") 關于機器視覺的詳細解析和應用分析
關于機器視覺的詳細解析和應用分析
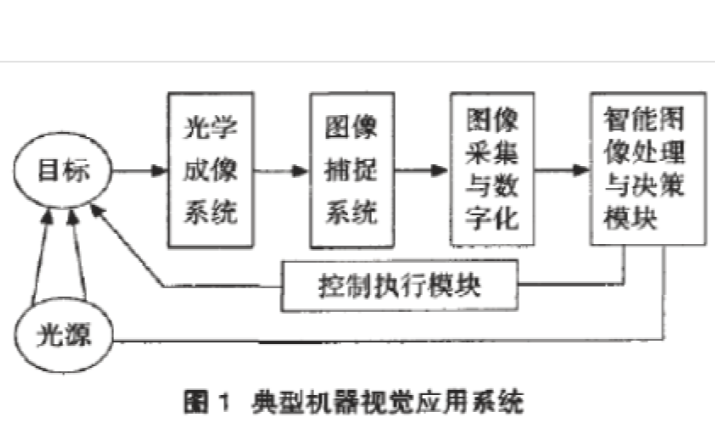
與人類操作員類似,高級的機器比如一個機器人也需要具備辨別周圍環(huán)境的能力和意識才能做出正確的決定以及采取適當?shù)男袆印F鸪鮼砜矗M管涉及到復雜技術的選擇,但是一個復雜機器的功能定義并不是很明確。然而可以說圖像識別是一個復雜的子系統(tǒng),但是它具備整個系統(tǒng)的所有設計元素。最后所有組件需要組裝起來形成一個視覺傳感系統(tǒng),不僅要滿足性能的要求還要達到成本和時間目標。從大多數(shù)案例來看,應用和設計目標的實現(xiàn)取決于正確的技術選擇。
展望未來
對于高級機器人而言其中一個最大的制約可能就是視覺系統(tǒng),尤其當采集大量的視覺數(shù)據(jù)并且需要進行實時處理的時候。在各種各樣的生產(chǎn)系統(tǒng)中對視覺傳感器具有顯著需求的時候就會面臨這種挑戰(zhàn)。市場調(diào)研公司根據(jù)市場資源判斷預計在2015年至2021年期間累積年度增長率達8%到9%之間。
根據(jù)最近的一篇報告預測“機器視覺市場在2020年之前會達到125億美元”,“驅(qū)動機器視覺市場的動力是對質(zhì)量檢測和自動化方面快速增長的需求、在制造工廠中對視覺指導機器人的需求增加、制造行業(yè)越來越多的法規(guī)要求、消費者對專用機器視覺系統(tǒng)的應用需求。”因此,自動化應用需求的增加大大促進了對更強功能的機器人和視覺系統(tǒng)的需求。
不斷發(fā)展的機器人系統(tǒng)
實際上,機器人系統(tǒng)為專用的視覺系統(tǒng)呈現(xiàn)出一些非常有趣和多樣化的示例。四種不同類型的應用呈現(xiàn)出了這個市場的多樣化:仿人型、飛行機器人、醫(yī)療機器人和管道機器人。
仿人型機器人最常見,無論是在技術雜志還是大眾媒體都能看到對其的報道。一些仿人型機器人甚至具有名字識別功能,例如Honda(本田)公司推出的ASIMO仿人型機器人、索尼公司開發(fā)的機器人具有像人類一樣重復某種活動和執(zhí)行任務的能力、三星公司和其它廠商同樣吸引了很多觀眾,他們推出的機器人具有人類的身高大小,而且能夠屈膝伸腿和踢足球,甚至還能夠唱歌和跳舞。這些機器人必須能夠采集三維傳感器的數(shù)據(jù)才能保證移動時不會摔倒,同時做出某些決策。幸運的是,這些機器人有足夠的空間來放置視覺系統(tǒng)的所有組件。
圖1:大部分應用中的機器人都需要具有視覺功能才能向前邁步(來源:維基百科)
與地球上的人類有些不同的是飛行機器人或者無人機需要采用小而輕的外觀設計,這樣才能滿足性能要求。視頻監(jiān)控系統(tǒng)時大部分無人機上都使用的主要傳感器系統(tǒng),各種各樣的智能攝像頭都集成了視覺傳感器、光敏器件、甚至數(shù)據(jù)處理功能。
機器視覺同樣被應用到醫(yī)療領域。無線膠囊內(nèi)窺(WCE)是一種診斷技術,它能夠讓醫(yī)生不用外科手術的方式查看患者的胃腸道情況,有效的避免了一些復雜或者有風險的步驟。然而,我們也需要花費數(shù)個小時反復觀看視頻錄像來尋找與癌癥或者其他疾病相關的病變和異常情況,因此出現(xiàn)了基于機器視覺的視頻分析技術,機器人系統(tǒng)采用這種技術能夠?qū)⒉杉膱D像數(shù)據(jù)進行解析,膠囊內(nèi)鏡攝像頭是2001年GivenImaging公司開發(fā)的,到目前為止全世界已經(jīng)有超過120萬的病人使用過。內(nèi)鏡技術作為一種顛覆性的技術將來不僅僅局限在一個小的膠囊攝像頭上,以后將能夠讓醫(yī)生來控制攝像頭的移動,這樣一些特殊的病理區(qū)域也能夠被觀察到,當然這種類型的內(nèi)窺鏡是否可以歸為一種機器人系統(tǒng)還有待時間的檢驗。
