 工業相機如何如何消除表面的干擾實現穩定檢測
工業相機如何如何消除表面的干擾實現穩定檢測
如何消除表面的干擾,實現穩定檢測?
通過不同方向照明進行多張圖像分析
融合相機、照明和檢測算法的穩定檢測新方案
使用新開發的超高速相機和超高速部分亮燈照明,對對象工件進行拍攝。這是一種全新的拍攝方法,它將對多個方向亮燈的數張 圖像進行分析,并生成形狀(凹凸)圖像和紋理(圖樣)圖像。由于可排除周圍環境的影響及檢測時工件偏差帶來的不穩定因素,因此,以往需花費大量時間、具備豐富經驗才能完成的圖像,現在任何人都能輕松獲得。
檢測金屬鑄件表面的缺陷
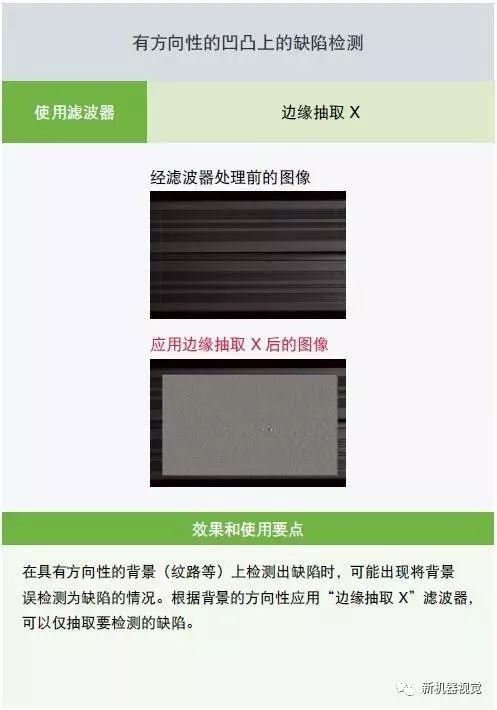
忽略清洗液殘留、污點、細微紋路等因素,僅檢測凹痕和缺口等嚴重缺陷。
檢測薄膜上的刻印
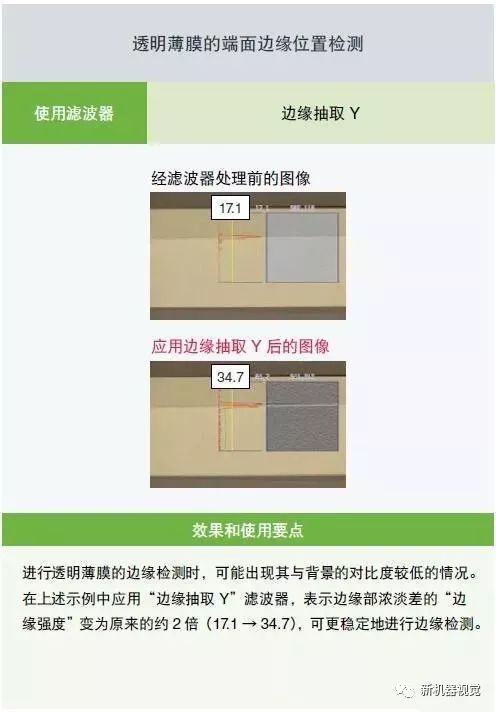
去除對檢測造成不良影響的光暈,以實現穩定檢測。
檢測金屬鑄件表面的刻印
從隨機的鑄件表面中,突顯具更大凹凸信息的刻印部分。
檢測印刷上的缺陷
不受背景復雜印刷的影響,生成僅抽取缺陷的圖像。
檢測熱封口寬度
通過顏色和濃淡狀態,捕捉不易發生變化的密封部凹凸信息,并進行抽取。
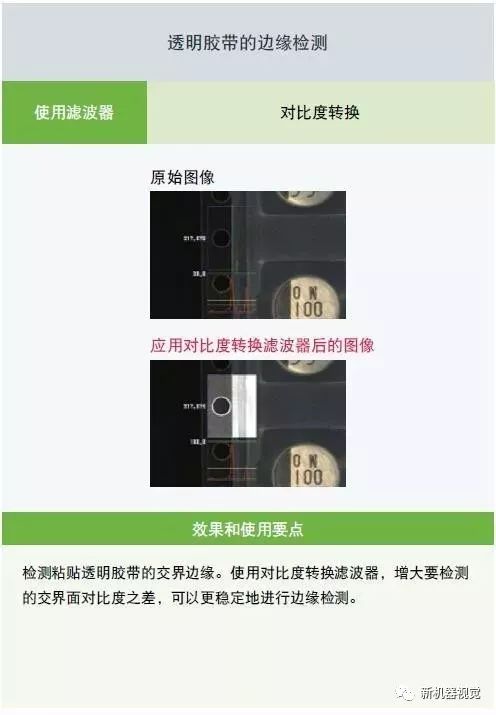
檢測有無密封膠帶
即使受工件傾斜的影響突然出現正反射現象,也可消除光暈,實現穩定檢測。
解決獲取穩定圖像的課題
以往的圖像獲取課題
使用【LumiTrax ?】系統均可解決
【LumiTraxTM】 原理
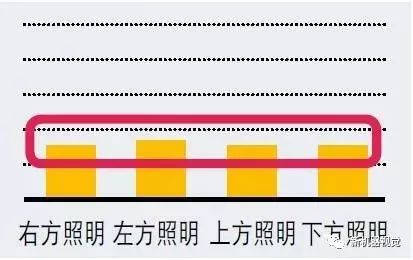
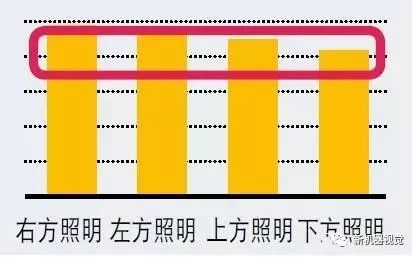
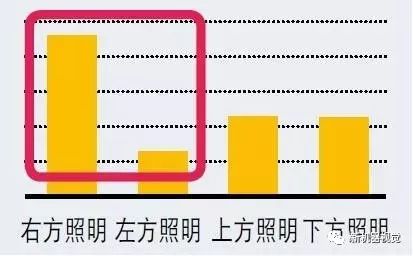
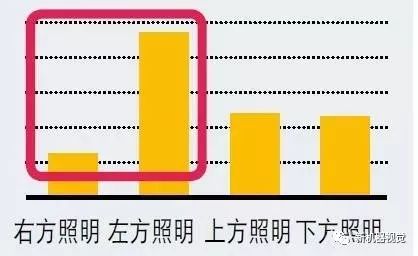
