") 中科院自動(dòng)化所王飛躍教授作大會(huì)報(bào)告
中科院自動(dòng)化所王飛躍教授作大會(huì)報(bào)告
在第十八屆上海國(guó)際車展期間,同期舉行了 “2019 AI+智能汽車創(chuàng)新峰會(huì)”,中科院自動(dòng)化所王飛躍教授作大會(huì)報(bào)告,他認(rèn)為未來(lái)交通需要將有人車、遙控車、網(wǎng)聯(lián)車、無(wú)人車通過(guò)平行駕駛理論統(tǒng)一成“平行汽車”,平行汽車將實(shí)現(xiàn)車輛的運(yùn)營(yíng)、監(jiān)控及應(yīng)急管理三結(jié)合,實(shí)現(xiàn)安全高效的未來(lái)出行。
汽車與馬車的“戰(zhàn)爭(zhēng)”
1820年,蒸汽汽車在英國(guó)達(dá)到了實(shí)用化的階段,首先是作為公共汽車,然后是私人汽車。蒸汽汽車行駛時(shí)像傳說(shuō)中的火龍,噴吐著煙火粉塵,發(fā)出很大的噪音,行人和馬倍受驚擾,趕馬車的人更為反感。為解決這一矛盾,英國(guó)從1858年開(kāi)始實(shí)行最早的道路交通法規(guī)——“紅旗法”,規(guī)定蒸汽車在郊外和市內(nèi)都要限速,而且在蒸汽汽車前方幾米遠(yuǎn)的地方要有一手持紅旗的人先行。
汽車與馬車的戰(zhàn)爭(zhēng)大約持續(xù)了接近一個(gè)世紀(jì),最終憑借著新生事物強(qiáng)大的生命力,再加上幾代人堅(jiān)持不懈的努力改進(jìn),汽車終于代替馬車,成為人類在陸地上的主要交通工具。
隨著人工智能技術(shù)的進(jìn)步,無(wú)人駕駛汽車正逐漸從封閉測(cè)試場(chǎng)走向公共道路。有人駕駛的汽車與無(wú)人駕駛汽車在道路上混合行駛時(shí),是否也將出現(xiàn)相似的矛盾?
在上海國(guó)家會(huì)展中心舉行的 “2019AI+智能汽車創(chuàng)新峰會(huì)”上,中科院自動(dòng)化所王飛躍教授作了題為《平行汽車到平行駕駛:從“功能汽車”到“智能汽車”》報(bào)告,他認(rèn)為有人車和無(wú)人車同時(shí)上路是未來(lái)交通發(fā)展的過(guò)渡階段,就像馬車和汽車混合行駛一樣,至少要持續(xù)十幾年。未來(lái)以更加智能、高效、節(jié)能為核心理念設(shè)計(jì)的無(wú)人車,將會(huì)徹底把人從駕駛員位置上取代掉。
平行車:將有人車、遙控車、網(wǎng)聯(lián)車、無(wú)人車統(tǒng)一起來(lái)
目前,無(wú)人駕駛汽車上路存在諸多難題,不過(guò)這在王飛躍教授眼中都是暫時(shí)的“馬糞問(wèn)題”,新技術(shù)的產(chǎn)生將讓這些難題自動(dòng)消失。“我個(gè)人認(rèn)為從環(huán)保、資金投入等角度看,目前大力推廣無(wú)人駕駛汽車太過(guò)著急,可以率先應(yīng)用于一些特殊的場(chǎng)合,逐漸從礦山、物流(包括碼頭)、市政落地,慢慢發(fā)展到出租車、完全無(wú)人駕駛汽車。”王教授的言外之意是當(dāng)下應(yīng)該從特殊場(chǎng)景入手,結(jié)合技術(shù)的延續(xù)性,思考未來(lái)交通的頂層架構(gòu)。當(dāng)?shù)缆坊A(chǔ)設(shè)施、通信技術(shù)、車載硬件技術(shù)以及算法發(fā)展完善后,再推動(dòng)完全無(wú)人化,會(huì)少走很多彎路。所以“2050年落地也不遲。”
未來(lái)的無(wú)人駕駛汽車將用何種人工智能來(lái)引導(dǎo)?王飛躍教授借用AlphaGo 戰(zhàn)勝人類職業(yè)圍棋高手的事例解釋了未來(lái)人工智能的三個(gè)范式:
(1)平行:真實(shí)世界與虛擬世界的互動(dòng)
(2)從牛頓到莫頓:從“小規(guī)律、大定律”到“大數(shù)據(jù)、小定律”
(3)小數(shù)據(jù)導(dǎo)成大數(shù)據(jù)提煉成小智能
