") 利用計算機視覺、深度強化學(xué)習(xí)和Unity 3D游戲引擎開發(fā)一款自主收集垃圾的機器人
利用計算機視覺、深度強化學(xué)習(xí)和Unity 3D游戲引擎開發(fā)一款自主收集垃圾的機器人
喜歡科幻的小伙伴肯定看過《機器人總動員》,男主角“瓦力”是一名地球廢品分裝員,每天在已經(jīng)成為了“垃圾場”的地球兢兢業(yè)業(yè)的收拾人類留下的“爛攤子”。
瓦力是名副其實的智能機器人,除了動作靈活之外,還擁有意識和情感。要不然也不會泡上了有著雞蛋外形的Eva。
但是,畢竟那是發(fā)生在2805年的事情。那時候人類都已經(jīng)可以開啟宇宙之旅了,設(shè)計個智能機器人還不是分分鐘的事情。
在2019年,造不出擁有情感的機器人,但是用AI模型訓(xùn)練出收拾垃圾的機器人,還是可以的。
一位名叫Damian Bogunowicz的慕尼黑工業(yè)大學(xué)碩士生,和他的小伙伴一起利用計算機視覺、深度強化學(xué)習(xí)和Unity 3D游戲引擎開發(fā)了一款自主收集垃圾的機器人。
據(jù)Damian的博客介紹,他的這個想法最初來自慕尼黑工業(yè)大學(xué)博士研究會。這群參會的“高端玩家”都很愛喝啤酒,也是慕尼黑啤酒節(jié)的常客。但是,看到每年慕尼黑啤酒節(jié)狂歡過后一片狼藉,他們陷入了深思........
通常,這些垃圾都是清潔工人收拾,會耗費大量的人力、物力。
Damian由此想到,是否能開發(fā)出一款智能機器人,全天候、高效率的幫助這些清潔工人,那么他們的工作效率就會成幾何倍數(shù)增長。
環(huán)境和目標(biāo)設(shè)置
說干就干!
他們的第一步是使用Unity 3D游戲引擎模擬機器人,此外,還使用Unity Machine Learning Agents Toolkit(ML-Agents)插件,使游戲場景成為訓(xùn)練智能體的環(huán)境。
在這個實驗中,他們將機器人的目標(biāo)設(shè)置為探索環(huán)境并學(xué)習(xí)正確的策略。然后設(shè)定一系列的獎勵和懲罰。
主要來說,機器人有兩個目標(biāo):
接近并收集垃圾,例如面包渣、塑料袋以及香腸等食物殘渣。
不要與桌子和椅子發(fā)生碰撞,不要回收木托盤等物品因為這不屬于房間內(nèi)的垃圾。
在模擬環(huán)境中,機器人的形狀是正方體,主要有三個動作:
平移運動(向前、向后以及保持靜止)
轉(zhuǎn)向運動(左轉(zhuǎn)、右轉(zhuǎn))
抓取狀態(tài)。
前兩個動作非常簡單,抓取狀態(tài)需要設(shè)計。總的來說,每次機器人決定收集一個物體時候需要滿足下面兩個條件:
1.物體必須靠近機器人的前部(限制在具有綠色邊緣的體積內(nèi))
2.機器人必須決定激活“抓取器”。當(dāng)抓取狀態(tài)被激活時,機器人的顏色從白色變?yōu)榧t色。
懲罰和獎勵
機器人可以通過與環(huán)境的交互和反饋的信號來學(xué)習(xí)正確的策略。對此系統(tǒng)來說,懲罰值在-1~0之間浮動,獎勵值在0~1之間浮動。與其他強化學(xué)習(xí)不同的是,要在訓(xùn)練數(shù)據(jù)的時候迅速獲得最好的策略,次要目標(biāo)給予較小的獎勵值。當(dāng)學(xué)習(xí)復(fù)雜任務(wù)時,從簡單任務(wù)入手,逐漸增加任務(wù)難度。
這些都可以在Unity ML-Agents中輕松能夠?qū)崿F(xiàn),具體來說將任務(wù)分為兩個子目標(biāo),在環(huán)境中搜索垃圾、判斷何時激活抓取狀態(tài)。
