 在太陽能應用中采用ADI信號鏈實現隔離測量技術
在太陽能應用中采用ADI信號鏈實現隔離測量技術
太陽能應用中的電壓和電流測量需采用隔離測量技術。DSP Sinc輸入以及ADIAD7401A隔離式ADC恰好提供ADI信號鏈的一個示例,實現這種隔離測量。本文介紹采用ADSP-CM403xy和AD7401A器件,并由ADI設計的測量應用典型信號鏈。
太陽能光伏逆變器系統
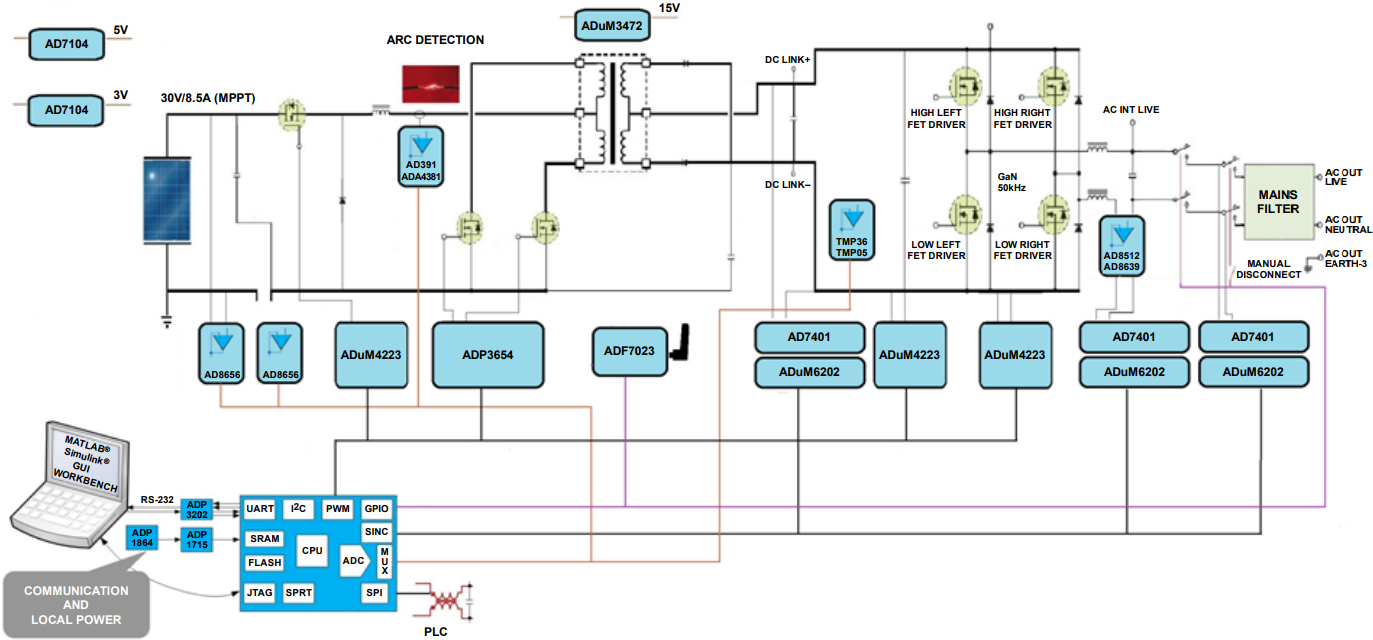
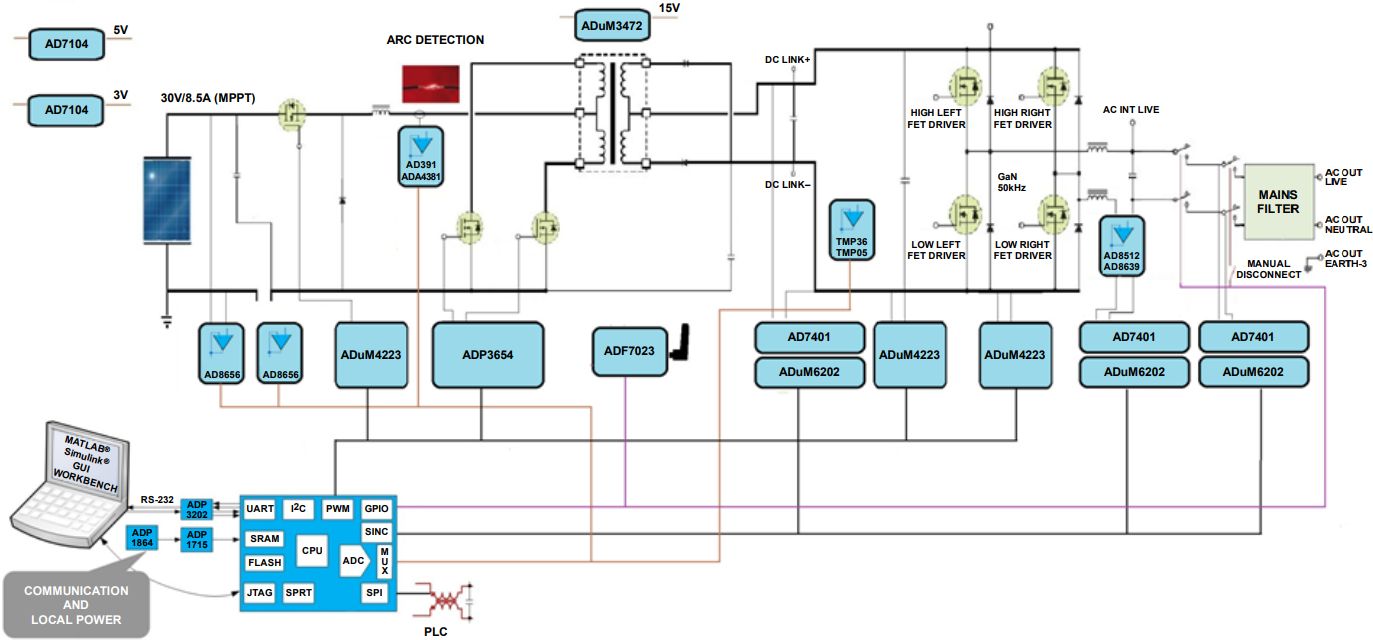
太陽能光伏逆變器轉換來自太陽能面板的電能并高效地將其部署到公用電網中。來自太陽能面板的電能基本上屬于直流源,它會被轉換成交流,并與電網頻率成一定的相位關系,饋送至公用電網上,且效率極高。轉換可以采用單級,也可以采用多級(見圖1)。第1級通常為DC-DC轉換,其中太陽能面板的低電壓與高電流輸出轉換為高電壓與低電流。這樣做的目的是為了將電壓提升至與電網峰值電壓兼容的水平。第2級通常將直流電壓和電流轉換為交流電壓和電流,一般使用H-電橋拓撲。
ADC理論—AD7401A
AD7401A是一款二階Σ-Δ調制器,片上的數字隔離采用ADI公司的iCoupler? 技術,能將模擬輸入信號轉換為高速1位數據流。AD7401A采用5 V電源供電,可輸入±250 mV的差分信號(滿量程±320 mV)。模擬調制器對模擬輸入信號連續采樣,因而無需外部采樣保持電路。輸入信息以數據流密度的形式包含在輸出數據流內,該數據流的最高數據速率可到20 MHz。通過適當的數字濾波器(稱為Sinc濾波器)可重構原始信息。處理器側(非隔離)可采用5 V或3 V電源 (VDD2)。
示例電路 – 描述
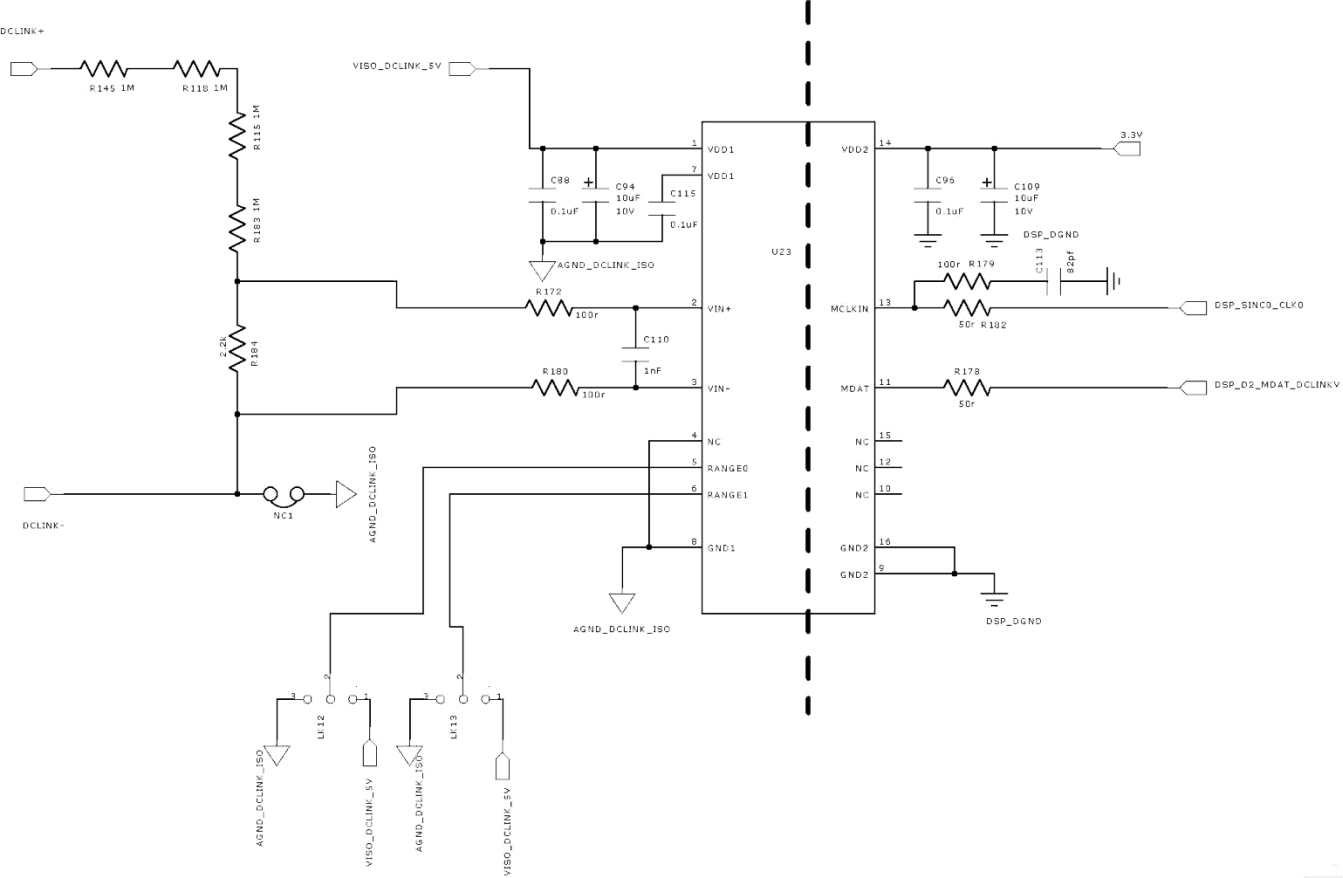