1、超高速執行來自不同方向的照明亮燈&拍攝
上方照明圖像:
右方照明圖像:
左方照明圖像:
下方照明圖像:
2、分析各像素的亮度值變化情況,并在分離“形狀(凹凸)”、“紋理(圖樣)”后,進行圖像化處理
紋理圖像:
形狀圖像:
像素A的亮度值:
像素B的亮度值:
像素C的亮度值:
像素D的亮度值:
如何避免明暗變化帶來的影響,僅檢測出異物?
可應對變化的2 種外觀檢測
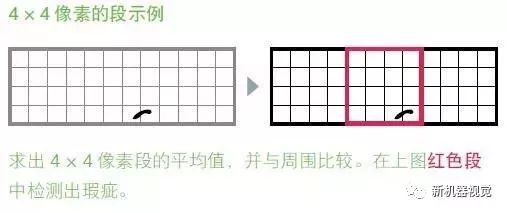
瑕疵
檢測穩定性“一目了然”的業界標準外觀檢測工具
該工具可在與周圍濃淡等級進行比較的同時檢測瑕疵和污點等缺陷。不僅具備卓越的檢測能力,還可僅篩選出大小、濃度、形狀、個數等要檢測的缺陷。
膠囊的污點檢測
【瑕疵模式】原理
視覺系統使用感光元件CCD 每個像素的濃度(亮度)數據,將濃度的變化檢測為瑕疵/ 邊緣。但是,以1 像素為單位全部進行處理,需要花費大量的處理時間,且對檢測無用的干擾數據還會影響結果。在此,視覺系統使用多個像素的小單位平均值進行處理。瑕疵模式中使用“段”這一小單位與周圍平均濃度進行比較,檢測出瑕疵。
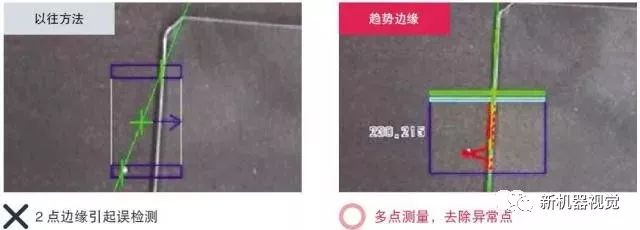
趨勢邊緣缺陷
最適合毛刺/ 缺陷檢測的輪廓缺陷檢測工具
該工具可從工件邊緣抽取輪廓,將與該輪廓線差別較大的部分識別為毛刺/ 缺陷。以最多5000 點的邊緣信息為基準,不僅支持圓或直線檢測,還支持由橢圓或自由曲線構成的復雜形狀輪廓的檢測。
塑料瓶凹陷檢測
通過多點信息,準確檢測出細微凹陷
【趨勢邊緣缺陷】原理
電容器的毛刺檢測
1、沿著工件形狀,最多可檢測出5000 點邊
緣。(線上的圓點為邊緣檢測點)
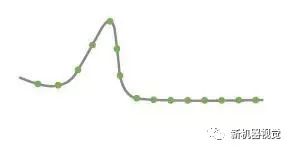
2、在1測量的邊緣點中推定并檢測出作為工件輪廓的基準模型線
3、將距基準模型線一定距離的邊緣點檢測為不良(毛刺/ 缺陷)
在亮度變化較大的地方,如何實現穩定檢測?
