") 機(jī)器人3D視覺引導(dǎo)系統(tǒng)的詳細(xì)資料概述
機(jī)器人3D視覺引導(dǎo)系統(tǒng)的詳細(xì)資料概述
基于結(jié)構(gòu)光測(cè)量技術(shù)和3D物體識(shí)別技術(shù)開發(fā)的機(jī)器人3D視覺引導(dǎo)系統(tǒng),可對(duì)較大測(cè)量深度范圍內(nèi)散亂堆放的零件進(jìn)行全自由的定位和拾取。相比傳統(tǒng)的2D視覺定位方式只能對(duì)固定深度零件進(jìn)行識(shí)別且只能獲取零件的部分自由度的位置信息,具有更高的應(yīng)用柔性和更大的檢測(cè)范圍。可為機(jī)床上下料、零件分揀、碼垛堆疊等工業(yè)問題提供有效的自動(dòng)化解決方案。
機(jī)器視覺3D引導(dǎo)系統(tǒng)框架
3D重建和識(shí)別技術(shù)
通過自主開發(fā)的3D掃描儀可獲準(zhǔn)確并且快速地獲取場(chǎng)景的點(diǎn)云圖像,通過3D識(shí)別算法,可實(shí)現(xiàn)在對(duì)點(diǎn)云圖中的多種目標(biāo)物體進(jìn)行識(shí)別和位姿估計(jì)。
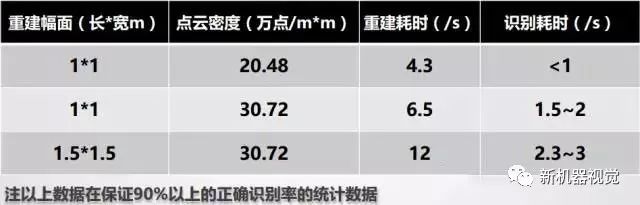
3D重建和識(shí)別效率
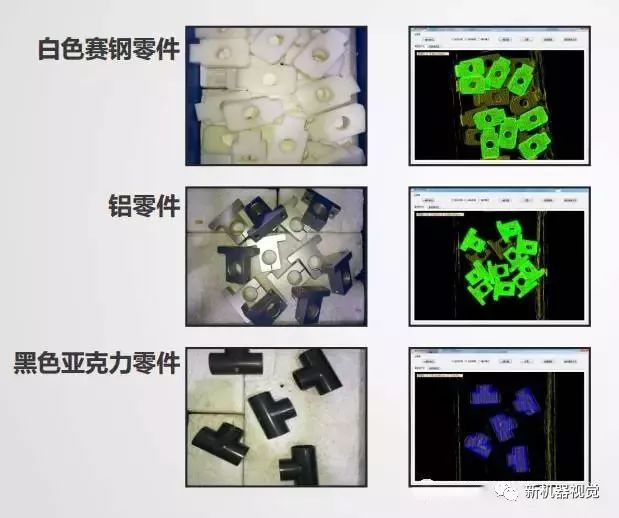
多種材質(zhì)識(shí)別效果測(cè)試
得益于健壯的重建算法和識(shí)別算法,可對(duì)不同材質(zhì)的零件進(jìn)行穩(wěn)定的重建和識(shí)別,即便是反光比較嚴(yán)重的鋁材料及黑色零件都能獲得較好的重建和識(shí)別效果,可適用于廣泛的工業(yè)場(chǎng)景。
機(jī)器人路徑規(guī)劃
并不是獲得零件的位姿信息后就能馬上進(jìn)行零件的拾取,這僅僅只是第一步,要成功拾取零件還需要完成以下幾件事:
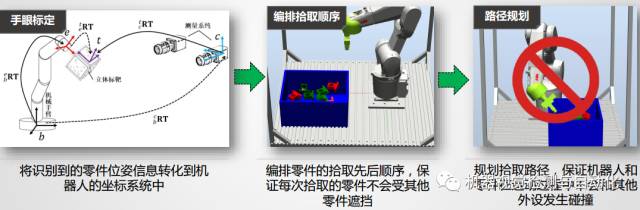
自主開發(fā)的機(jī)器人軌跡規(guī)劃算法,可輕松完成上述工作,保證機(jī)器人拾取零件過程穩(wěn)定可靠。
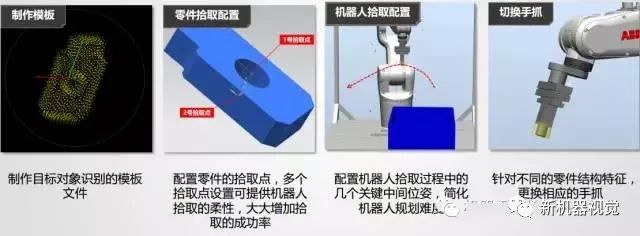
快速切換拾取對(duì)象
只需要四個(gè)簡(jiǎn)單的操作即可實(shí)現(xiàn)拾取對(duì)象的快速切換,無需進(jìn)行復(fù)雜的工裝、產(chǎn)線的調(diào)整。
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28418瀏覽量
207095 -
機(jī)器視覺
+關(guān)注
關(guān)注
162文章
4372瀏覽量
120316 -
3D視覺
+關(guān)注
關(guān)注
4文章
433瀏覽量
27526
原文標(biāo)題:基于結(jié)構(gòu)光測(cè)量技術(shù)和3D物體識(shí)別技術(shù)開發(fā)的機(jī)器人3D視覺引導(dǎo)系統(tǒng)
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于3D視覺技術(shù)的機(jī)器人系統(tǒng)
哪位大神有ASIMO機(jī)器人的詳細(xì)資料啊?
服務(wù)機(jī)器人的視覺系統(tǒng)怎么設(shè)計(jì)?
未來的機(jī)器人3D視覺系統(tǒng)將會(huì)發(fā)生什么樣的變化?
四元數(shù)數(shù)控:深圳機(jī)器視覺引導(dǎo)定位是什么?
機(jī)器人設(shè)計(jì)教程之機(jī)器人傳感子系統(tǒng)的詳細(xì)資料概述
工業(yè)機(jī)器人導(dǎo)軌的3D模具圖詳細(xì)資料免費(fèi)下載
工業(yè)機(jī)器人的視覺系統(tǒng)詳細(xì)資料概述

