") 將GNSS模塊用于實(shí)時(shí)定位系統(tǒng)設(shè)計(jì)
將GNSS模塊用于實(shí)時(shí)定位系統(tǒng)設(shè)計(jì)
資產(chǎn)跟蹤是一項(xiàng)重大業(yè)務(wù)。隨時(shí)了解貴重物品的高度準(zhǔn)確性可提高生產(chǎn)率,增強(qiáng)安全性并降低成本。然而,資產(chǎn)跟蹤僅限于高價(jià)值物品,因?yàn)楦哔|(zhì)量的全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)接收器可能難以設(shè)計(jì)和實(shí)施,昂貴且耗電。
模塊化GNSS解決方案的引入通過(guò)提供緊湊,相對(duì)便宜和低功耗的替代方案,專(zhuān)門(mén)設(shè)計(jì)用于將資產(chǎn)跟蹤擴(kuò)展到更廣泛的應(yīng)用程序,更容易實(shí)現(xiàn)。盡管如此,仍有許多模塊可供選擇,它們都對(duì)電源質(zhì)量敏感。此外,電池供電的終端產(chǎn)品需要特別注意模塊的低功耗模式。
本文介紹了一些GNSS模塊,并解釋了如何將它們用作實(shí)時(shí)定位系統(tǒng)(RTLS)的基礎(chǔ)。文章介紹了如何設(shè)置模塊以獲得最大靈敏度,與主機(jī)微控制器的通信,快速衛(wèi)星采集以及最佳功率效率。
GNSS的基礎(chǔ)
GNSS RF接收器采用衛(wèi)星星座的優(yōu)勢(shì),如美國(guó)的GPS,俄羅斯的GLONASS或歐洲的伽利略,可以讓室外移動(dòng)資產(chǎn)的精確度達(dá)到幾米或更高。
GNSS通過(guò)提升工作來(lái)自軌道星座中至少三顆衛(wèi)星的獨(dú)特導(dǎo)航信號(hào)。衛(wèi)星和接收器之間的同步使得能夠確定來(lái)自衛(wèi)星的相應(yīng)信號(hào)傳播延遲(并因此確定距離)。衛(wèi)星的信號(hào)球(半徑等于計(jì)算的距離)和地球的球體的交點(diǎn)確定了接收器的精確位置。
每顆衛(wèi)星發(fā)射低功率射頻信號(hào),包括衛(wèi)星識(shí)別,星歷數(shù)據(jù)(詳細(xì)說(shuō)明衛(wèi)星當(dāng)前和未來(lái)的軌道位置及其狀態(tài)。
接收機(jī)精度取決于其與衛(wèi)星時(shí)鐘同步的準(zhǔn)確性; 1納秒(ns)的誤差可能導(dǎo)致30厘米(cm)的位置誤差。
接收器的關(guān)鍵操作參數(shù)是首次定位時(shí)間(TTFF)。冷啟動(dòng)TTFF,接收器啟動(dòng)時(shí)沒(méi)有信號(hào)或先前的位置信息,可能需要一分鐘。如果接收器由于關(guān)閉而沒(méi)有移動(dòng),并且仍然具有板載存儲(chǔ)器中的先前位置信息,則它可以執(zhí)行熱啟動(dòng),這導(dǎo)致大約25到30秒的TTFF。當(dāng)接收器在其存儲(chǔ)器中具有最近的位置信息時(shí)可以進(jìn)行熱啟動(dòng),因此可以準(zhǔn)確地預(yù)測(cè)衛(wèi)星位置并且僅產(chǎn)生1秒的TTFF。
因?yàn)镚NSS衛(wèi)星傳輸很弱,所以接收器靈敏度高重要。一旦接收器定位了衛(wèi)星,信號(hào)采集時(shí)間就會(huì)改善,因?yàn)槿绻盘?hào)被阻擋,接收器可以預(yù)測(cè)衛(wèi)星的下一個(gè)位置重新獲得信號(hào),而不必掃描大片天空。