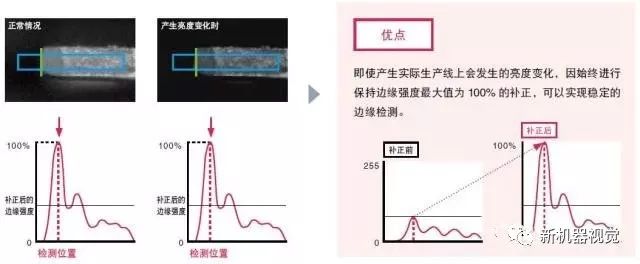
邊緣強度100% 補正
邊緣模式
該位置檢測工具可通過“邊緣強度波形”確認檢測穩定性
設定時,可一邊觀看邊緣強度波形一邊調整邊緣檢測等級。另外,在實際生產線中,為穩定邊緣將始終進行補正,保持微分絕對值最大為100%,這樣即使產生亮度變化,內部也將以相同條件進行檢測。
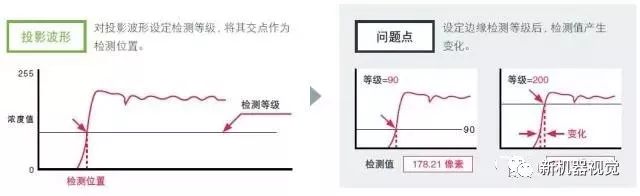
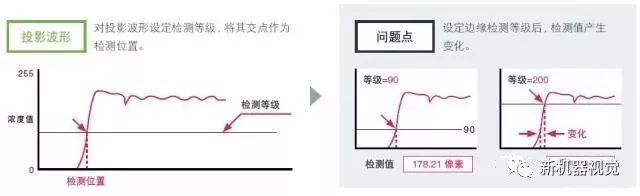
【邊緣】原理
檢測方法1
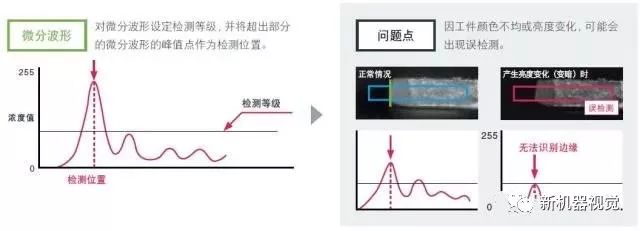
對投影處理后的波形設定檢測等級的方法
檢測方法2
對微分波形設定檢測等級的方法(不進行100% 補正時)
檢測方法3
保持邊緣強度最大值為100% 的補正方法
檢測邊緣時需要求出微分波形,為了保持實際生產線中檢測穩定,始終進行保持微分值最大值為100%的補正。對于補正后的波形將“邊緣敏感度(%)”設置為邊緣檢測閾值,因此即使絕對亮度產生變化,也可保持內部以相同條件進行檢測,邊緣檢測穩定。
邊緣位置不穩定產生誤抓取時怎么辦?
最多5000 點的邊緣檢測
趨勢邊緣模式
趨勢邊緣位置、寬度、缺陷的3 種模式
通過多條檢測出的邊緣位置信息可以求出虛擬直線或虛擬圓,用于位置檢測、角度檢測等。可消除異常的位置數據,進行穩定檢測。
直線檢測
圓檢測
利用趨勢邊緣的3 種檢測模式
趨勢邊緣位置
通孔中心檢測
可通過各檢測點判定,求出虛擬直線或虛擬圓用于運算。
趨勢邊緣寬度
電容器的尺寸測量
執行2 種趨勢邊緣處理,求出段之間的寬度。還可以檢測直徑等。
趨勢邊緣缺陷
瓶蓋的毛刺檢測
以檢測點為基礎求出基準線,并將與基準線的距離檢測為缺陷。也可用于毛刺/ 缺陷檢測。
趨勢邊緣寬度
趨勢邊緣位置(寬度)模式可對檢測區域內寬度較窄的邊緣窗口進行掃描,同時檢測出各點邊緣位置。通過使用該檢測模式,可在1個窗口中檢測出多點邊緣寬度,不放過目標工件的任何細微變化。
通過趨勢邊緣寬度進行最大外部尺寸檢測
通過趨勢邊緣寬度進行最小內部尺寸檢測
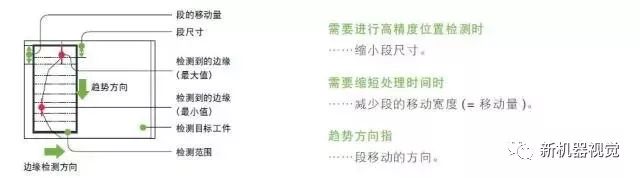
【趨勢邊緣】原理
使寬度較窄的區域段以較細的移動寬度(移動量)向趨勢方向移動,檢測各點的邊緣寬度或邊緣位置,并檢測出最大值/ 最小值。另外,運算中可以使用全部點的檢測值。
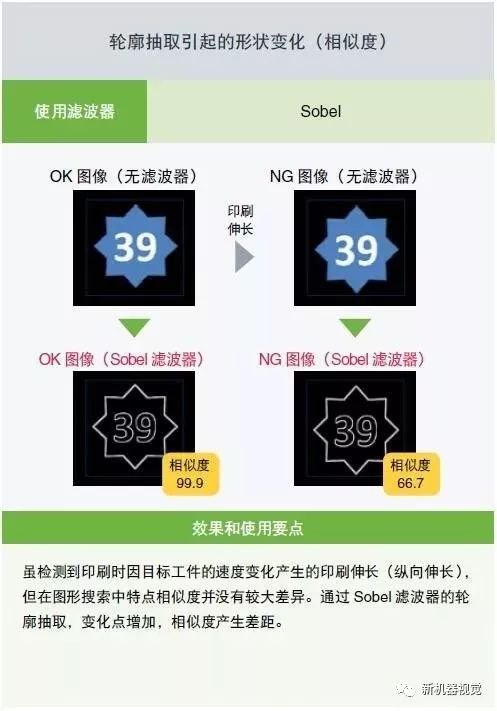
如何在圖像不穩定的情況下進行準確的形狀搜索?