Σ-Δ 調制器的交流輸入是一個交流正弦波,表示單相電網發出的220 V rms信號。電阻分頻器將輸入范圍縮小到ADC的額定輸入范圍。輸入濾波器可降低輸入端的噪聲。
Σ-Δ 調制器輸出包含兩個信號:來自ADSP-CM403xyDSP處理器的高速時鐘輸入,以及保持調制數據的數據信號。該數據可直接輸入Sinc3濾波器,直接將數據轉換為ADC結果。下文顯示該數據的一個示例。
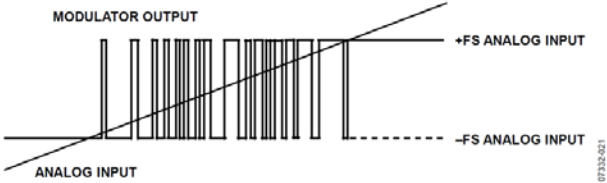
在ADC的下限范圍內,輸入信號具有窄脈沖寬度,而在上限范圍內脈沖寬度幾乎達到其最大值。輸出數據通過Sinc濾波器后,便如對角線所示。AD7401A工作電壓高達891 V單極性范圍,或565 V雙極性范圍,并橫跨隔離柵:20μm聚酰亞胺。更多有關這些內容的信息以及各種認證可在相關數據手冊中找到。
ADSP-CM403XY SINC3外設模塊
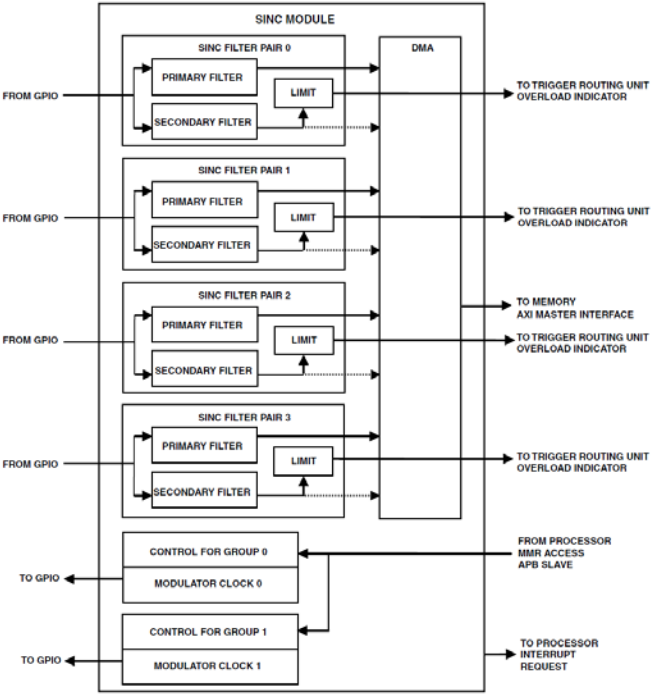
框圖顯示4對Sinc濾波器(Sinc0至Sinc3)、2個調制器時鐘源和2組控制寄存器(單元)。模塊接受4路來自GPIO輸入引腳的Σ-Δ 位流,并將2個調制器時鐘源導入GPIO輸出引腳。脈沖寬度調制(PWM)信號使調制器時鐘同步,以獲得最佳的系統性能。每個Sinc濾波器對均包含初級濾波器、次級濾波器、DMA接口和過載限值檢測功能。初級Sinc濾波器通過DMA將其數據傳輸至存儲器。次級Sinc濾波器產生過載信號,可通過觸發路由單元(TRU)路由該信號,使PWM調制器產生跳變,生成中斷。
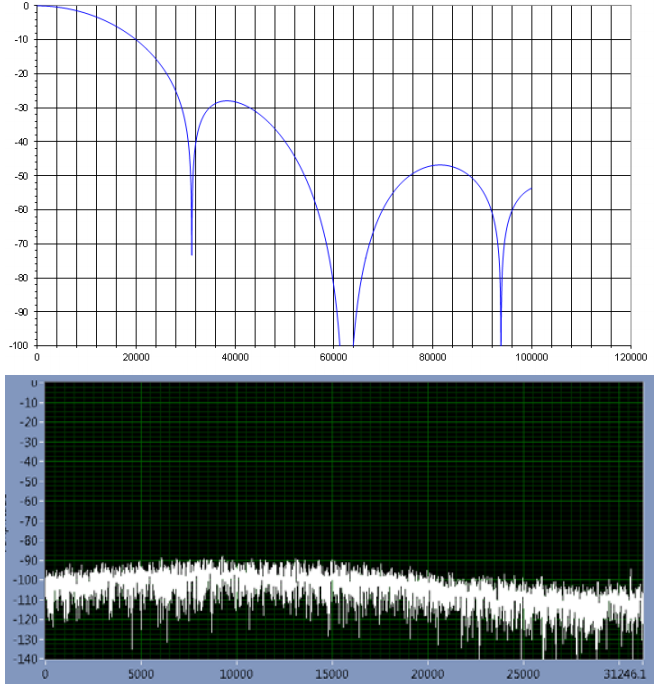
使用AD7401A時,器件額定抽取速率(DR)為256,但也可在其他抽取速率下使用該器件。
