 并聯機器人的應用
并聯機器人的應用
近年來,隨著同行業內各個企業之間的競爭形勢日益激烈,人力成本的不斷上升,越來越多的傳統制造企業愿意把更多工業機器人引入工廠,進一步提升工業生產效率,促進產業結構的智能化調整。在這個過程中,并聯機器人因其剛度高、速度快、柔性強、重量輕等優點,在食品、藥品、3C、電子等輕工業中應用最為廣泛,在物料的理料、分揀、裝箱、轉運等方面有著無可比擬的優勢。
常見的分揀工藝,并聯機器人結合傳感器、工業相機、編碼器等外界感應識別系統,對來料按照特定條件進行快速分揀,大致可分為以下兩類:
①按照不同形狀、顏色進行分類分揀
②根據要求的質量、形狀進行篩選分揀
高效率的分揀前提條件之一就是較為嚴格的來料位姿和速度,也因此使理料成為工藝中至關重要的環節。但是,理料環節設計過為簡單會直接影響分揀效率,過為復雜則對項目投入成本及占地等方面造成客戶的負擔。勃肯特從實際應用案例出發,為您提供非常規分揀的解決方案。
1、 當來料出現堆疊擺放,前端理料的設計不再是必須
使用常規方式無法分揀堆疊來料的根本原因,在于堆疊物料的平面投影輪廓和2D相機視覺系統既定輪廓的差異,而差異的出現會導致機器人缺失來料物品的明確坐標信息,最終導致漏料;此外,即使配備3D視覺,并聯機器人受末端自由度的限制,也無法進行空間更大自由度的拾放。
串并混聯六自由度機器人為一種"3P-3R"的新型結構機器人,具備了串聯機器人的靈活性和并聯機器人高速的特性,末端J4、J5、J6軸分別可進行空間±360°、±150°、±360°旋轉,配合3D視覺識別系統,在三維空間中標定堆疊物料的位姿及定位坐標,進行空間六自由度的抓取。理料分揀一機兩用,前端無需再增加理料工序,可大大減少了客戶在生產線成本上的投入。
(3D視覺配合串并混六軸分揀工藝)
2、 并聯機器人也可以做到把平置的物品豎起來
相較串并混聯六軸結構減少了1個自由度的“3P-2R"的串并混聯五軸機器人的應用則更為廣泛。結構包括定平臺、串聯運動單元、并聯運動單元和動平臺,其中,串聯運動單元通過安裝在定平臺旋轉電機,經伸縮傳動軸帶動,實現安裝在動平臺上的兩組平行輸入軸進行嵌套式傳動機構,使得輸出部分可以分別末端完成J4、J5軸運轉。
較為常見的工藝表現就是拾取平置的物料豎直放置,且因兼具機器人可柔性作業的優勢,可根據設定好的擺放要求,如瓶身高度的差異、瓶型的差異等,完成多種來料的差異化放置,從而提升產線在應用中的多樣性,可謂一次投入多種使用,在食品、藥品、日化等行業應用廣泛。
(串并混五軸分揀裝托工藝)
3、 當來料過于密集,末端回料裝置可以沒有
所謂“循環”分揀就是,當來料密集的情況下,針對常規分揀設計中為了防止出現機器人漏抓時需增加回料裝置的問題,以圓形物料流轉路線為基礎,來建立機器人本體視覺識別以及末端軌跡移動方式。這就是勃肯特針對客戶最新應用場景推出的圓盤抓取方式。
圓盤抓取這項"特殊"抓取方式的實現,打破了部分被壟斷的技術壁壘,在國內機器人行業中的應用屬于首創,可有效解決傳送帶占地面積大、來料密集時漏料等問題。圓盤抓取實現的技術難點在于,并聯機器人根據視覺系統、編碼器提供的來料在圓盤上的位姿、運動速度的信息,通過運用圓形軌跡追蹤算法,以圓盤中心建立工件坐標系,配合視覺系統提供的信息實時轉換末端執行器的軌跡,來實現機器人在圓形主轉盤上追蹤、抓取物件。
(圓盤抓取技術)
就目前形勢分析,因為工業機器人和人工成本剪刀差擴大,導致“機器換人”大勢所趨,在傳統工業生產的基礎上實現機器對人的替換,也僅僅只是完成了工業自動化的第一步。勃肯特從生產型企業的角度出發,不斷創新、優化自身產品性能,將視角集中在改善客戶生產效率的同時,深挖客戶痛點,將在2019年將陸續提供更多諸如圓盤抓取類的應用型技術,為客戶提供更多節省成本性的解決方案。
-
機器人
+關注
關注
211文章
28418瀏覽量
207105 -
并聯機器人
+關注
關注
4文章
60瀏覽量
15234
原文標題:【馳眾機器人 | 技術】并聯機器人應用詳解-分揀
文章出處:【微信號:gaogongrobot,微信公眾號:高工機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
并聯機器人如何優化、簡化電子制造流程

并聯機器人快速準確拾取物體
分享一款不錯的基于LabVIEW的6-DOF并聯機器人控制系統
并聯機器人的特點及其運動模擬器等相關設計的介紹
基于并聯機器人非線性方程求解

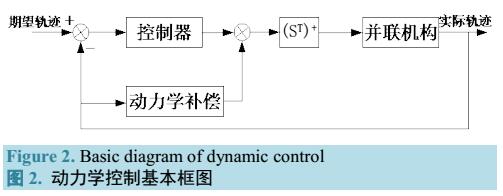
二自由度冗余驅動并聯機器人動態控制
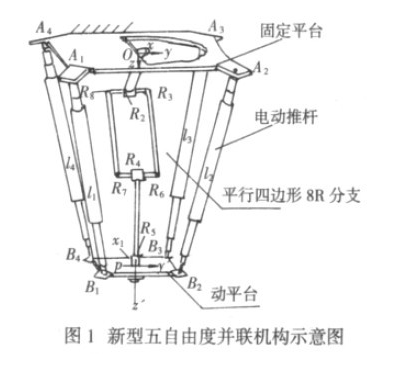
運用BLDC對新型五自由度并聯機器人的設計





 工商網監
工商網監
評論