如何在圖像不穩定的情況下進行準確的形狀搜索?
ShapeTrax
在惡劣條件下,追求處理能力、高速、高精度的搜索工具
該工具可使用從對象抽取的輪廓形狀信息進行搜索。即使搜索對象產生缺陷或對比度降低、大小變化等,也可穩定搜索。作為其他工具的位置偏移補正源,也可發揮卓越的搜索能力。
ShapeTrax 特點
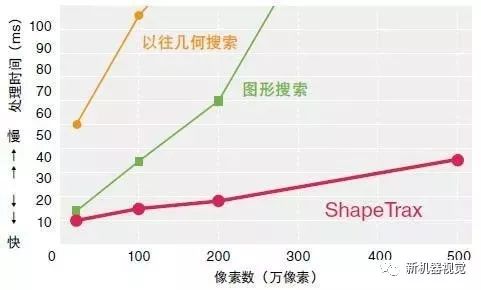
超高速處理
通過改善處理算法,實現比以往快10 倍的大幅度高速化。此外,即使是500 萬像素等大容量圖像,也可稍微增加處理速度,實現較高速的處理。
CCD 像素數和搜索處理時間(角度范圍±180 度)
CV-X100 系列的評估數據
超高精度
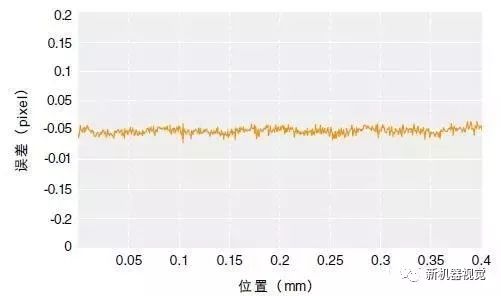
直線性和重復精度皆已實現0.025 像素的業界超高等級。滿足因對象的細微化和高精度化而提升搜索精度的需求。
直線性數據(代表例)
結合圖像的預處理功能,實現更穩定的檢測
支持對比度低的工件(使用預處理功能)
ShapeTrax 的特點之一為支持對比度低的工件,加上利用CV-X/XG 系列獨有的預處理功能“實時濃淡補正”,即可檢測出如下圖片所示的2 種定位標記(大圓圈和小圓形)。重點在于通過預處理去除周期性陰影,和ShapeTrax 針對對比度低工件的檢測能力。
【ShapeTrax】原理
輪廓形狀搜索的重點在于如何抽取工件的輪廓信息實現高精度搜索,以及使用大量輪廓信息時如何實現高速處理。
ShapeTrax 為了解決以上問題,執行多級處理。
1、粗劣搜索
根據設定確定壓縮率,從壓縮的圖像中得出輪廓圖形,并在壓縮圖像內進行搜索,先檢測出大致位置。因信息量較少,可以實現高速搜索。
2、精細搜索
鎖定在粗略搜索中檢測的位置周邊,再得出無壓縮的輪廓圖形進行搜索。使用不壓縮的全部像素信息,可實現高精度搜索。由此,通過粗略搜索鎖定大致位置,并通過精細搜索檢測出最終位置,使得hapeTrax 實現了高速性和高精度的并存。
通過有無/ 辨別或個數計算保持檢測穩定的訣竅是?