對于DR=256的情況而言,Sinc3濾波器的響應見下文中的圖5a和5b。
數字濾波器
Sinc濾波器的傳遞函數使其能用在數字邏輯中(使用一系列求和與抽取函數)。使用濾波器移除調制器采樣時鐘,恢復采樣信號的數字值。濾波器設計匹配雙極性Σ-Δ 調制器,0 V輸入下具有50%脈沖密度,正輸入時超過50%,而負輸入時不足50%,如圖6所示。
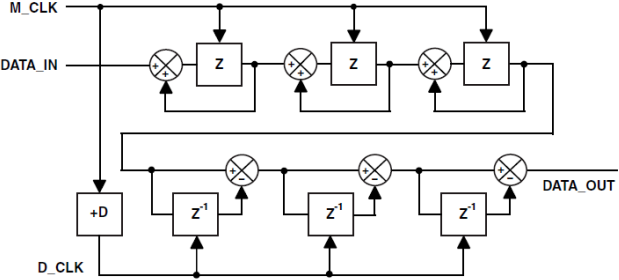
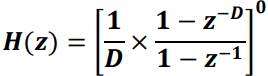
數字濾波器是一組累加器,由調制器時鐘(M_CLK)驅動,后接一組由抽取時鐘(D_CLK)驅動的微分器。 輸入累加器將輸入位流轉換為多字節字,而輸出微分器獲取位流的均值1密度。
累加器和微分器的級數可以為3或4,具體取決于濾波器階數。濾波器的直流增益和帶寬為濾波器階數(O)和抽取速率(D)的函數,即調制器時鐘與抽取時鐘的比值。Sinc濾波器傳遞函數由累加器與微分器的傳遞函數之積確定,Z域內的表達式為:
PWM和SINC數據對齊
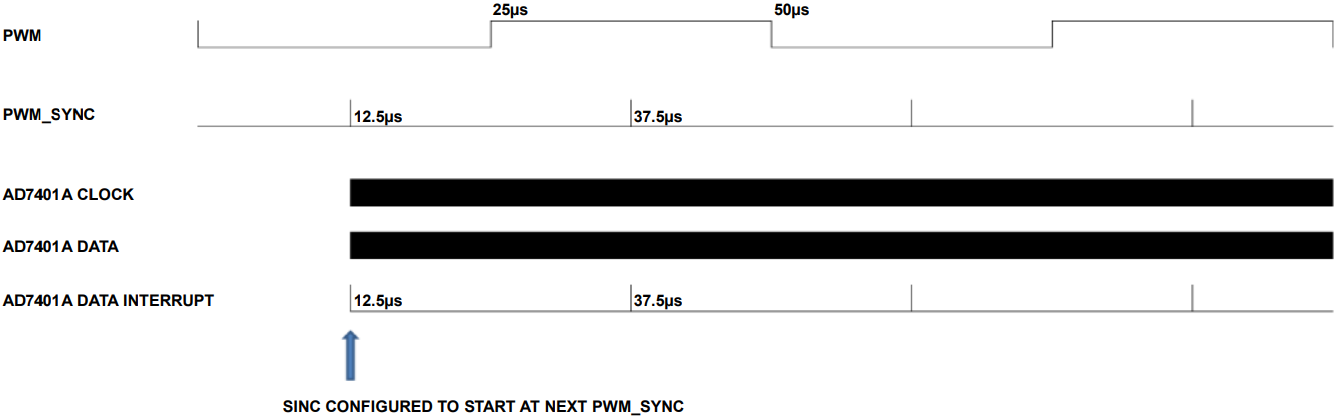
Sinc外設時鐘和PWM本質上運行在同樣的ADSP-CM403系統時鐘下,典型值為100 MHz。PWM和Sinc可以同步以便提供數據,并且時間與速率恰好和控制算法一致。通常與PWM電平波形對齊。下圖顯示使用Sinc輸入進行電網同步所需時序的示例。當PWM運行在20 kHz (50 μs)時,PWM_SYNC信號(同步不同DSP的PWM模塊或外部PWM時需要用到該信號)位于PWM波形中央,幾乎不發生切換。若要對齊Sinc數據,則AD7401A的時鐘速率應設為10.24 MHz,并且抽取速率為256(見AD7401A數據手冊)。