換速率由串行時鐘決定,允許通過串行時鐘速度增加來降低轉(zhuǎn)換時間。這允許在不轉(zhuǎn)換和減少功率和重量的同時降低平均功耗。這些器件還具有關(guān)斷模式,可在較低的吞吐率下最大限度地提高功效。在關(guān)斷模式下,電流消耗最大為1μA。
器件采用標(biāo)準(zhǔn)逐次逼近型ADC,通過輸入和一次性轉(zhuǎn)換控制精確控制采樣時刻。 ADC不需要外部基準(zhǔn)電壓源,也不存在片內(nèi)基準(zhǔn)電壓源,因為它來自電源,因此可提供最寬的動態(tài)輸入范圍。
AD7476/AD7477/AD7478器件還具有電源 - 向下選項可在轉(zhuǎn)換之間節(jié)省電量。斷電功能在標(biāo)準(zhǔn)串行接口上實現(xiàn),有助于降低系統(tǒng)的重量ADC可用于連接溫度傳感器,如LT73,可放置在機身周圍,以確定影響各個系統(tǒng)的溫度曲線。類似地,諸如125UT的應(yīng)變儀可以放置在機身的關(guān)鍵點上。通過傳感器融合,數(shù)據(jù)采集系統(tǒng)可以生成機身上的應(yīng)變曲線,并監(jiān)控數(shù)據(jù)何時落在輪廓之外。這提供了有關(guān)飛機健康狀況的寶貴信息。
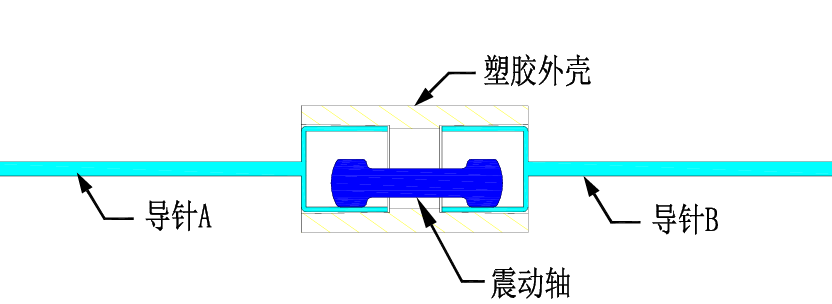
圖2:125UT應(yīng)變計可用作傳感器融合監(jiān)測系統(tǒng)的一部分。
將這些數(shù)據(jù)與數(shù)據(jù)結(jié)合起來來自諸如D7E的振動傳感器提供了關(guān)于飛機健康狀況的更多信息,并允許傳感器融合算法將所有數(shù)據(jù)組合以進行更準(zhǔn)確的監(jiān)測和預(yù)測。它們由微控制器或數(shù)字信號處理器實現(xiàn),可直接連接到ADC。諸如線性二次估計(LQE)之類的算法(也稱為卡爾曼濾波器(見下文))可用于跟蹤隨時間的測量并提供有關(guān)設(shè)備狀況的有用反饋。
控制器也可用于監(jiān)控傳感器本身的狀況,避免錯誤讀數(shù)。基于時間的算法(如卡爾曼濾波)還允許系統(tǒng)識別故障傳感器而不是被監(jiān)控的系統(tǒng)組件。
微處理器接口
AD7476/AD7477/AD7478上的串行接口允許器件直接連接然后,TMS320C5x上的串行接口使用連續(xù)的串行時鐘和幀同步信號來同步數(shù)據(jù)傳輸操作與外圍設(shè)備等一系列不同的微處理器,然后可以控制與飛機網(wǎng)絡(luò)的接口并實現(xiàn)傳感器融合算法。作為AD7476/AD7477/AD7478。該輸入允許在不需要任何膠合邏輯的情況下輕松連接TMS320C5x/C54x與AD7476/AD7477/AD7478。此外,TMS320C5x/C54x的串行端口設(shè)置為在突發(fā)模式下工作,具有內(nèi)部CLKX(Tx串行時鐘)和FSX(Tx幀同步)。
串行端口控制寄存器(SPC)必須具備以下功能設(shè)置:FO = 0,F(xiàn)SM = 1,MCM = 1,TXM = 1.格式位FO可設(shè)置為1,將字長設(shè)置為8位,以便在ADC上實現(xiàn)掉電模式。對于信號處理應(yīng)用,TMS320C5x/C54x的幀同步信號必須提供等距采樣。