根據對象選擇檢測項目
面積模式
進行面積檢測的簡單檢測工具
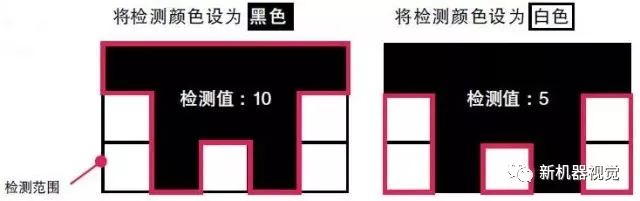
面積檢測方法又稱面積二值化處理,通過統計黑白二種像素數,檢測是否有應檢測出的部分。
貼片電容有無檢測
檢測壓紋帶內有無貼片電容。對檢測區域進行黑白二值化處理,對計算出的面積設定公差。
方便面調料包有無檢測
檢測方便面有無料包和湯包。使用1 臺控制器即可控制多列檢測,提高了運行效率。
密封膠帶的有無/ 破損檢測
檢測密封膠帶的有無/ 破損。可對檢測范圍內的膠帶面積設定公差,進行檢測。
效能說明書的有無檢測
檢測方便面有無料包和湯包。使用1 臺控制器即可控制多列檢測,提高了運行效率。
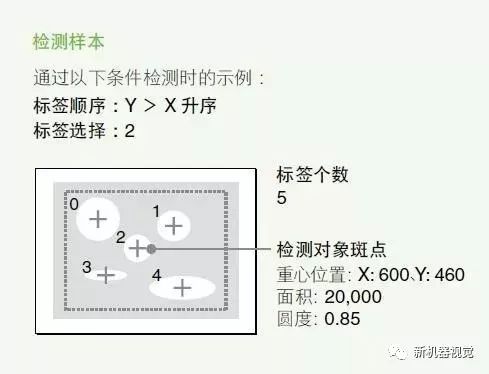
斑點模式
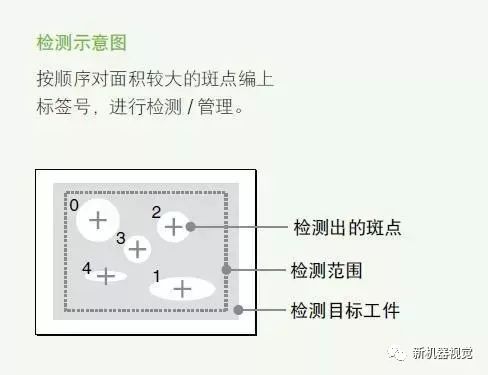
面積、周長、圓度、個數、重心位置等綜合檢測工具
斑點(blob)有“小塊”的意思,在有無檢測中指濃度相同的像素的集合體。根據集合體面積(像素數)等算出“斑點的特征量”,可檢測要檢測部分的有無。
藥片個數計算
計算藥片的個數。通過斑點處理計算區域內的藥片個數,并對計算出的個數設定公差。
飲料瓶數量計算
使用500 萬像素相機,即使在寬廣視野下也能進行高精度檢測。除計算個數之外,僅用1 臺相機即可檢測字符或顏色的細微區別,分辨瓶蓋是否為同一品種等。
SD 卡數量計算
計算托盤內的SD 卡數量。使用高像素相機,還可以同時檢測容量記錄的不同等。
檢測軸承內是否有潤滑脂
檢測軸承內是否有潤滑脂。只要使用圖像處理模式之一的“斑點”或“面積”,即可進行穩定檢測。
如何在字符檢測中即使刻印狀態發生變化,也可穩定檢測?
處理字符大小、位置、刻印品質、亮度變化
OCR(字符識別)
放心、準確的識別字符工具,將切割狀態和穩定度可視化
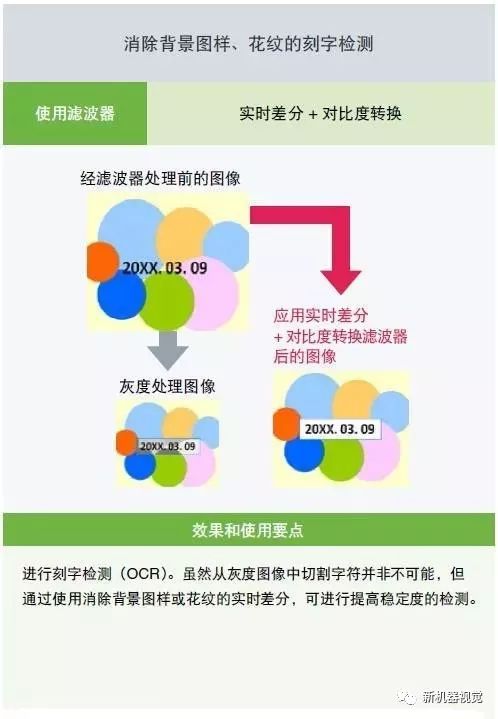
本工具可識別產品上印刷、刻印的字符。為了應對作業現場時刻變化的刻印狀態,基恩士致力于將字符切割、穩定度、字庫等識別字符的重要因素可視化。