這將產生40 KHz (50μs)的16位字速率,兩倍于PWM頻率。由于Sinc還可設為與PWM_SYNC輸出對齊(如下框圖所示),Sinc現在能在每個PWM周期內產生兩個數據輸出。輸出字在SRAM中可用, 位置在下一個PWM_SYNC信號位置處。顯然,它說明Sinc數據可用于電網同步算法控制中。
編程示例
/* SPECIFY DECIMATION RATE OPTIONS */
/* 256 */
// RESULT = ADI_SINC_SETRATECONTROL (DEV, ADI_SINC_GROUP_0, ADI_SINC_FILTER_PRIMARY,DECRATE_256, 0);
// RESULT = ADI_SINC_SETLEVELCONTROL (DEV, ADI_SINC_GROUP_0, 0, 0, SAMPLECOUNT_INTRATE, PSCALE_256); // PCINT INT RATE
/* 128 */
RESULT = ADI_SINC_SETLEVELCONTROL (DEV, ADI_SINC_GROUP_0, 0, 0, SAMPLECOUNT_INTRATE, PSCALE_128); // PCINT INT RATE
RESULT = ADI_SINC_SETRATECONTROL (DEV, ADI_SINC_GROUP_0, ADI_SINC_FILTER_PRIMARY,DECRATE_128, 0);
/* 64 */
RESULT = ADI_SINC_SETLEVELCONTROL (DEV, ADI_SINC_GROUP_0, 0, 0, SAMPLECOUNT_INTRATE, PSCALE_64); // PCINT INT RATE