當(dāng)這種人工智能放到無(wú)人駕駛上就形成了虛實(shí)互動(dòng)的平行駕駛。所謂的平行駕駛就是通過(guò)人工系統(tǒng)對(duì)實(shí)際無(wú)人車和路建模,構(gòu)建軟件定義車輛及車路系統(tǒng),軟件定義的汽車(人工汽車)和物理汽車一起開(kāi),而且一部物理汽車要對(duì)應(yīng)三部軟件汽車:一部用來(lái)做描述,與物理車通過(guò)無(wú)線傳感網(wǎng)聯(lián)在一起,描述車輛的即時(shí)狀態(tài),不論開(kāi)到哪里都受監(jiān)護(hù);一部用來(lái)做預(yù)測(cè),前方道路是否發(fā)生事故,是否擁堵,預(yù)測(cè)車輛都能提前預(yù)測(cè);還有一部用來(lái)做規(guī)劃和引導(dǎo),給你提方案,怎樣路線最好,最省油,最節(jié)約時(shí)間。物理汽車和虛擬汽車同步行駛,保證在物理世界安全,在精神世界安全,在智能世界安全,實(shí)現(xiàn)300%的安全。
同時(shí)建立控制計(jì)算中心,對(duì)無(wú)人車和道路采集的真實(shí)數(shù)據(jù)及人工系統(tǒng)的虛擬數(shù)據(jù)進(jìn)行聯(lián)合優(yōu)化,保證無(wú)人駕駛更高級(jí)別的安全性,對(duì)單車進(jìn)行相應(yīng)的改造,從而降低車輛成本。平行駕駛充分利用了全球數(shù)字化及信息化資源,將云端、道路及車輛上的資源無(wú)縫銜接,充分考慮安全性、舒適性、敏捷性和智能性等指標(biāo),將物理、社會(huì)、信息空間打通,從而有效保證車輛行駛安全與最優(yōu)行車體驗(yàn),最終實(shí)現(xiàn)可靠、舒適、快速的平行駕駛。
王飛躍教授提到“從有人車、遙控車、到網(wǎng)聯(lián)車、再到無(wú)人車,這四類車可通過(guò)平行駕駛完成統(tǒng)一,形成第五種車叫做平行車。平行車未來(lái)的目標(biāo)是將物理世界的 UDC(不定性(Uncertainty),多樣性(Diversity)和復(fù)雜性(Complexity))轉(zhuǎn)化為知識(shí)世界的 AFC(具有深度知識(shí)支持的靈捷(Agility)、通過(guò)實(shí)驗(yàn)解析的聚焦(Focus)、能夠反饋互動(dòng)自適應(yīng)的收斂(Convergence))。用現(xiàn)實(shí)世界的術(shù)語(yǔ)來(lái)講,即實(shí)現(xiàn)運(yùn)營(yíng)、監(jiān)控及應(yīng)急管理三結(jié)合。其中,運(yùn)營(yíng)要實(shí)現(xiàn)兩個(gè)“E”-Effective、Efficient。”
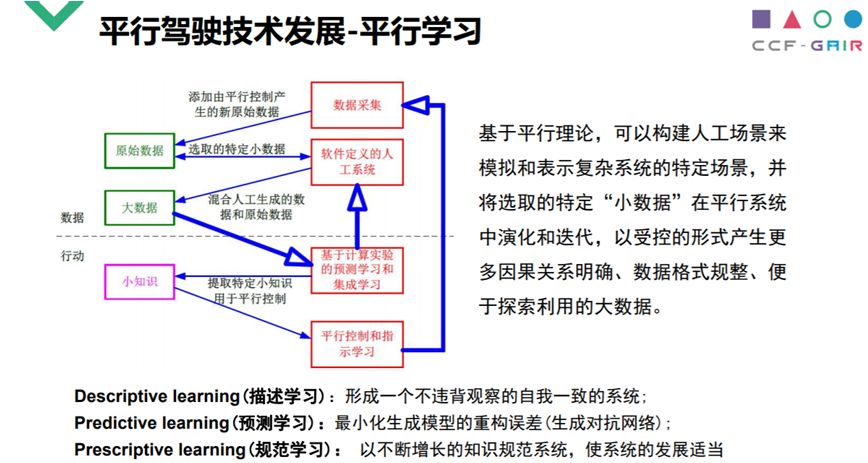
在平行理論的框架下,感知、規(guī)劃、網(wǎng)絡(luò)、轉(zhuǎn)向控制、測(cè)試都需要平行。無(wú)人車通過(guò)計(jì)算實(shí)驗(yàn)的方式把小數(shù)據(jù)導(dǎo)成大數(shù)據(jù),大數(shù)據(jù)導(dǎo)成小智能,核心就是平行學(xué)習(xí)。基于平行理論,可以構(gòu)建人工場(chǎng)景來(lái)模擬和表示復(fù)雜系統(tǒng)的特定場(chǎng)景,并將選取的特定“小數(shù)據(jù)”在平行系統(tǒng)中演化和迭代,以受控的形式產(chǎn)生更多因果關(guān)系明確、數(shù)據(jù)格式規(guī)整、便于探索利用的大數(shù)據(jù),這就是平行視覺(jué)。
同時(shí),虛實(shí)互動(dòng)的車輛智能評(píng)估與擴(kuò)展方法平行測(cè)試,可以用來(lái)測(cè)試和驗(yàn)證無(wú)人車對(duì)復(fù)雜交通場(chǎng)景的理解和行駛決策的能力, 使無(wú)人駕駛車輛進(jìn)一步提高適應(yīng)復(fù)雜環(huán)境的能力。平行測(cè)試的文章于近期發(fā)表在國(guó)際知名《科學(xué)》雜志的子刊《科學(xué)·機(jī)器人學(xué)》(Science Robotics)中。
