 關于無人駕駛汽車的未來暢想
關于無人駕駛汽車的未來暢想
時間定格至2032年。前洛杉磯警察局警官John Spartan在冰封沉睡三十年后醒來,發現周圍的一切都發生了變化,包括駕駛技術。
在1993年上映的電影《超級戰警》中,幾乎所有的汽車都是無人駕駛,當然這些都是概念汽車。如今,十多家汽車制造領導品牌(包括奧迪、寶馬、通用、特斯拉、大眾和沃爾沃)都在研發無人駕駛技術。此外,谷歌已經開發了定制汽車,目前累積行駛距離超過100萬英里(相當于美國一個成年人駕駛75年)且沒有發生任何重大事故。
這些成就著實令人驚嘆,但很多人不禁又問:“還得多久才能普及無人駕駛汽車呢?”
汽車食物鏈錯綜復雜,包括半導體供應商、系統集成商、軟件開發人員和汽車制造商,而Imagination Technologies則將其自身定位在這條食物鏈開端的獨特位置。只有食物鏈下的所有企業密切合作、共同開發底層ADAS(高級駕駛員輔助系統)技術,才能引導市場走向無人駕駛汽車商用化的發展之路。
目前,實現ADAS功能有三大主要方法:
第一個方法便是存儲大量的地圖數據,然后在給定的環境中進行導航。但這個方法通常被認為像一輛火車行駛在隱形的鐵軌上。該方法的案例便是谷歌的無人駕駛汽車。其基本上只使用一組預先錄制好的街道高清地圖進行導航,傳感技術使用極少。在這種情況下,汽車僅依靠高速連接和傳感器聚合來維持一個固定的鏈接到提供了導航坐標的云巨型結構中。
相比之下,另一種方法便是依靠計算機視覺處理,且沒有使用預先錄制好的地圖信息。這種方法相當于復制了一個人類駕駛員,因為汽車能夠基于豐富的傳感器和高性能處理器進行實時決策。通常,這一類汽車含有多個相機以獲得廣角視圖,并使用專用的高性能、低功耗芯片,以實現超級計算機的處理能力來進行ADAS硬件和軟件算法。
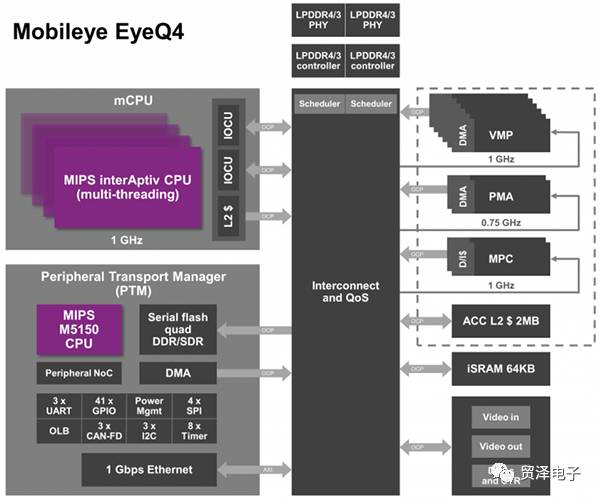
首創這一方法的公司是Mobileye,其有專門為全自動汽車設計的強大的高能效EyeQ SoC。例如,最近,處理公路自動駕駛功能需求的基于MIPS的Mobileye EyeQ3 SoC已在特拉斯汽車上使用。這種情況中,Mobileye一直使用多核多線程MIPS I級CPU來處理來自汽車各個攝像頭的數據流。
下圖中,EyeQ4 SoC內的四核四線程interAptiv CPU用作芯片的主體,引導來自攝像機及其他傳感器的信息流進入右邊VLIW 表示的2.5 TFLOPS處理快中。
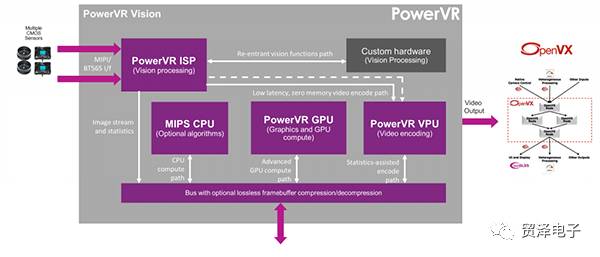
最后,第三大趨勢便是再度啟用全自動駕駛通用SoC處理器。對于已配備了用于資訊娛樂的嵌入式GPU的汽車,開發人員可以充分利用進行運算的圖像引擎計算資源來對車道、行人、車輛、建筑物、停車場等進行識別和跟蹤。例如,Luxoft的計算機視覺和增強現實技術解決方案使用了PowerVR圖像框架及附加軟件來實現ADAS功能。用于嵌入式基于PowerVR硬件的軟件框架可以快速有效地實現自動駕駛功能。
為解決下一代全自動汽車應用程序的需求,Imagination最近發布了PowerVR Series7——實現了10位支持和硬件虛擬化的GPU系列,這對于 ADAS開發人員而言是兩大重要的功能。GPU內的10位色彩深度使汽車制造商可以構建高精度的采集與顯示管道,包括圖像傳感器、視頻編碼器/解碼器及圖像引擎。
相比傳統的8位解決方案,10位多媒體子系統可以更精確地檢測車道、道路交通標志或其他標記。實現硬件虛擬化則可以在單個的設備中可靠安全地運行兩個或三個應用程序。例如,集成了MIPS軍工級 CPU及PowerVR Series7GPU的SoC可以同時在同一個芯片上優化執行Rightware Kanzi UI資訊娛樂集群和Luxoft ADAS方案,且二者的性能和可靠性都為最佳。
不管使用何種方法,無人駕駛汽車都為汽車公司、傳感器供應商和半導體行業展示了廣闊的前景。這得益于具有硬件內存管理、多線程和虛擬化功能的先進的SoC模塊和高性能微控制器。這些功能使得OEM可以實現更復雜的軟件應用程序,包括基于模型的過程控制、人工智能和先進的視覺計算。
-
傳感器
+關注
關注
2551文章
51104瀏覽量
753610 -
解碼器
+關注
關注
9文章
1143瀏覽量
40742 -
編碼器
+關注
關注
45文章
3643瀏覽量
134525 -
無人駕駛
+關注
關注
98文章
4059瀏覽量
120514
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論