通過不使用二值化的灰度處理,即使周圍亮度發生變化,也可穩定檢測。此外,采用字符切割方式,可輕松掌握識別狀態。
代表性用途示例
保質期印字檢測
對食品容器上保質期的正誤進行字符核對(OCV)
型號的字符識別
通過視覺系統對電子部件上的型號進行字符識別(OCR)。
【OCR(字符識別)】原理
視覺系統的字符識別可以逐一識別相機拍攝到的目標物上的字符,然后與內部預先注冊的字庫(字符字體群組)比對,形狀最為一致的則識別為相應的字符。此外,通過將正確的字符串作為判定公差進行注冊,對是否與已識別的字符串完全一致作出判定,然后輸出OK/NG 的判定結果。另外,還可以將讀取的字符串作為字符數據輸出至外部設備。
自動字符切割設定
1、最大支持20 個字符/ 行,2 行/ 范圍
2、根據獨特的投影波形獲取字符串的位置,自動調整切割范圍
3、直接從灰度圖像中切割,無需二值化處理,不易受亮度變化的影響
切割檢測范圍內字符的同時檢測以下內容。與字庫圖形核對并進行補正,提高識別度。
1、行的角度旋轉傾斜
2、字符高度偏差
3、字符間隔偏差
4、字符大小偏差

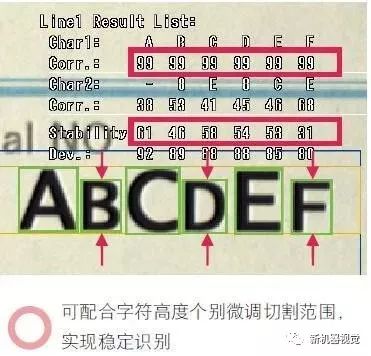
貼合切割功能
對于一同切割出的字符,會將每個字符微調至最佳的切割狀態。
通過個別補正每個字符產生的細微變化并進行對照,以提高識別度。
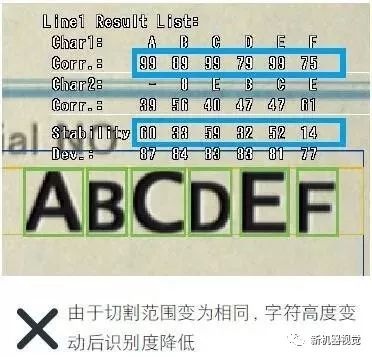
貼合切割ON(標準規格)
貼合切割OFF
字符識別

如何檢測出細微的表面顏色差異?
利用顏色信息穩定檢測
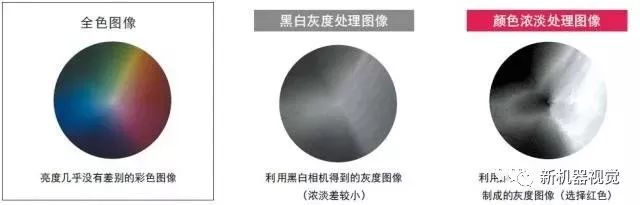
顏色濃淡處理
生成處理了色相、飽和度、亮度全部信息的灰度圖像
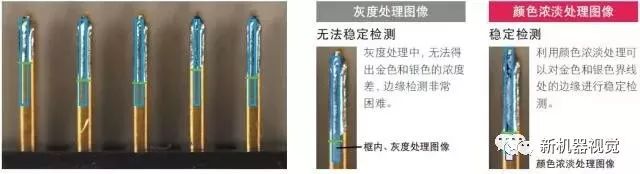
在顏色濃淡處理中,可將以往黑白相機無法分辨的圖像轉換為高對比度的灰度圖像,實現穩定的圖像處理檢測。
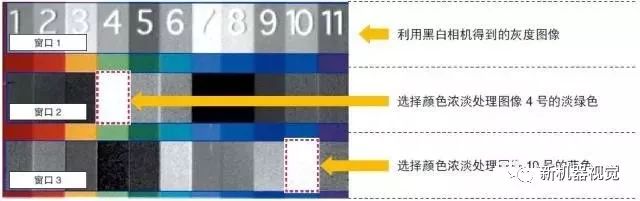
在窗口1 的灰度圖像中,各顏色的對比度不明顯,檢測不穩定。窗口2、3 中,通過顏色濃淡處理,可以僅準確抽取特定顏色。即使是對比度較低的對象,也可轉換為具有明顯濃淡差的圖像。