雖然如此,這些應用都有一些功能的元素,例如圖像傳感器、軟件、計算能力來處理和分析不斷采集和積累的數(shù)據(jù)。
圖像傳感
在所有這些應用中,有兩項技術能夠提供數(shù)字圖像采集的視覺傳感能力:CCD(電荷耦合元件)傳感器和CMOS圖像采集傳感器。
對于CCD傳感器來講,光敏區(qū)域接收的光源會被存儲并轉(zhuǎn)換為充電電荷,進而形成電壓,作為模擬信號實現(xiàn)緩存和輸出。與此相反,CMOS傳感器的每個像素點都有光感區(qū)實現(xiàn)充電電壓的轉(zhuǎn)換,通過集成的放大器、聲音修正以及數(shù)字化電路,CMOS傳感器能夠輸出數(shù)字信號。
其他系統(tǒng)設計中也采用了CMOS技術,CMOS的優(yōu)點就是便于集成,而且功耗低生成的熱量更少。它采用數(shù)字化信號輸出,與CCD相比,CMOS傳感器更夠通過更多的方式實現(xiàn)像素級別的控制。
CCD與CMOS圖像傳感器相比其唯一的優(yōu)勢就是它出現(xiàn)的時間更早,技術應用更加成熟。盡管在很多市場還存在激烈競爭,但是對于兩種圖像傳感器技術來說像素的數(shù)量和分辨率都得到了大幅度提升。為應用系統(tǒng)選擇正確傳感器一些需要詳細比較的方面包括光譜響應和光源要求例如從大面積到超小面積都具有弱光線敏感和高動態(tài)范圍。機器人系統(tǒng)中一些3D應用使用的CMOS傳感器具有更先進的特性和功能來處理復雜應用中的一些問題。
確定結(jié)果
圖像傳感器是實現(xiàn)一個視覺系統(tǒng)最關鍵的一步。下一階段需要實現(xiàn)復雜的軟件算法和高速的數(shù)據(jù)處理能力。機器人、無人機甚至包括自動駕駛汽車在內(nèi)都需要具備感知周圍三維環(huán)境的能力。對于3D視覺來講,有幾個算法已經(jīng)比較成熟了包括即時定位和映射(SLAM)、運動中恢復結(jié)構(gòu)方法(SfM)、立體視覺測距算法等等。我們的目標是高分辨率和快速的數(shù)據(jù)處理能力。很多公司和組織都在不斷的努力研究,在現(xiàn)在基礎上進行不斷的提升。
驗證一個算法是否它的功能設計要求需要通過高速數(shù)字信號處理器(DSP)來執(zhí)行這個算法,目前處理大量數(shù)據(jù)的一個方法就是通過云/服務器處理的方式。然而日益強大的DSP提供更多選擇。
舉個例子,DSP處理器如亞德諾半導體(ADI)開發(fā)的Blackfin 16位/32位嵌入式處理器能夠勝任復雜的圖像處理,對于應用的其他方面也具有軟件設計上的靈活性和可擴展性如音頻、視頻、聲音處理、多模式基帶和數(shù)據(jù)包處理、控制處理和實時安全特性。Blackfin低功耗圖像處理平臺(BLIP)面向多種室內(nèi)和室外圖像傳感應用。
圖2ADZS-BF707-BLIP2 BLIP硬件平臺預加載了軟件程序(來源:ADI)
設計視覺系統(tǒng)的一部分功能模塊是一項非常復雜的工程,當我們借助其他方面的時候,開發(fā)平臺、評估系統(tǒng)和評估板卡大大簡化了復雜的DSP設計。舉個例子,584-ADZS-BF707EZLITE Blackfin圖像處理工具套件包括圖像處理原型設計,能夠幫助工程師在Blackfin DSP平臺上快速開發(fā)復雜的圖像或者視頻處理解決方案。ADI的Blackfin BF-5xx和BF-60x系列處理器進行了優(yōu)化,集成了一些軟件的原型功能模塊。一些應用也會受益于MISRA-C兼容函數(shù)API庫,這個案例中,示例代碼展示了Blackfin DSP一些原語的使用。
圖3:亞諾德半導體584-ADZS-BF707EZLITE套件大大簡化了視覺系統(tǒng)的開發(fā)(來源:ADI)
>>>> 機器人視覺系統(tǒng)設計師當然可以選擇系統(tǒng)計算部分采用哪些方案。