RESULT = ADI_SINC_SETRATECONTROL (DEV, ADI_SINC_GROUP_0, ADI_SINC_FILTER_PRIMARY,DECRATE_64, 0);
/* SET SECONDARY RATE CONTROL “/
RESULT = ADI_SINC_SETRATECONTROL (DEV, ADI_SINC_GROUP_0, ADI_SINC_FILTER_SECONDARY, 8, 0);
RESULT = ADI_SINC_SETFILTERORDER (DEV, ADI_SINC_GROUP_0, ADI_SINC_FILTER_THIRD_ORDER, ADI_SINC_FILTER_THIRD_ORDER); RESULT = ADI_SINC_SETCIRCBUFFER(DEV, ADI_SINC_GROUP_0, SINC_CIRCBUFFER, CIRC_BUF_SIZE);
/* SET OVERLOAD AMPLITUDE DETECTION LIMITS TO 0 – FULLSCALE */
RESULT = ADI_SINC_SETAMPLITUDELIMIT (DEV, ADI_SINC_PAIR_0, 0X0000, 0XFFFF);
RESULT = ADI_SINC_SETAMPLITUDELIMIT (DEV, ADI_SINC_PAIR_1, 0X0000, 0XFFFF);
RESULT = ADI_SINC_SETAMPLITUDELIMIT (DEV, ADI_SINC_PAIR_2, 0X0000, 0XFFFF);
RESULT = ADI_SINC_SETAMPLITUDELIMIT (DEV, ADI_SINC_PAIR_3, 0X0000, 0XFFFF);