新模塊易于使用設(shè)計(jì)
從頭開(kāi)始設(shè)計(jì)GNSS系統(tǒng)是一項(xiàng)復(fù)雜的工作。如果開(kāi)發(fā)人員具備專(zhuān)業(yè)知識(shí),那么這樣的策略可能會(huì)在成本,尺寸和性能方面產(chǎn)生更加差異化的最終產(chǎn)品,但對(duì)于經(jīng)驗(yàn)較少的模塊而言,通常是更明智的選擇。模塊經(jīng)過(guò)組裝,包裝,測(cè)試,并且(通常)經(jīng)過(guò)驗(yàn)證的單元可以放入最終產(chǎn)品中。設(shè)計(jì)復(fù)雜性得到了緩解,因?yàn)槟K消除了工程師從頭開(kāi)發(fā)復(fù)雜RF電路的需要。
更好的是,新一代GNSS模塊設(shè)計(jì)用于針對(duì)以前不切實(shí)際的應(yīng)用類(lèi)型,因?yàn)閭鹘y(tǒng)GNSS解決方案的缺點(diǎn)。示例包括可穿戴設(shè)備,智能手表以及價(jià)值相對(duì)較低的物品的資產(chǎn)跟蹤。
設(shè)計(jì)人員在選擇模塊時(shí)應(yīng)考慮的關(guān)鍵因素有:
價(jià)格:根據(jù)體積和其他因素而變化。
位置精度:更好的位置精度依賴在一個(gè)優(yōu)越的時(shí)鐘。設(shè)計(jì)人員應(yīng)將精度與應(yīng)用要求相匹配。
TTFF:獲取衛(wèi)星信號(hào)并計(jì)算模塊首次激活時(shí)的位置所需的時(shí)間。有些模塊擁有預(yù)測(cè)未來(lái)一個(gè)月衛(wèi)星軌道位置的算法,大大縮短了冷啟動(dòng)時(shí)的TTFF。
尺寸:緊湊的尺寸允許將模塊整合到小尺寸中。
功耗:資產(chǎn)跟蹤等應(yīng)用的解決方案通常采用小型電池供電。低功耗將延長(zhǎng)電池壽命。
RF靈敏度:要求在冷啟動(dòng)期間獲取相對(duì)較弱的GNSS信號(hào),需要較高的初始靈敏度。一旦衛(wèi)星被采集并被接收器跟蹤,靈敏度就會(huì)提高。
射頻干擾抗擾度:根據(jù)主機(jī)系統(tǒng)的不同,GNSS工作在1176.45到1602.0 MHz范圍內(nèi),與GSM頻率分配相鄰。需要良好的GSM頻帶抑制以確保良好接收GNSS信號(hào)。
Antenova的Radionova M20050模塊是新一代GNSS模塊的一個(gè)很好的例子(圖1)。該模塊是一個(gè)插入式GNSS接收器,工作頻率為1.575 GHz,尺寸為13.8 x 9.5 x 1.8 mm,可同時(shí)在三個(gè)不同的GNSS系統(tǒng)上運(yùn)行,以提高TTFF和定位精度。該模塊采用2.8至4.2伏電源供電,具有多種低功耗模式,可延長(zhǎng)電池壽命。冷啟動(dòng)后TTFF小于35秒,冷啟動(dòng)靈敏度為-148 dBm(圖1)。
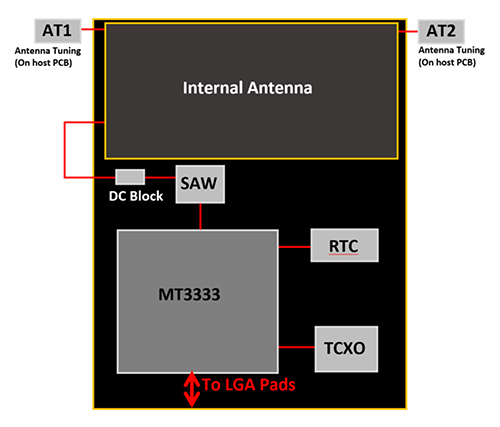
圖1:Antenova的Radionova M20050 GNSS模塊具有內(nèi)置天線,工作頻率為1.575 GHz。 (圖片來(lái)源:Antenova)
該設(shè)備使用NMEA 0183數(shù)據(jù)輸出協(xié)議,這是一項(xiàng)由美國(guó)國(guó)家海洋電子協(xié)會(huì)控制的專(zhuān)有協(xié)議。該協(xié)議使用簡(jiǎn)單的ASCII串行通信,在業(yè)界廣泛用于與GPS接收器的串行連接,并已被谷歌地圖和微軟MapPoint等導(dǎo)航軟件采用。 M20050通過(guò)UART接口以默認(rèn)的9600波特率輸出位置數(shù)據(jù)。
