 關于電機控制技術的介紹
關于電機控制技術的介紹
我們大多數人都很了解科幻小說里的機器人,但現實中真正大量增多的是能夠自我引導和遠程引導的機器。這些機器人操作預先規劃好的具體任務,比如組裝線工作,手術援助,倉庫提貨/檢索,甚至是如排除地雷等危險任務。如今的機器人不僅能夠處理高重復度的工作,還能完成在方向和動作上需求靈活性的復雜功能。
圖1:如今機器人被大量運用在小的領域如貼片機、安裝機器到大的領域如自動組裝線上,它們在組裝線上抬、放置、安裝甚至焊接和組裝零件。(圖片來源:IStockPhoto.com)
這些高性能機器的實現得益于以下幾個方面的提升:一是幫助它們“聽”、“看”、“感覺”的傳感器的提升;二是實現實時決策及動作的計算能力及算法復雜性的提升;三是用速度、準確度和機械動力來實現這些決策的電機的提升。上述的每個方面在機器人設計中都扮演了重要的角色,因為技術進步以及它們之間的協同作用都迅速在本身建立。
傳統意義上來看,電機控制對電子工程師來說一直是個難題,因為此時要考慮諸多關鍵問題和我們在常見電子所遇到的有很大不同。幸運的是,由于技術的提高,使得這些問題更容易被理解和處理,同時也使高性能表現成為可能。例如,TI公司DRV8816雙半橋電機驅動器已經集成了包括短地保護、高溫報警、高溫斷電等內部保護功能。低功耗睡眠模式關閉內部電路,以達到非常低的靜態電流。高度集成的控制器和驅動器反映了電子和電機在靈活性和集成性方面所達到的層次。
從電機選擇開始
在具體選擇電機型號時,有三個首要的因素設計師要考慮:
1.電機的最小最大轉速(還有加速度)
2.電機可以提供的最大扭矩,還有扭矩和速度曲線的關系
3.電機操作(不用傳感器和閉環控制時)的精確性和重復性
當然,在選擇電機時還有許多其它如尺寸、重量還有成本等重要因素要考慮。幾乎對于所有小到中等大小的機器人驅動器來說,驅動器電機的選擇通常有有刷直流電機,無刷直流電機(BLDC)和步進電機。(然而,某些情形下液壓與氣壓機是最好的選擇;請看欄目“利用流體動力?”。)
有刷電機,這個最古老的的直流電機技術,是最簡單、成本也最低的選擇(圖2)。由于載流刷與轉子間的接觸,電機轉子的轉動會切換(轉向)圍繞在轉子周圍繞組的場。電機的速度是所加電壓的函數,因此驅動要求不高,但管理扭矩和關聯位置很難。由于電機磨損、因刷和彈簧臟了需要清理、并且由于刷和轉子接觸時產生的火花可能會成為電子噪聲源(電磁干擾)等因素,驅動條件也存在可靠性問題。由于這些問題的存在,大多數情況下,有刷電機對于機器人設計來說是最不具有吸引力的選擇。
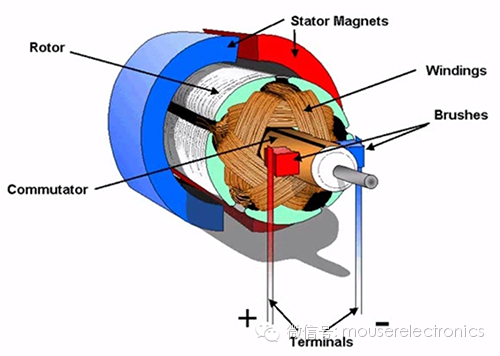
圖2:在有刷電機里,導電刷(用銅刷毛或更有可能是石墨塊制作而成)接觸轉子上的觸點。隨著轉子變向,它會切換周圍線圈電流的極性。(圖片來源:Microchip Webinar)
無刷電機(圖3)的出現開始于19世紀60年代,這得益于兩方面的發展:一是出現了堅固、體積小、低成本的永磁鐵;二是出現了體積小效率高的電子開關(通常為mos管,但有時候是具有低壓降的雙極型晶體管)來切換流向繞組的電流。周圍固定的切換線圈與旋轉芯上的磁鐵間的相互作用取代了有刷電機的機械換向。通過精確控制mos管(通常配置在H橋結構)的通斷,線圈上的磁場因此被切換。通過改變mos管通斷的頻率,電機速度從而可以被控制。另外,通過一個傳感器,電機控制器能獲取到機器人的位置,這樣對機器人的性能上能有更好的控制。
圖3:在無刷電機里,當線圈磁場與轉子上的永久磁鐵相互作用時,定子繞組里的線圈電流被電切換。圖中,空缺的轉子屬于中間位置。(圖片來源:Microchip AN885)
-
傳感器
+關注
關注
2552文章
51288瀏覽量
755140 -
機器人
+關注
關注
211文章
28557瀏覽量
207687 -
電機控制
+關注
關注
3538文章
1888瀏覽量
269030
發布評論請先 登錄
相關推薦
關于BLCD的FOC控制技術


介紹 InstaSPIN- BLDC電機控制技術
關于恩智浦整體電機控制解決方案的介紹(一)
關于恩智浦的整體電機控制解決方案的介紹(二)
1.0電機的分類及永磁同步電機的控制技術介紹






 工商網監
工商網監
評論