/* SPECIFY MODULATOR CLOCK FREQUENCY, PHASE & STARTUP SYNCHRONIZATION */
RESULT = ADI_SINC_CONFIGMODCLOCK (DEV, ADI_SINC_GROUP_0, FSYSCLK, MODCLK, 0, FALSE); // UP TO 20MHZ
/* IT’S THE SAME CLOCK AS THE PWM – SO PWM AND SINC ARE SYNCHRONOUS */
RESULT = ADI_SINC_ENABLEMODCLOCK (DEV, ADI_SINC_GROUP_0, ADI_SINC_MOD_CLK_IMMEDIATE );
/* ASSIGN BUFFERS TO RECEIVE SINC DATA-AUTOMATICALLY DMA’D INTO SRAM IN THE ADSP-CM403*/
RESULT = ADI_SINC_SUBMITBUFFER(DEV, ADI_SINC_GROUP_0, SINCDATA0, NUM_SAMPLES);
/* ROUTE THE TRU INTERRUPT */
RESULT = ADI_SINC_ENABLEDATAINTERRUPT (DEV, ADI_SINC_GROUP_0, ADI_SINC_DATA_INT_0, TRUE);
/* ENABLE & ASSIGN USED SINC FILTER PAIR, AND SPECIFY INTERRUPT MASKS */
RESULT = ADI_SINC_SETCONTROLINTMASK (DEV, ADI_SINC_INT_EPCNT0|ADI_SINC_INT_EFOVF0|ADI_SINC_INT_EPCNT1|ADI_SINC_INT_EFOVF1);