Linx Technologies提供其TM系列GNSS接收器模塊。這些器件的工作電壓為1.575和1.602 GHz,電壓為3.0 V至4.3 V。冷啟動(dòng)時(shí)TTFF小于33秒,冷啟動(dòng)靈敏度為-147 dBm。該器件通過(guò)UART接口使用NMEA 0183協(xié)議,該接口的默認(rèn)速率為9600波特。
器件的內(nèi)核自動(dòng)處理所有必要的初始化,跟蹤和計(jì)算,因此無(wú)需編程。 TM系列的RF部分針對(duì)低電平RF信號(hào)進(jìn)行了優(yōu)化,無(wú)需進(jìn)行生產(chǎn)調(diào)整。
Telit還以Jupiter JF2的形式提供GNSS模塊解決方案。雖然該公司將該設(shè)備列為GNSS產(chǎn)品,但它僅支持美國(guó)的GPS系統(tǒng),盡管也可以使用GLONASS設(shè)備。 Telit模塊基于SiRFstarIV?內(nèi)核,采用1.8伏電源供電,采用11 x 11 x 2.6 mm封裝。 TTFF從冷啟動(dòng)開(kāi)始不到35秒,冷啟動(dòng)靈敏度為-147 dBm。 Telit產(chǎn)品的一個(gè)關(guān)鍵優(yōu)勢(shì)是它可與公司的蜂窩模塊互操作,從而更容易設(shè)計(jì)組合的GPS/蜂窩解決方案(圖2)。
圖2:Telit的Jupiter JF2模塊是最小的集成GNSS接收器之一,盡管它也結(jié)合了蜂窩功能。 (圖片來(lái)源:Telit)
雖然Antenova,Linx Technologies和Telit的模塊簡(jiǎn)化了位置跟蹤系統(tǒng)的設(shè)計(jì),但不是將模塊焊接到印刷電路板上,增加功率和等待第一次修復(fù)。工作系統(tǒng)所需的主要設(shè)計(jì)步驟是天線選擇(如果模塊具有內(nèi)置天線,則進(jìn)行天線調(diào)諧),電源,與適當(dāng)?shù)?a target="_blank">微處理器配對(duì)以及編程。
最大化靈敏度
某些模塊配有內(nèi)置天線,但其他模塊則為開(kāi)發(fā)人員提供了選擇。內(nèi)置天線消除了另一個(gè)設(shè)計(jì)步驟,但不可避免地是一個(gè)“一刀切”的解決方案。將天線選擇留給設(shè)計(jì)人員可以更好地匹配天線與應(yīng)用。
例如,如果模塊適用于手持設(shè)備,天線將以各種方向呈現(xiàn)在天空中,因此具有寬且均勻圖案的天線可以產(chǎn)生比具有更高增益但具有更窄光束的天線更好的整體性能。采用沒(méi)有內(nèi)置天線的模塊,例如Linx Technologies的TM系列,可以進(jìn)行實(shí)驗(yàn)以匹配應(yīng)用。
對(duì)于GNSS應(yīng)用,天線需要良好的右旋圓極化特性以匹配極化衛(wèi)星信號(hào)陶瓷貼片是最常用的天線類(lèi)型,但有許多其他形狀,尺寸和樣式可供選擇。
GNSS應(yīng)用可以采用無(wú)源或有源天線。有源型采用低噪聲放大器(LNA)工作,以提高靈敏度。使用有源天線時(shí),最好添加300歐姆(Ω)鐵氧體磁珠,以將VOUT線連接到RFIN線。該磁珠阻擋來(lái)自電源的RF干擾,同時(shí)允許RF跡線上的DC電壓饋送天線。模塊內(nèi)部的串聯(lián)電容可防止直流電壓影響模塊內(nèi)部LNA的偏置。