在一些應用中,用戶想實現(xiàn)將攝像機無壓縮的數(shù)據(jù)流傳輸給PC,請看下面這個例子,Cypress半導體公司的EZ-USB FX3超速控制器提供了解決方法,芯片中燒錄的固件程序?qū)D像傳感器采集的數(shù)據(jù)轉(zhuǎn)換為USB視頻類(UVC)兼容的數(shù)據(jù)格式,這樣就可以對接PC主機的USB3.0接口實現(xiàn)數(shù)據(jù)傳輸。接收的一致性能夠讓攝像機使用操作系統(tǒng)(OS)自帶的驅(qū)動,并且兼容主機上的各種應用程序。如果想更加快速方便的完成固件和設備驅(qū)動程序的開發(fā),Cypress半導體公司提供了EX-USB FX3開發(fā)套件,采用的是FX3器件,包括完整的硬件和軟件解決方案。
圖4:Cypress EZ-USB FX3開發(fā)套件包括一個720P的圖像傳感器,30fps、24位彩色,簡化了視覺系統(tǒng)的開發(fā)(來源:Cypress半導體公司)
一個很容易忽略的設計細節(jié):連接器
對于復雜的系統(tǒng)尤其是圖像識別系統(tǒng)來說另一個重要的方面就是互相連接器。大量數(shù)據(jù)的高速傳輸需要進行干擾信號屏蔽以及消耗功耗。專門面向機器人系統(tǒng)應用設計的Molex CRC連接器是一個矩形的I/O信號屏蔽連接器,能夠提供7.0A至15.0A的信號/功率特性。對于小型的工業(yè)機器人系統(tǒng)和工廠自動化設備,集成控制面板的系統(tǒng)一般都集成了行業(yè)標準的連接器預留接口。
為了組裝方便并且將庫存限制在一定數(shù)量內(nèi),這個連接器采用一個集成套件的封裝方式,接口外殼支持公頭/母頭連接,增加了設計的靈活性,所有這些方面集成在一起給視覺系統(tǒng)帶來了豐富的硬件設計選擇。
圖5:專為機器人應用系統(tǒng)設計的數(shù)據(jù)連接器(來源:Molex)
一切終究會到來!
機器人智能視覺被認為是一個巨大的進步,會給現(xiàn)在很多的應用領域帶來改進并且不斷擴大市場。包括系統(tǒng)的所有方面在內(nèi),從視覺傳感器到算法、數(shù)字信號處理和連接器必然會帶來不同的影響。
1.Yingju Chen 和Jeongkyu Lee,“基于機器視覺的無線內(nèi)窺鏡視頻分析”,診斷和內(nèi)鏡治療,2012年,文章編碼:41803。
2. G. Ciuti, A. Menciassi和P. Dario,“膠囊內(nèi)窺鏡:從現(xiàn)在到面向挑戰(zhàn)”,生物醫(yī)學工程,2011年第4期59—72。
總結(jié)
Randy Frank是Randy Frank科技和協(xié)會的董事長,也是“深入智能傳感器”一書的作者。他取得了韋恩州立大學的電機工程學碩士(MSEE)學位,致力于應用傳感器、產(chǎn)品和技術市場的研究和探索。他也是SAE和IEEE協(xié)會的研究員,同時也是“設計世界”和“桌面工程”雜志的主要作者。
-
機器人
+關注
關注
211文章
28557瀏覽量
207689 -
機器視覺
+關注
關注
162文章
4396瀏覽量
120488 -
人工智能
+關注
關注
1792文章
47497瀏覽量
239211
發(fā)布評論請先 登錄
相關推薦
單片機開發(fā)案例分析與詳細解析
機器視覺的鏡頭選擇
機器視覺在工業(yè)自動化領域的前景應用解析
機器視覺應用大賞,每日一帖 轉(zhuǎn)需~
機器視覺測試系統(tǒng)具有哪些特性應用?
剛?cè)彳?b class='flag-5'>機器人設計與仿真分析實例解析
機器視覺應用的攝像頭設計
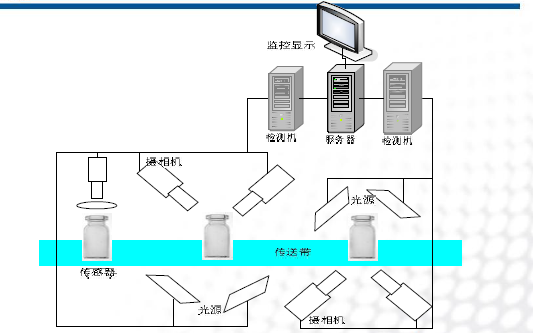
機器視覺系統(tǒng)的三種應用案例詳細說明
機器視覺的技術及其應用詳細說明





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論