實際檢測示例
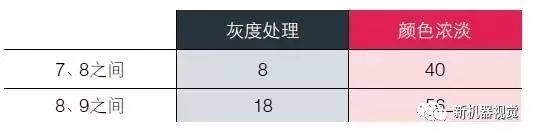
使用邊緣檢測功能檢測8 號的寬度如左邊2 幅圖像所示。左邊為灰度處理,右邊為顏色濃淡。在顏色濃淡中得到8 和7、9 的對比度,在灰度處理中7 和8 幾乎沒有對比度,邊緣檢測也不穩定。表示邊緣邊界部變化強弱的邊緣強度如下表所示,顏色濃淡處理一方較高。
顏色濃淡處理應用示例
鍍金連接器的焊接位置檢測
【顏色濃淡處理】原理
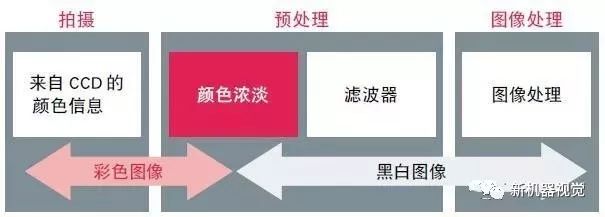
這種預處理方式可以將數據量大的彩色圖像轉換成以指定顏色為最高階調亮度的256 階調灰度圖像。除亮度之外,還使用了顏色信息,支持進行金色和銀色的辨別、淺色辨別等黑白相機難以檢測的情況。
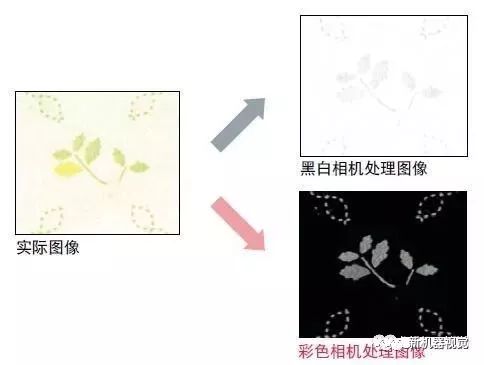
在檢測左圖所示的淺色圖案時,如使用黑白濃淡處理,則只能得到非常淡的圖像。但是采用基于顏色信息的顏色濃淡處理后,可以看到,背景成為黑色,淡色部位可以清晰地轉換為灰色的圖案。
在進行標記形狀差異或位置偏移檢查時,兩種處理在效果上的差異一目了然。
新機器視覺:www.vision263.com
如何消除微小干擾,強調微小變化?
預處理功能(基礎篇)
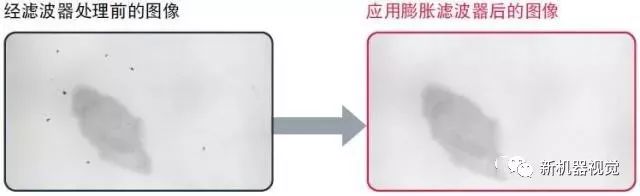
膨脹濾波器
消除背景中黑色干擾成分的預處理功能
不單個使用,而是以相同次數多次應用膨脹→收縮,在維持原有形狀的基礎上消除干擾。
【膨脹濾波器】原理
膨脹濾波器的算法
在包含以3 × 3 中心像素濃度為中心的9 個像素中,替換為最大濃度的處理。有去除黑色干擾成分的效果。

收縮濾波器的算法
在包含以3 × 3 中心像素濃度為中心的9 個像素中,替換為最小濃度的處理。具有強調黑色像素、穩定檢測出黑點等瑕疵的效果。

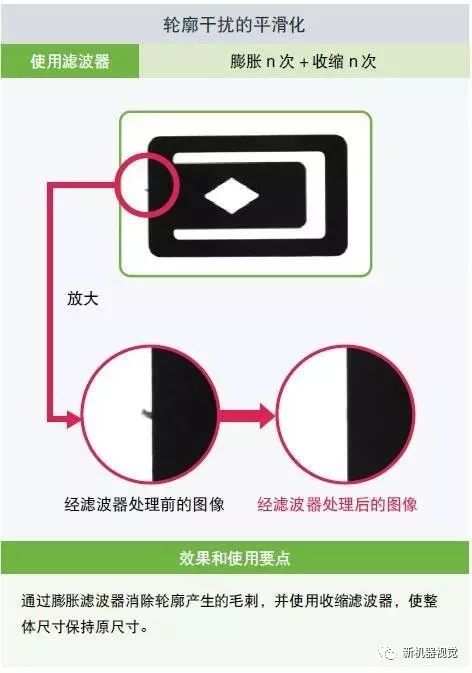
重點:
不單個使用,通過相同次數的膨脹→收縮動作,在維持原有形狀的基礎上,只去除黑色的毛邊形狀。
各種預處理功能
如何不受背景影響進行檢測?
