 如何滿足無人機大功率電機的要求
如何滿足無人機大功率電機的要求
無人駕駛飛行器(UAV)已成為軍事基礎設施的重要組成部分,并且從武器攜帶平臺到用于監視和情報收集的小型和難以追蹤的單位的種類越來越多。無人機平臺具有很強的適應性,允許使用不同的傳感器類型,如圖像傳感器和相機,以及光譜儀和化學傳感器,用于使用高光譜成像和傳感器融合的復雜分析。
圖1:無人機具有廣泛的應用[來源:北約]。
各種各樣的要求導致在分析電力需求和電力供應方式時需要做出大量選擇。圖像處理和傳感器融合解決方案往往意味著需要大量的處理能力,這增加了無人機的總體功率要求。盡管如此,一些功能可以被卸載到地面站,用于捕獲的數據不太可能被空中干擾或截獲的系統,并且可以容忍往返處理延遲的等待時間。圖像處理可以被分割,使得主要用于導航的更簡單的技術可以保存在機載系統上,但是主要由地面部隊或情報服務使用的更復雜的分析通過無線電通信被卸載。用于本地處理,高 - 性能移動中央處理單元(CPU)和并行處理圖形處理單元(GPU)最初設計用于結合到移動電話中,可以以低成本和低功率提供有效的計算機平臺。這些類型的處理器可以提供千兆級的計算能力,但功耗不到10瓦。然而,這些器件具有可能使設計復雜化的功率需求,因為它們的核心邏輯通常在1V或更低的低電壓下工作,但是I/O和存儲器訪問需要支持其他電壓軌。根據可能在任何時間使用執行單元的方式,它們也往往具有高度可變的能量需求。
重量是無人機的關鍵因素。任何可以減輕發電和支持電子設備重量的事情都可以用于更大的有效載荷,更長的飛行時間,允許從較短的跑道起飛,或允許使用替代電源。太陽能是長距離,高空無人機的潛在能源。燃料電池可在未來的設計中提供高能量密度選擇,鋰離子或鋰聚合物電池可作為備用電源或作為小型無人機的主要電源。
當前無人機中的主要動力源可能是基于渦輪機的燃料動力發電機,其選擇的能量密度相對較高。發電機產生的交流電通常轉換為中壓或高壓直流電,以便分配給不同的無人機電子和電子子系統。
初級電壓可以采用級聯方式轉換為適當的電壓電平,點對點負載(POL)轉換器提供所需電壓水平,靠近需要它們的設備。盡管在絕緣和操作安全性方面使用低壓導軌更容易管理,但如果用于在較長距離上傳輸電力的導軌設計為在較高電壓下運行,則損耗將會降低。這將最大限度地減少I2R損耗,盡管這里的任何改進都需要與任何POL轉換器的損耗進行平衡。由于無人機需要攜帶的設備種類繁多,因此需要支持各種各樣的電壓;從先進的圖像處理和制導處理器的1 V或更低,到執行器的24 V,例如用于部署著陸輪的那些,可能用于飛行轉子的更高水平。
由于電壓范圍廣,中頻根據無人機的大小和可能用于維持飛行的大功率電機的要求,24 V或48 VDC的直流值最有意義。主配電總線可以降級為中間總線,以將12 VDC范圍內的較低電壓提供給POL轉換器,POL轉換器可以使用非隔離設計來降低成本和尺寸。
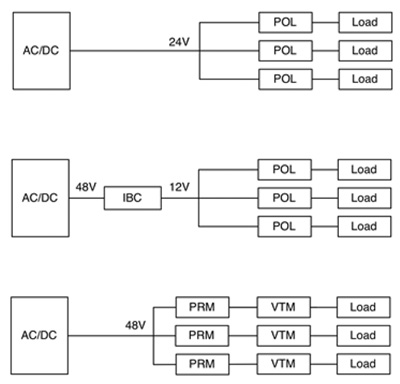
圖2:發電機驅動無人機的不同配電架構的比較。
中間總線轉換器的一個例子是來自CUI的Novum NQB-420DWA,這是一種基于數字控制器的設計,可提供多達39 A,輸入電壓為36 V-75 V,電壓為12 V.該設計采用緊湊的行業標準四分之一磚形式。這種磚式轉換器中的數字控制策略的優點是即使在相對低的負載下也是高效的。即使在半負載下,NQB-D仍然保持96%以上的效率,而老式架構只能在滿負載或接近滿負載的情況下保持高效率。
對于下游使用,可選擇用于移動處理器的POL轉換器和高級可編程邏輯是德州儀器公司的TPS84621。為了節省空間,DC/DC轉換器將功率MOSFET,電感器和其他無源器件拉入薄型封裝,在其大部分輸出范圍內提供高達6 A的效率,效率高于90%。該轉換器采用12 V電源供電,效率超過90%,從1.5 A到略高于5 A.轉換器將支持0.6 V至5.5 V的電壓軌,精度為1%。
