 經過足夠的訓練,AI導航能否實現高精度定位導航?
經過足夠的訓練,AI導航能否實現高精度定位導航?
DeepMind的科學家們進行了相關研究,并在Arxiv.org上發表了一篇論文。
論文鏈接:
https://arxiv.org/pdf/1906.05930.pdf
論文中,他們使用自上而下的視覺信息將地面視圖語料庫訓練的人工智能策略應用到城市目標區域,并認為這種方法很值得推廣。
論文的共同作者說,他們的靈感源自一個發現,即人類可以通過看地圖來快速適應一個新城市。
作者在論文里寫道,在陌生的環境里,通過視覺觀察進行導航是AI導航的核心,這也是一項持續存在的挑戰。到目前為止,目標驅動的AI導航還不能在沒有大量訓練的情況下進行高精度導航,但是單純依靠模擬訓練并不是一種有前景的解決方法。他們的核心理念是將地面視圖與航空視圖匹配,學習跨視圖轉換的聯合策略。
研究人員首先收集區域航空視圖,根據相應的地理坐標與街道視圖進行匹配。接下來,他們著手進行一個轉移學習任務,該任務通過觀測航空視圖目標區域獲得數據并進行適應性訓練,最后使用地面視圖觀察轉移到目標區域。
研究團隊的機器學習系統包括三個模塊,負責視覺感知的卷積模塊,捕獲特定位置特征的長短期記憶網絡(LSTM)模塊,以及產生動作分布的策略循環神經模塊, 它現已被應用于StreetAir。StreetAir是一個來自谷歌街景和谷歌地圖的交互式第一視角全景街景照片集,它的技術基礎建立在StreetLearn之上。在StreetAir和StreetLearn中,人們可以看到紐約市中心的航拍圖像,同樣的,系統根據緯度和經度坐標,返回了一個匹茲堡的阿勒格尼河和卡內基梅隆大學校園的84 x 84航拍圖像,與位于該位置的地面視圖圖像大小相同。
一旦人工智能系統經過訓練,其任務是學習本地化并在給定目的地緯度和經度坐標的情況下展示街道全景圖。覆蓋兩側2-5公里區域的全景圖間隔約10米,AI導航每次可進行以下五種動作中的一種:向前移動,向左轉22.5度,向右轉22.5度,向左轉67.5度,向右轉67.5度。若順利導航至目的地100-200米范圍內,AI將獲得獎勵。
在實驗中,利用航空圖像來適應陌生環境的AI獲得的獎勵明顯高于僅使用地面圖像數據的AI。研究人員認為,這表明他們的方法顯著提高了AI獲取目標城市道路信息的能力。
研究團隊表示,與單視圖(地面視圖)相比,他們的方法將更好地將AI導航應用于未知街道,具有更高的零樣本學習回報(不需要在地面視圖上進行訓練即可轉移)和更好的整體表現(在轉移期間仍能進行連續訓練)。
-
AI
+關注
關注
87文章
30896瀏覽量
269108 -
導航
+關注
關注
7文章
528瀏覽量
42414
原文標題:用航拍和地面觀測數據,DeepMind AI可完成在陌生區域導航
文章出處:【微信號:BigDataDigest,微信公眾號:大數據文摘】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
高精度GNSS+INS組合導航:速度、位置、姿態全掌握

光庭信息助力高精度導航定位關鍵技術突破
AGV激光導航定位技術綜述與發展趨勢

移遠通信推出全星系多頻段高精度定位定向GNSS模組LG580P,引領高精度導航新時代

物聯網系統中高精度RTK定位方案的實現_高精度定位模塊

基于ST第五代高精度定位芯片的車載定位P-BOX方案

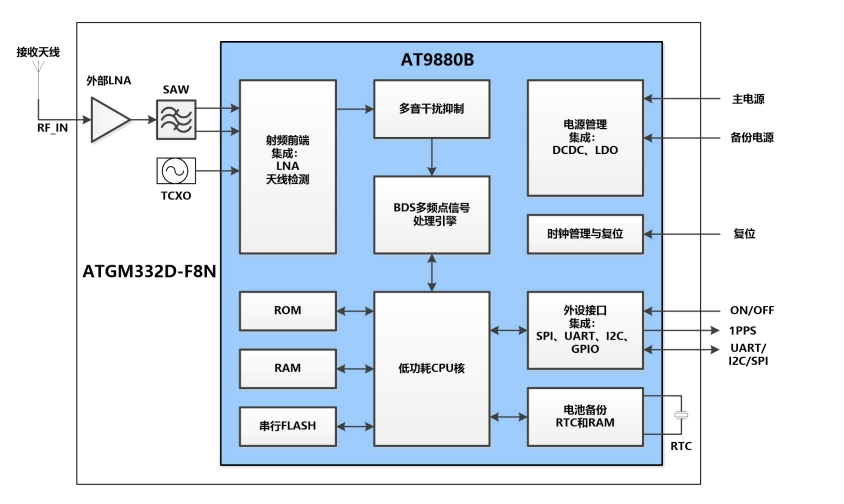
ATGM332D-F8N低功耗單北斗多頻定位導航模塊資料
北斗RTK高精度定位系統介紹
室外定位:高精度北斗RTK定位技術
隧道定位導航的解決方案
北斗高精度定位手持終端在哪些場景中應用

北斗高精度定位終端的工作原理和精度范圍


高精度定位設備的精準定位功能

愛普生(EPSON)高精度導航陀螺儀——XV7001BB






 工商網監
工商網監
評論