預處理功能(應用篇)
實時濃淡補正
消除漸變的濃淡變化,可以僅抽取缺陷的預處理功能
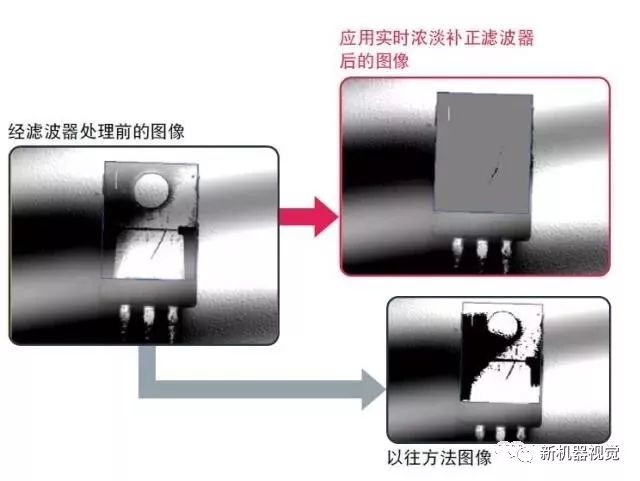
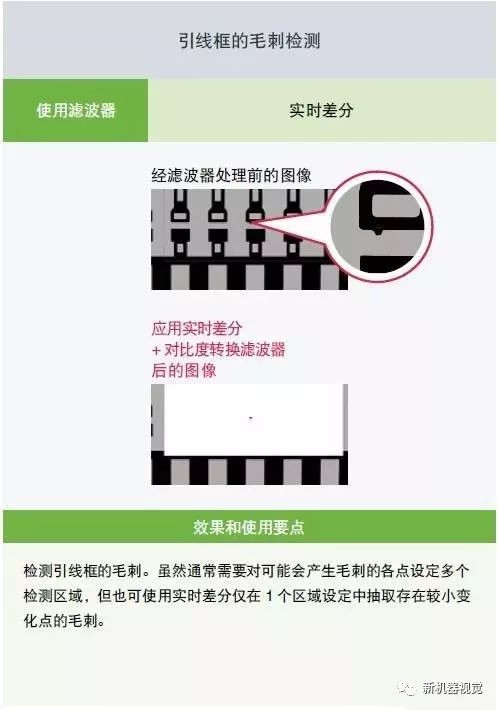
取消工件表面產生的陰影或不均勻光量,補正為最適合檢測的圖像。即使每次濃淡狀況均發生變化,仍可實時執行補正,并僅抽取缺陷部。
【實時濃淡補正濾波器】原理
1、制作推定背景圖像
根據參數抽取低于指定抽取尺寸的缺陷,推定最佳背景圖像。
2、從輸入圖像中減去推定背景圖像
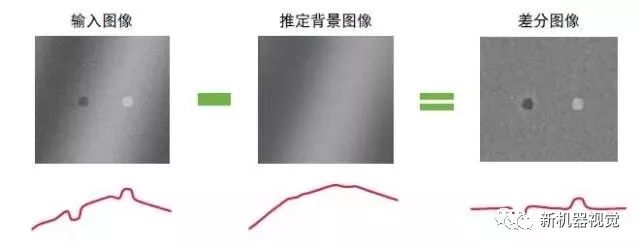
3、調整圖像至最佳狀態
圖像的最佳調整可通過選擇明缺陷、暗缺陷的對象缺陷顏色,或提升增益/ 去除干擾,將差分圖像調整到更適合于檢測的圖像。
各種預處理功能
新機器視覺:www.vision263.com
如何使任何人都可以迅速對焦或調節亮度?
實現“在任何時候,任何地方都相同”
拍攝環境再現導航
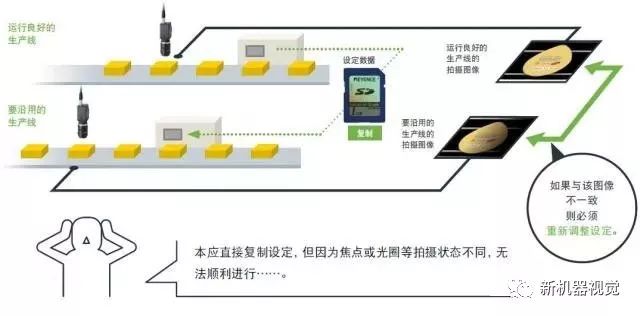
使位置、亮度、焦點返回導入初始狀態的實用功能
在沿用生產線時的初期調整、相機移動后進行重新調整等情況下,可無需變更檢測程序,任何人都可準確且迅速地進行調整。
通過拍攝環境再現導航一舉解決!
可在如下情況中使用。
● 橫向沿用生產線時
● 向國外出口裝置并在當地組裝使用時
● 運行中頻繁出現誤判定時
● 操作錯誤導致相機位置或焦點移動時
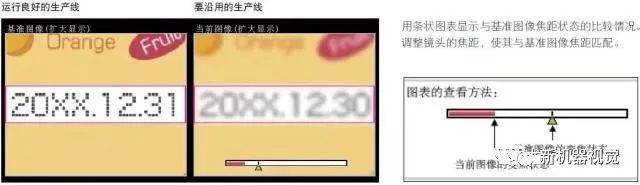
拍攝環境再現導航
可再現運行良好的相鄰生產線
可將輸入圖像的拍攝狀態與基準圖像的拍攝狀態匹配。
● 在沿用到新的生產線時,與運行良好的生產線的基準圖像匹配
● 與設定時的基準圖像進行比較,確認“是否與以往的狀態相同”。可靈活應用于上述場合。
位置調整
亮度調整
焦點調整
-
算法
+關注
關注
23文章
4629瀏覽量
93258 -
機器視覺
+關注
關注
162文章
4405瀏覽量
120626 -
工業相機
+關注
關注
5文章
327瀏覽量
23736
原文標題:【干貨】機器視覺系統工程經驗處理技巧
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論