算法訓(xùn)練與模擬
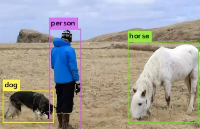
機器人最初不太能分清楚要將哪種物品歸為垃圾,后來,通過網(wǎng)絡(luò)將RBG圖像映射到語義分割圖,能夠有效獲得此信息。用數(shù)據(jù)通過Semantic Segmentation Suite訓(xùn)練SegNet,易于調(diào)試和修改,從而節(jié)省算力。
另外,語義分割信息不是來自外部神經(jīng)網(wǎng)絡(luò)。它是使用Unity中的著色器生成的,使用標(biāo)簽對對象進行分段。這意味著智能體在訓(xùn)練期間可以快速接收有關(guān)對象類的可靠,無噪聲的信息。
機器人認(rèn)知的核心是“大腦”,這是決定智能體如何行動的部分。鑒于當(dāng)前的環(huán)境狀況和要實現(xiàn)的目標(biāo),采用以下兩種方法:
1.近端策略優(yōu)化,它通過與環(huán)境的交互作用在采樣數(shù)據(jù)之間進行交互,并利用隨機梯度上升優(yōu)化目標(biāo)函數(shù)。
2.讓系統(tǒng)觀察正確的行為并進行模仿。這可以視為監(jiān)督學(xué)習(xí),研究人員先“玩游戲”一段時間,以便智能體能夠?qū)W習(xí)正確的策略。
另外,利用Unity ML-Agents提供的另外兩個解決方案:
1.使用循環(huán)神經(jīng)網(wǎng)絡(luò)的內(nèi)存增強代理,這可以允許智能體不僅可以對當(dāng)前的輸入進行操作,還可以“記住”最后的輸入并在做出決策時將此附加信息包含在其推理決策中。
2.利用好奇心,賦予智能體一種好奇心,每當(dāng)它發(fā)現(xiàn)與其當(dāng)前知識不同的東西時,它會給予機器人內(nèi)部獎勵。這鼓勵智能體探索世界時,更加“冒險”。
到目前為止,智能體已經(jīng)設(shè)法自己弄清楚了這兩項任務(wù)。但只是為了好玩(或者為了加快訓(xùn)練過程),可以“硬編碼”第二個目標(biāo) 。關(guān)于是否激活抓取機制設(shè)定一個簡單的函數(shù),它考慮了兩個因素:我們面前的對象類(由語義分割圖定義);物體與機器人的距離(由深度圖提供)。
此功能可以通過以下方式進行硬編碼:從當(dāng)前深度圖中,僅濾除屬于“可收集”類的那些。另外檢查像素最大值是否大于某個設(shè)定閾值。如果是,可收集物體足夠接近智能體,完成收集。
啟發(fā)式背后的決策
未來的大規(guī)模應(yīng)用
以上模擬在虛擬環(huán)境中有較好的效果,但是如果想要大規(guī)模的應(yīng)用到商業(yè),還需一系列的改進。
Damian也給出了一些自己的想法:
1.安裝一系列用于垃圾回收的硬件,在機械設(shè)計上應(yīng)該考慮到足夠的細(xì)節(jié),例如安裝一個“鏟子”,可以無縫地將垃圾推入機器人的“腹部”,又或者在容器滿了之后,如何處理垃圾。
2.將該算法部署在一臺能夠處理實時語義分割的機器上,語義分割模型的推理時間太慢,一般的筆記本電腦無法進行實時仿真。
3.用RealSense攝像機將信息從仿真平臺傳遞給真實的機器人,這一部分工作是將在物理環(huán)境中部署機器人,這意味著通過在現(xiàn)實世界中運行機器人來微調(diào)算法,目前,強化學(xué)習(xí)在機器人技術(shù)中的應(yīng)用還處于實驗階段。
“撿垃圾”機器人的其他妙用
收拾東西這件事情,可不僅僅是“慕尼黑啤酒節(jié)“才需要,應(yīng)用場景還相當(dāng)多,比如,周末大爬梯后的家。