ADSP-21xx系列DSP直接連接到AD7476/AD7477/AD7478,無需任何膠合邏輯。實現(xiàn)在掉電模式下,SLEN設(shè)置為0111以發(fā)出8位SCLK突發(fā)。 ADSP-21xx將SPORT的TFS和RFS連接在一起,TFS設(shè)置為輸出,RFS設(shè)置為輸入。 DSP以交替幀模式工作,并且SPORT控制寄存器如上所述進行設(shè)置。
TFS上生成的幀同步信號與所有信號處理應(yīng)用程序相關(guān),并且與等距采樣相關(guān)。但是,在此示例中,定時器中斷控制ADC的采樣率,并且在某些條件下,可能無法實現(xiàn)等距采樣。
定時器寄存器加載一個值,該值以所需的采樣間隔提供中斷。接收到中斷時,將使用TFS/DT(ADC控制字)傳輸值。 TFS控制RFS,從而控制數(shù)據(jù)的讀取。串行時鐘的頻率在SCLKDIV寄存器中設(shè)置。當(dāng)給出用TFS發(fā)送的指令時,例如TX0 = AX0,檢查SCLK的狀態(tài)。在傳輸開始之前,DSP等待SCLK變?yōu)楦撸秃透摺H绻x擇定時器和SCLK值使得發(fā)送指令發(fā)生在SCLK的上升沿或接近SCLK的上升沿,則可以發(fā)送數(shù)據(jù),或者它可以等到下一個時鐘沿。
ADSP-2111有一個主器件時鐘頻率為16 MHz。如果SCLKDIV寄存器加載值3,則獲得2 MHz的SCLK,并且每個SCLK周期經(jīng)過8個主時鐘周期。如果定時器寄存器加載了值803,則在中斷之間以及隨后在發(fā)送指令之間發(fā)生100.5 SCLK。這種情況導(dǎo)致非等距采樣,因為發(fā)送指令發(fā)生在SCLK邊沿。如果中斷之間的SCLK數(shù)是N的整數(shù)整數(shù),則DSP實現(xiàn)等距采樣。
ADC還可以連接到飛思卡爾半導(dǎo)體DSP56xxx系列DSP的同步串行接口(SSI)。 SSI以同步模式(CRB中的SYN位= 1)運行,內(nèi)部生成的字幀同步用于Tx和Rx(CRB中的位FSL1 = 0和FSL0 = 0)。通過在CRA中設(shè)置WL1 = 1和WL0 = 0,將字長設(shè)置為16.
要在數(shù)據(jù)轉(zhuǎn)換器上實現(xiàn)掉電模式,可以通過設(shè)置WL1 = 0位來將字長改為8位。 CRA中WL0 = 0。類似地,對于信號處理應(yīng)用,來自DSP56xxx的幀同步信號必須提供等距采樣。
然后,控制器可用于實現(xiàn)融合算法和網(wǎng)絡(luò)接口。這可以在飛機內(nèi)使用諸如ARINC之類的協(xié)議或用于維護的外部接口。 ARINC429收發(fā)器接口與配套的ARINC總線接口電路配合使用,可提供數(shù)據(jù)格式化和處理器接口功能。所有邏輯輸入均為TTL和CMOS兼容,需要三個電源:V = + 15 V±10%, - V = -15 V±10%,V1 = 5 V±5%。 VREF用于編程差分輸出電壓擺幅,使VOUT(DIFF)=±2 VREF。通常,VREF = V1 = 5 V±5%,但VREF可以使用單獨的電源,電源不應(yīng)超過6 V.