人在回路的平行測(cè)試模型架構(gòu)
平行駕駛技術(shù)發(fā)展
談到平行駕駛技術(shù)近年來(lái)的發(fā)展,就必須要提到一家中科院系的慧拓智能機(jī)器有限公司,該公司以ACP平行理論為基礎(chǔ),致力于新一代云端化智能網(wǎng)聯(lián)自動(dòng)駕駛技術(shù)的研發(fā)及產(chǎn)業(yè)化。去年3月18日,慧拓在中國(guó)智能車綜合技術(shù)研發(fā)與測(cè)試中心(常熟)發(fā)布其 “第三代平行駕駛系統(tǒng)”,公開(kāi)演示了“駕駛員”如何利用平行駕駛管控中心的遙控駕駛系統(tǒng)中遠(yuǎn)程管理并控制在真實(shí)道路上行使的多輛無(wú)人駕駛車。去年6月30日,在IEEE IV 2018 On-Road Demonstration 國(guó)際智能車聯(lián)合道路演示上,展示了平行駕駛3.1版,現(xiàn)場(chǎng)演示了一般交通場(chǎng)景響應(yīng)式接管、緊急交通場(chǎng)景主動(dòng)接管、主動(dòng)避障、中心駕駛員實(shí)時(shí)狀態(tài)檢測(cè)四個(gè)部分。圍繞“平行駕駛”框架的平行駕駛3.1系統(tǒng),通過(guò)平行駕駛管控平臺(tái)流暢的管理多臺(tái)無(wú)人車,讓無(wú)人車更安全平穩(wěn)的在道路上行駛,這無(wú)疑是自動(dòng)駕駛技術(shù)的落地提供了一種安全、可靠、高效的實(shí)施方案,實(shí)現(xiàn)道路上混合車輛系統(tǒng)(有人駕駛、自動(dòng)駕駛、無(wú)人駕駛)的安全平穩(wěn)智能管理,同期也成立了一個(gè)國(guó)際平行駕駛聯(lián)盟(iPDA),由18所學(xué)校參加進(jìn)來(lái)共享數(shù)據(jù)。
另外,慧拓與吉利合作的平行駕駛,與徐工合作的平行礦山,與一汽合作的平行物流等項(xiàng)目都在進(jìn)行中。王教授最后提到,“目前平行駕駛中虛擬測(cè)試已經(jīng)占到了99%,但是仍然是不夠的,最終要將物理車測(cè)試降到萬(wàn)分之一甚至更小。把過(guò)去在物理世界吃一"塹",虛擬世界長(zhǎng)一"智",變成在虛擬世界吃多"塹",物理世界長(zhǎng)多"智"。”
-
AI
+關(guān)注
關(guān)注
87文章
31132瀏覽量
269448 -
智能汽車
+關(guān)注
關(guān)注
30文章
2869瀏覽量
107363
原文標(biāo)題:平行汽車到平行駕駛:從“功能汽車”到“智能汽車”
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
通用自動(dòng)化測(cè)試軟件 - TAE
華大九天亮相第61屆設(shè)計(jì)自動(dòng)化大會(huì)
開(kāi)啟全新AI時(shí)代 智能嵌入式系統(tǒng)快速發(fā)展——“第六屆國(guó)產(chǎn)嵌入式操作系統(tǒng)技術(shù)與產(chǎn)業(yè)發(fā)展論壇”圓滿結(jié)束
機(jī)械自動(dòng)化和電氣自動(dòng)化區(qū)別是什么
機(jī)械自動(dòng)化是自動(dòng)化的一種嗎
機(jī)械制造與自動(dòng)化是自動(dòng)化類嗎
工業(yè)自動(dòng)化和自動(dòng)化區(qū)別是什么
淺談對(duì)化工廠內(nèi)35kV及以下變電所的綜合自動(dòng)化
羅克韋爾自動(dòng)化亞太區(qū)PartnerNetwork合作伙伴大會(huì)圓滿落幕
自動(dòng)化智能運(yùn)維系統(tǒng)在高鐵牽引變電所的研究與應(yīng)用
變電所自動(dòng)化控制系統(tǒng)應(yīng)用與分析
浙江圖靈算力研究院向知存科技頒發(fā)“年度最具影響力企業(yè)獎(jiǎng)”
湖南大學(xué)校長(zhǎng)、王耀南院士一行赴中科億海微調(diào)研指導(dǎo)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論