雙足機(jī)器人STL 3D模型詳細(xì)資料合集免費(fèi)下載

抓取作業(yè)機(jī)器人3D視覺系統(tǒng)的設(shè)計(jì)
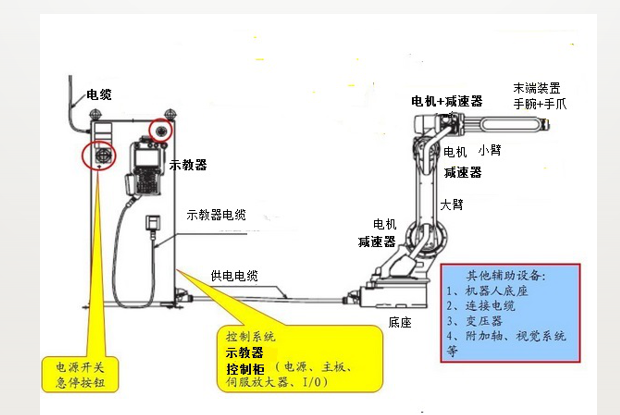
工業(yè)機(jī)器人的詳細(xì)資料和應(yīng)用編程等培訓(xùn)資料概述
剖析3D視覺引導(dǎo)的拆裝模機(jī)器人系統(tǒng)設(shè)計(jì)
富唯智能案例|3D視覺引導(dǎo)機(jī)器人抓取鞋墊上下料






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論