確定良好RF電路的關(guān)鍵參數(shù)是阻抗(Z)。必須注意最終產(chǎn)品的印刷電路板布局在模塊和天線之間保持50Ω阻抗路徑。制造商通常在其模塊數(shù)據(jù)表中提供布局指南,以幫助匹配阻抗和天線板間隙,從而最大限度地提高靈敏度(圖3)。
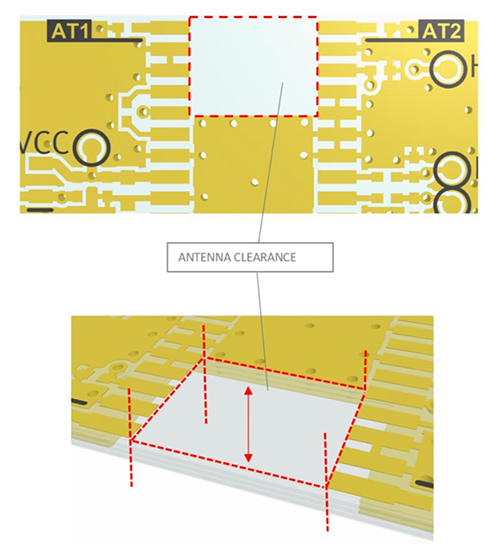
圖3:天線由無(wú)痕跡的印刷電路板區(qū)域促成的間隙對(duì)于最大化靈敏度和改善TTFF非常重要。 (圖像來(lái)源:Antenova)
帶有內(nèi)置天線的模塊,如Antenova的Radionova M20050設(shè)備,可能需要進(jìn)行一些外部調(diào)整,以最大限度地提高靈敏度并加速TTFF。這并不是過(guò)于復(fù)雜,通常需要增加一些無(wú)源元件來(lái)補(bǔ)償由與模塊相鄰的電路板元件引起的輕微天線失諧。對(duì)于Radionova M20050模塊,Antenova通過(guò)在模塊上添加“AT1”和“AT2”輸入來(lái)簡(jiǎn)化過(guò)程,可以連接相應(yīng)的電阻和電感,以調(diào)諧內(nèi)部天線(圖3,再次)。/p>
模塊控制
每個(gè)Antenova,Linx Technologies和Telit模塊必須連接到合適的微處理器進(jìn)行控制和配置。微處理器要求通常適中,中檔16位器件可以勝任。大多數(shù)GNSS模塊通過(guò)串行GPIO或UART進(jìn)行通信,因此請(qǐng)確保所選的微處理器具有一個(gè)或兩個(gè)。
微處理器通常使用前面提到的NMEA協(xié)議與GNSS模塊通信。該協(xié)議定義了三種類(lèi)型的輸入/輸出:命令,寫(xiě)和讀消息。模塊輸出每個(gè)輸入/輸出的響應(yīng)。命令用于更改模塊的運(yùn)行狀態(tài)。寫(xiě)消息改變模塊的配置,讀消息詳細(xì)說(shuō)明當(dāng)前配置。
輸入在RX線上發(fā)送到接收器,輸出從TX線上的接收器發(fā)送。默認(rèn)情況下,輸出消息每秒發(fā)送一次。該協(xié)議允許標(biāo)準(zhǔn)和專(zhuān)有輸入/輸出(圖4)。
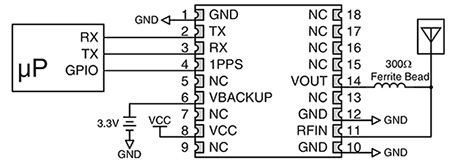
圖4:微處理器通過(guò)GPIO或UART,TX和RX連接與GNSS模塊通信。注意,這里使用一個(gè)300Ω鐵氧體磁珠從電源到有源天線限制射頻干擾)(影像資料來(lái)源:領(lǐng)新技術(shù))
的NMEA協(xié)議的消息結(jié)構(gòu)是簡(jiǎn)單的,例如:
“command-ID [,parameter1,parameter2,...,parameterN] ”用于命令;和“消息-ID, * <校驗(yàn)> ”的消息
為標(biāo)準(zhǔn)消息的消息ID開(kāi)始于NMEA '講話者' ID: “$ GP”表示GPS,“$ GL”表示GLONASS,“$ GN”表示全球?qū)Ш健K鯣NSS模塊通常相呼應(yīng)的命令回給已被執(zhí)行的命令后的主機(jī)處理器。
“$ GPZDA,183746.000,22,08,2017 * 56 ”,例如,是一個(gè)詳細(xì)說(shuō)明通用時(shí)間和日期的GPS消息(2017年8月22日18:37:46.0)。