級聯配電系統的額外復雜性,效率提高5%或10%可能看起來不明智,但失去的能量將作為熱量消散,這需要包含更大的散熱器,甚至可能更復雜的冷卻布置,因為對流變得在高海拔地區效率較低。這些因素增加了總重量并縮短了飛行時間或降低了有效載荷能力。但是,效率計算需要根據具體情況進行。 POL轉換器設計的改進導致了降壓轉換器拓撲結構的出現,這種拓撲結構可以消除對中間總線的需求。例如,飛兆半導體的FAN8303可為接近1 V的較小處理器提供2 A的輸出電流,或者在5 V至23 V的工作輸入范圍內需要高達20 V的電壓供應的傳感器。為了節省空間, FAN8303采用單片設計,集成了基于非同步架構的內部功率MOSFET。該器件采用電流模式工作,提供快速瞬態響應,允許使用能夠快速在功耗模式之間移動的處理器。安全功能包括逐周期電流限制和熱關斷保護,以防損壞導致連接短路。
傳統中間總線架構的替代方案是采用分解拓撲,其中調節和電壓轉換被分離并由單獨的模塊執行。雖然這一開始看起來過于復雜,但該技術可以優化內部電子設備并簡化整個配電系統。通過使用分解功率架構,可以支持高電流,低電壓負載,而無需采用中間總線架構。分解功率的另一個好處是它非常適合提供脈沖功率,例如雷達系統所需的功率。
在雷達系統中,發射器和接收器電子器件可以在很短的時間內要求高電流。這種低占空比可以通過一組比傳統電源拓撲更小的分解功率器件來適應。這樣可以保持更高的整體效率,因為POL轉換器的工作時間更接近其峰值效率點,并且不需要大型去耦電容陣列來提供這種峰值需求所暗示的快速瞬態響應。
Vicor的分解功率架構使用器件稱為基于正弦幅度轉換器(SAC)的電壓轉換模塊(VTM),幾乎可以即時提供POL電流。保持電壓在容差范圍內所需的控制由上游降壓 - 升壓零電壓開關(ZVS)調節器執行,因此其控制環路不會影響瞬時電流的輸送。
通過使用a來確保下游調節調節器和VTM之間的固定電壓比。但是,由于VTM執行真正的分壓和電流倍增,因子分解總線電壓可設置為遠高于中間總線系統中常見的總線電壓的值,從而減少分配損耗并允許使用更窄的分配總線跟蹤
SAC拓撲本身在內部使用高頻諧振回路,有助于保持工作1 ms或更短時間的脈沖負載容量。通過在穩壓點和最終負載之間使用高頻SAC,可以降低整個電路的串聯阻抗,從而使儲能大容量電容的比例縮小約為VIN/VOUT比的兩倍。 》Vicor分解功率架構中的模塊配對提供了傳統遙感和反饋環路的單線替代方案,可以精確控制隔離的POL電壓,無需直接連接負載或噪聲敏感,反饋路徑中的帶寬限制隔離器件。使用電池供電時,使用較低電壓的中間總線可以獲得更高的整體效率,運行電壓為12 V左右,因為升壓轉換器需要轉換低壓大多數電池組輸出到更高的電壓。隨著燃料電池和太陽能等技術的出現,無人機設計人員的選擇將會增加。例如,使用燃料電池的實驗表明,功率轉換拓撲的選擇對整體效率至關重要。來自堪薩斯州立大學的研究人員發現,乙醇燃料電池呈現可變的非線性阻抗,這些阻抗不能單獨作為占空比的函數顯示可預測的輸出,這使得很難使用基于脈沖寬度調制(PWM)的傳統轉換拓撲結構。
太陽能系統將依賴于使用最大功率點跟蹤(MPPT)跟蹤電路來確保在轉換為適合于補充二次電池或中間總線電壓的電壓之前以最佳電壓收獲太陽能。
隨著無人機的發展,將出現更多高效率的電力轉換架構,以考慮到各種各樣的燃料來源和飛行器的應用。
-
傳感器
+關注
關注
2552文章
51361瀏覽量
755695 -
轉換器
+關注
關注
27文章
8741瀏覽量
147712 -
無人機
+關注
關注
230文章
10511瀏覽量
181689
發布評論請先 登錄
相關推薦
無人機續航如何提升至兩小時以上,目前的解決方案是無人機充電寶!
無人機類型之植保無人機,帶你了解什么是植保無人機?
請問我購買什么樣的無人機才可以滿足要求?
無人機云臺電機是什么電機?
無人機云臺是什么
無人機反制市場分析
無人機反制設備的原理是什么?
無人機圖傳控制大功率WIFI模塊飛控系統原理介紹
四頻四路大功率無人機干擾儀的詳細介紹
深圳特信反制槍大功率無人機干擾器,為低空安全保駕護航






 工商網監
工商網監
評論