其實,在幫你疊衣服,幫你把散落在地上的物品規(guī)整起來方面,智能機器人也已經(jīng)可以做的很成熟。
在CEATEC JAPAN 2018會展上,由豐田汽車有限公司開發(fā)的“生活支援機器人HSR(Human Support Robot)”,展示了“全自動整理機器人系統(tǒng)”。
其利用深度學(xué)習(xí)技術(shù)開發(fā)的畫面識別引擎,哪怕數(shù)百種物品散亂在房間各處,引擎也能夠識別出物品的位置和種類。基于該識別引擎,人們可以規(guī)劃什么物體應(yīng)該怎么去抓取以及如何整理等等。
該圖像識別引擎是通過采用了深度學(xué)習(xí)框架Chainer,ChainerMN以及ChainerCV的CNN(卷積神經(jīng)網(wǎng)絡(luò))來實現(xiàn)的。
這是安裝在機器人上的攝像頭的視點圖像以及識別結(jié)果的可視化動畫。通過顯示機器人所識別的房間地圖和當(dāng)前位置,我們可以看到機器人是如何識別房間的。
系統(tǒng)能夠穩(wěn)定地抓取各種形狀和材質(zhì)的物體并且放置到規(guī)定的地方。
比如在整理圓珠筆時,攝像頭尋找筆筒位置,識別圓珠筆的朝向,調(diào)整朝向,放入筆筒。
系統(tǒng)通過不斷地重復(fù)人類在無意識中做出的一系列的判斷最終使之成為可能。
通過增強現(xiàn)實(AR),我們可以看到機器人是如何思考的,比如顯示機器人是如何識別房間里的狀況,接著會如何行動等信息。通過AR畫面,我們能夠更加直觀地把握機器人的狀態(tài),從而發(fā)出更確切的指令。
在大會上,這款機器人獲得了“CEATEC AWARD 2018”的獎項里的行業(yè)/市場部門的二等獎。
可能以后不僅清潔工,連收拾房子的保潔阿姨都不需要了。
-
機器人
+關(guān)注
關(guān)注
211文章
28556瀏覽量
207659 -
計算機視覺
+關(guān)注
關(guān)注
8文章
1699瀏覽量
46049 -
強化學(xué)習(xí)
+關(guān)注
關(guān)注
4文章
268瀏覽量
11273 -
Unity
+關(guān)注
關(guān)注
1文章
127瀏覽量
21841
原文標(biāo)題:被啤酒節(jié)遺留垃圾嚇到,德國小哥發(fā)明現(xiàn)實版“瓦力”清潔機器人
文章出處:【微信號:BigDataDigest,微信公眾號:大數(shù)據(jù)文摘】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
【「具身智能機器人系統(tǒng)」閱讀體驗】+兩本互為支持的書
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎(chǔ)模塊
【小白入門必看】一文讀懂深度學(xué)習(xí)計算機視覺技術(shù)及學(xué)習(xí)路線
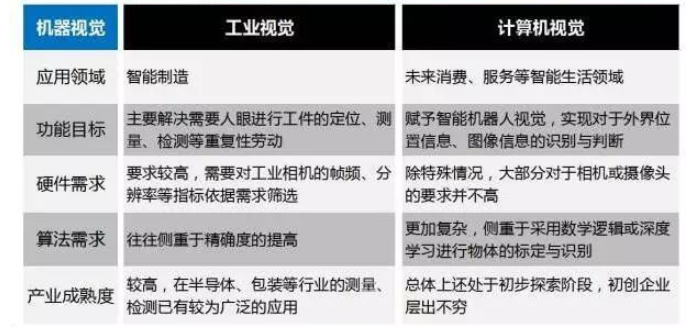
機器人視覺與計算機視覺的區(qū)別與聯(lián)系
深度學(xué)習(xí)在計算機視覺領(lǐng)域的應(yīng)用
OpenCV攜奧比中光3D相機亮相CVPR 2024
計算機視覺的主要研究方向
計算機視覺與圖像處理、模式識別、機器學(xué)習(xí)學(xué)科之間的關(guān)系

一款可以控制復(fù)合機器人3D視覺抓取的工業(yè)軟件#工業(yè)軟件 #工業(yè)機器人 #3D視覺
工業(yè)視覺與計算機視覺的區(qū)別





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論