許多模塊制造商,如Telit,都選擇專(zhuān)有的命令方案。 (“$ P ...”表示這是一個(gè)專(zhuān)有的方案,以及“... STM ...”是制造商的ID,在這種情況下在Telit的木星JF2 GNSS模塊使用的意法半導(dǎo)體芯片。)
命令I(lǐng)D描述$ PSTMINITGPS初始化GPS位置和時(shí)間$ PSTMINITTIME 1 Intialize GPS時(shí)間$ PSTMCLREPHS清除所有的星歷數(shù)據(jù)$ PSTMDUMPEPHEMS轉(zhuǎn)儲(chǔ)emphemeris數(shù)據(jù)$ PSTMEPH負(fù)載的星歷數(shù)據(jù)$ PSTMNMEAONOFF切換NMBA輸出ON和OFF $ PSTMCOLD執(zhí)行冷啟動(dòng)$ PSTMWARM執(zhí)行熱啟動(dòng)$ PSTMHOT執(zhí)行熱啟動(dòng)$ PSTMSRR執(zhí)行系統(tǒng)重置$ PSTMGPSRESET重置GPS引擎$ PSTMGETSWVER獲取GNSS庫(kù)版本$ PSTMSBASONOFF切換SBAS功能ON和OFF $ PSTMSBASSAT選擇SBAS衛(wèi)星PRN碼$ PSTMSETCONSTMASK設(shè)置GNSS星座掩碼
例如:
“$ PSTMCOLD,0x02 ”執(zhí)行冷啟動(dòng)并(可選)清除星歷數(shù)據(jù);和“$ PSTMINITTIME,23,02, 2018,09,44,12 “將當(dāng)前的GPS通用時(shí)間初始化為2018年2月23日的9:44:12。
模塊制造商通過(guò)提供評(píng)估套件簡(jiǎn)化了開(kāi)發(fā)過(guò)程如果模塊具有內(nèi)置天線,則包含GNSS模塊并包括天線或天線調(diào)諧。例如,Antenova提供M20048 RF模塊評(píng)估板,Linx Technologies為T(mén)M系列提供MDEV-GNSS-TM開(kāi)發(fā)套件。在評(píng)估模塊時(shí),評(píng)估模塊都不需要微處理器,因?yàn)樵u(píng)估套件直接連接到PC的USB端口,PC隨后提供輸入消息和監(jiān)控操作(圖6)。
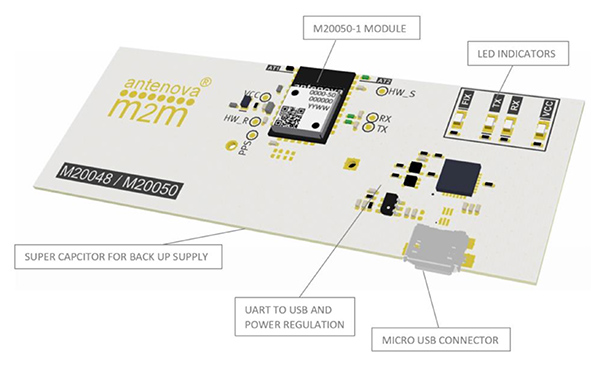
圖6:Antenova的M20048評(píng)估套件包括一個(gè)微型USB接口,可通過(guò)PC進(jìn)行控制和配置。 (圖像來(lái)源:Antenova)
正確供電GNSS模塊至關(guān)重要
由于需要檢測(cè)微弱的RF信號(hào),GNSS模塊需要干凈,穩(wěn)定的電源以確保高信號(hào)噪聲比(SNR)。規(guī)格根據(jù)所選的GNSS模塊而有所不同,但一般來(lái)說(shuō),峰值噪聲應(yīng)保持在20毫伏(mV)以下以避免出現(xiàn)問(wèn)題。
雖然一些GNSS模塊包含一個(gè)板載穩(wěn)壓器,但它是建議使用外部主調(diào)節(jié)器為模塊供電。如果選擇開(kāi)關(guān)模式電壓調(diào)節(jié)器來(lái)提高效率并延長(zhǎng)電池壽命,設(shè)計(jì)人員應(yīng)考慮將器件與低壓差(LDO)線性穩(wěn)壓器結(jié)合使用,以限制GNSS模塊電壓輸入的噪聲。