RESULT = ADI_SINC_ENABLEPAIR(DEV, ADI_SINC_PAIR_0, ADI_SINC_GROUP_0, TRUE); // ACV_EXTERNAL
RESULT = ADI_SINC_ENABLEPAIR(DEV, ADI_SINC_PAIR_1, ADI_SINC_GROUP_0, TRUE); // ACV_INTERNAL
RESULT = ADI_SINC_ENABLEPAIR(DEV, ADI_SINC_PAIR_2, ADI_SINC_GROUP_0, TRUE); // DC LINK
RESULT = ADI_SINC_ENABLEPAIR(DEV, ADI_SINC_PAIR_3, ADI_SINC_GROUP_0, TRUE); // AC_CURRENT
/* WAIT AND READ FULL SINE WAVE INTO SRAM – START NEAR AC CROSSOVER. */
DO
{
PWM_SINC_LOOP=0;
GET_ADC_DATA_PWM();
}
WHILE ((SINC_VEXT_DATA[0] 》 50) || (SINC_VEXT_DATA[0] 《 -50)) ; // START SINC AT 0 V MEASUREMENT-ALIGNS WITH SINEWAVE.
-
太陽能
+關注
關注
37文章
3410瀏覽量
114247 -
逆變器
+關注
關注
283文章
4722瀏覽量
206832 -
面板
+關注
關注
13文章
1676瀏覽量
53867
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論