所有這些因素都集中在MEMS慣性測量單元(IMU)中-degree-of-freedom(DoF)。這實現(xiàn)了嵌入式傳感器融合算法,可在平臺穩(wěn)定,導(dǎo)航和儀器儀表中提供極其精確的定向感應(yīng)。 ADIS16480(圖2)在單個封裝中集成了三軸陀螺儀,三軸加速度計,三軸磁力計,壓力傳感器和ADI公司的ADSP-BF512 Blackfin處理器。
圖3:ADIS16480傳感器融合系統(tǒng)集成了三軸陀螺儀,三軸加速度計,三軸磁力計,壓力傳感器和Blackfin數(shù)字信號處理器。
ADIS16480采用擴展卡爾曼濾波器(EKF)隨著時間的推移融合傳感器輸入,以提供極其精確的定位,同時減少設(shè)計時間和成本。這在需要實時定位的系統(tǒng)中特別有用,但運動是恒定的,復(fù)雜的和動態(tài)的,例如軍用和商用飛機導(dǎo)航。
卡爾曼濾波器卡爾曼濾波是一種估算給定狀態(tài)的數(shù)學(xué)算法通過隨時間進行多次測量,并將這些與預(yù)測狀態(tài)估計器合并,來實現(xiàn)嘈雜,可變的過程。該濾波器智能地結(jié)合了MEMS IMU的運動傳感器輸入,即使在以恒定,不可預(yù)測的運動為特征的復(fù)雜運行條件下,也能提供極其精確的定位數(shù)據(jù)。通過將濾波器嵌入Blackfin處理器的內(nèi)核,ADI還為設(shè)計人員節(jié)省了與其他MEMS IMU所需的密集代碼開發(fā),測試和外部處理相關(guān)的時間和成本。
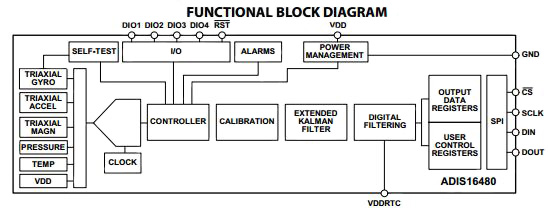
圖4:ADIS16480傳感器融合系統(tǒng)的框圖。
在確定精確位置或方向時,航空電子系統(tǒng)不僅依賴于單個傳感器的精度,還依賴于精確,動態(tài)地組合多個輸入的復(fù)雜性。擴展卡爾曼濾波器有助于系統(tǒng)根據(jù)情境感知識別哪些傳感器“信任”。這使得系統(tǒng)級設(shè)計人員可以在各種苛刻的環(huán)境條件下通過自動調(diào)整濾波器或通過其可編程接口調(diào)整濾波器來實現(xiàn)定位精度。
330 MHz帶寬支持緊密對齊(0.05度)和相位匹配的軸,具有0.01%的業(yè)界領(lǐng)先的非線性。每個MEMS IMU都經(jīng)過獨特的工廠校準(zhǔn),大大減少了與開發(fā)和集成相關(guān)的時間和風(fēng)險,并且對熱漂移提供了極低的靈敏度。
結(jié)論
使用小型,低功耗的多個傳感器數(shù)據(jù)轉(zhuǎn)換裝置可以為航空電子設(shè)備提供數(shù)據(jù)融合系統(tǒng)的基礎(chǔ)。這可用于使用可跟蹤性能隨時間推移的現(xiàn)代算法來監(jiān)控設(shè)備甚至機身的狀態(tài)。使用此數(shù)據(jù)預(yù)測維護計劃有助于降低降級風(fēng)險并提高性能,從而降低總體成本。現(xiàn)代的低功率,小型數(shù)據(jù)轉(zhuǎn)換器和傳感器可以提供這種能力,而不會顯著增加飛機的重量。采用MEMS技術(shù)進行壓力傳感也有助于提高可靠性。
-
微控制器
+關(guān)注
關(guān)注
48文章
7576瀏覽量
151727 -
傳感器
+關(guān)注
關(guān)注
2552文章
51289瀏覽量
755164 -
監(jiān)控
+關(guān)注
關(guān)注
6文章
2222瀏覽量
55286
發(fā)布評論請先 登錄
相關(guān)推薦
動環(huán)監(jiān)控系統(tǒng)解決方案功能優(yōu)勢
無線溫度傳感器:精準(zhǔn)監(jiān)控,無線傳輸?shù)臏囟裙芾斫鉀Q方案
ADS1118和ADS8665電流電壓測量模式下如何檢測是否連接傳感器?
PLC遠(yuǎn)程監(jiān)控物聯(lián)網(wǎng)方案解析

機房動環(huán)監(jiān)控系統(tǒng)應(yīng)用方案
在物聯(lián)網(wǎng)系統(tǒng)中振動傳感器測量振動的高精度方案
物聯(lián)網(wǎng)系統(tǒng)中磁場變化檢測方案_霍爾傳感器
傳感器技術(shù)在構(gòu)建實時監(jiān)控系統(tǒng)中有什么作用
OPT3005 用于視頻監(jiān)控攝像頭的環(huán)境光傳感器 (ALS) 數(shù)據(jù)表

振動傳感器報警系統(tǒng)部隊軍械彈藥庫安全防范工程設(shè)計方案YT-JB3
未來已來,多傳感器融合感知是自動駕駛破局的關(guān)鍵
壓力傳感器的接口電路中做好抗干擾的設(shè)計方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論