如果效率不是一個(gè)挑戰(zhàn),單獨(dú)使用LDO穩(wěn)壓器是一個(gè)不錯(cuò)的選擇,因?yàn)椴牧锨鍐谓档土耍⑶曳€(wěn)壓輸出比開(kāi)關(guān)穩(wěn)壓器更清潔。無(wú)論電壓調(diào)節(jié)器選擇如何,采用濾波器電路來(lái)清理輸入電壓也是一種很好的設(shè)計(jì)實(shí)踐。
GNSS模塊(例如,M20050)通常包括兩個(gè)電壓輸入,一個(gè)用于為主數(shù)字電源供電和處理電路以及第二個(gè)為RAM和時(shí)鐘提供備份。
除了控制和配置GNSS模塊外,主機(jī)微處理器還管理電源模式以幫助延長(zhǎng)電池壽命。例如,M20050模塊支持三種這樣的模式:備用,備份和定期。待機(jī)關(guān)閉模塊的RF部分并使處理器處于待機(jī)狀態(tài)。時(shí)鐘和RAM保持供電以維持模塊配置。
主電壓輸入關(guān)閉時(shí)進(jìn)入備份模式。當(dāng)模塊從省電(休眠)模式喚醒時(shí),此模式用于輔助快速TTFF,因?yàn)闅v史星歷數(shù)據(jù)保留在模塊的RAM中。
周期模式通過(guò)短時(shí)間喚醒模塊來(lái)降低電流消耗重新建立衛(wèi)星修復(fù),然后返回睡眠模式。此模式對(duì)于加速TTFF非常有用,因?yàn)樾菤v數(shù)據(jù)會(huì)定期刷新而不是僅保留(圖7)。
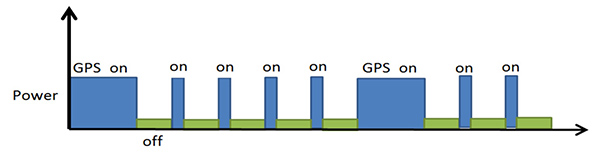
圖7:周期模式可以頻繁刷新星歷數(shù)據(jù),以確保激活GNSS模塊時(shí)的快速TTFF。 (圖片來(lái)源:Antenova)
結(jié)論
國(guó)際衛(wèi)星導(dǎo)航系統(tǒng)的激增增加了GNSS對(duì)精確位置跟蹤的可訪問(wèn)性和準(zhǔn)確性。雖然GNSS系統(tǒng)的設(shè)計(jì)并不容易,但GNSS模塊通過(guò)提供經(jīng)過(guò)組裝,測(cè)試和驗(yàn)證的資產(chǎn)跟蹤解決方案,大大簡(jiǎn)化了問(wèn)題。
-
微控制器
+關(guān)注
關(guān)注
48文章
7571瀏覽量
151632 -
通信
+關(guān)注
關(guān)注
18文章
6043瀏覽量
136151 -
GNSS
+關(guān)注
關(guān)注
9文章
776瀏覽量
48015
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
采用GNSS天線模塊設(shè)計(jì)衛(wèi)星定位系統(tǒng)
GNSS 多星定位原理及校正方式對(duì)比
TAU1312 多系統(tǒng)多頻 RTK 定位模塊
SKYLAB:一文了解幾款常用的GNSS定位模塊
F系列GNSS定位模塊賦能智能交通
微雪電子GNSS GPS定位模塊簡(jiǎn)介
外置GNSS定位模塊天線一體化GNSS定位產(chǎn)品的選型要點(diǎn)
高精度車(chē)載GNSS定位導(dǎo)航模塊怎么選,車(chē)載導(dǎo)航定位模塊介紹
GNSS定位模塊的應(yīng)用場(chǎng)景及選型建議

GNSS模塊在“車(chē)輛定位”的應(yīng)用
什么是GNSS模塊,有哪些特點(diǎn)
如何安裝GNSS模塊并實(shí)現(xiàn)高精度定位?
GNSS RTK實(shí)時(shí)差分人員定位系統(tǒng)組成部分包括哪些?答案在這里






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論