") 自動駕駛中的決策規(guī)劃算法概述
自動駕駛中的決策規(guī)劃算法概述
本文將分別介紹各層的主要作用與常見算法,并且比較各種算法的優(yōu)劣性及適用情景。
1. 引言
在一套完整的自動駕駛系統(tǒng)中,如果將感知模塊比作人的眼睛和耳朵,那么決策規(guī)劃就是自動駕駛的大腦。大腦在接收到傳感器的各種感知信息之后,對當(dāng)前環(huán)境作出分析,然后對底層控制模塊下達(dá)指令,這一過程就是決策規(guī)劃模塊的主要任務(wù)。同時,決策規(guī)劃模塊可以處理多么復(fù)雜的場景,也是衡量和評價自動駕駛能力最核心的指標(biāo)之一[1]。
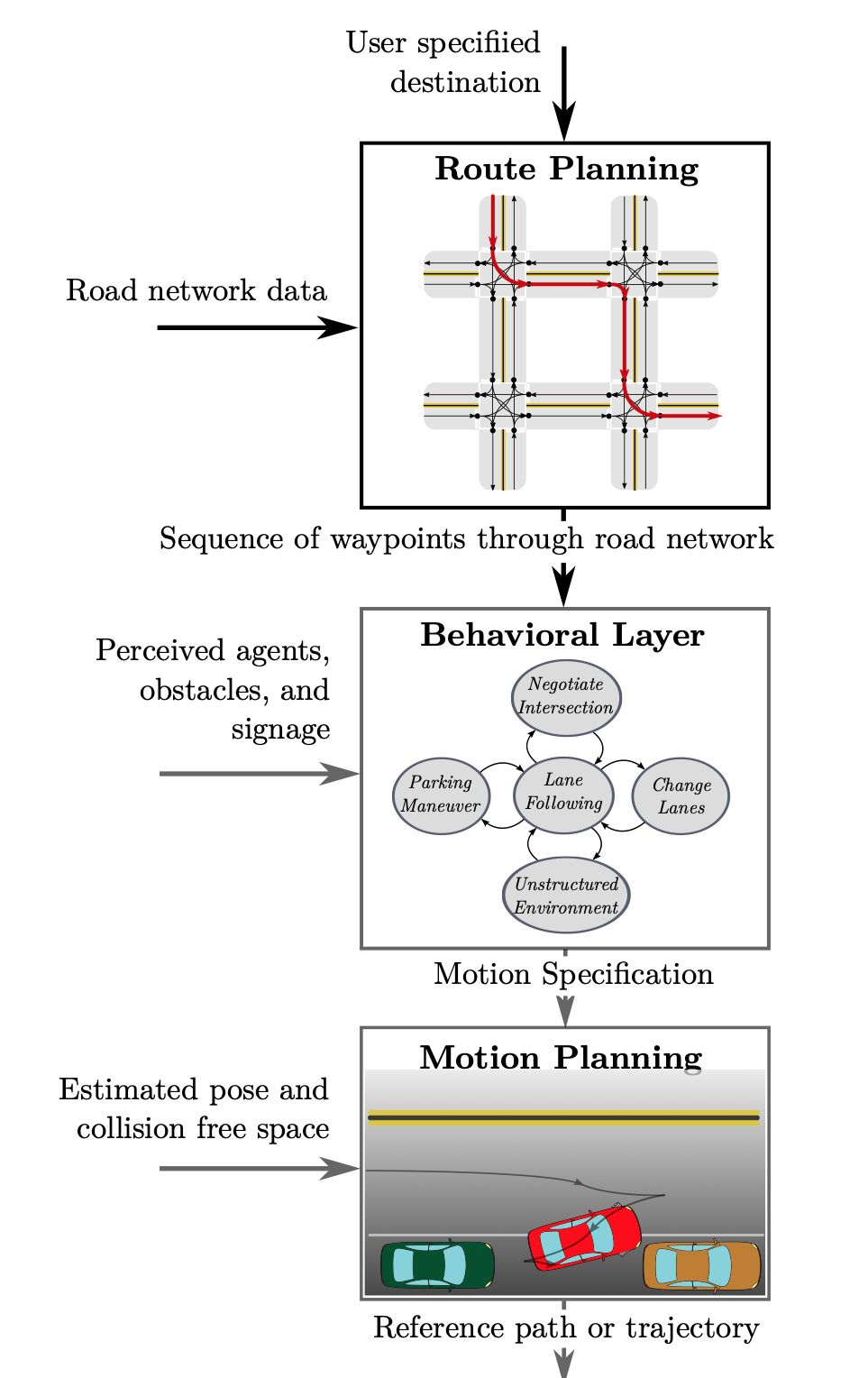
圖1. 自動駕駛系統(tǒng)中的決策規(guī)劃模塊分層結(jié)構(gòu),引用自[2]
如圖1所示,典型的決策規(guī)劃模塊可以分為三個層次。
其中,全局路徑規(guī)劃(Route Planning)在接收到一個給定的行駛目的地之后,結(jié)合地圖信息,生成一條全局的路徑,作為為后續(xù)具體路徑規(guī)劃的參考;
行為決策層(Behavioral Layer)在接收到全局路徑后,結(jié)合從感知模塊得到的環(huán)境信息(包括其他車輛與行人,障礙物,以及道路上的交通規(guī)則信息),作出具體的行為決策(例如選擇變道超車還是跟隨);
最后,運動規(guī)劃(Motion Planning)層根據(jù)具體的行為決策,規(guī)劃生成一條滿足特定約束條件(例如車輛本身的動力學(xué)約束、避免碰撞、乘客舒適性等)的軌跡,該軌跡作為控制模塊的輸入決定車輛最終行駛路徑。
2. 全局路徑規(guī)劃(Route Planning)
全局路徑規(guī)劃是指在給定車輛當(dāng)前位置與終點目標(biāo)后,通過搜索選擇一條最優(yōu)的路徑,這里的“最優(yōu)”包括路徑最短,或者到達(dá)時間最快等條件。這一過程類似于我們生活中經(jīng)常用到的“導(dǎo)航”功能,區(qū)別在于自動駕駛中使用的高精地圖與我們常見的地圖不太一樣,在高精地圖中包含了每條車道在內(nèi)的更多信息。常見的全局路徑規(guī)劃算法包括Dijkstra和A算法,以及在這兩種算法基礎(chǔ)上的多種改進(jìn)。Dijkstra算法[3]和A*算法[4]也是在許多規(guī)劃問題中應(yīng)用最為廣泛的兩種搜索算法。
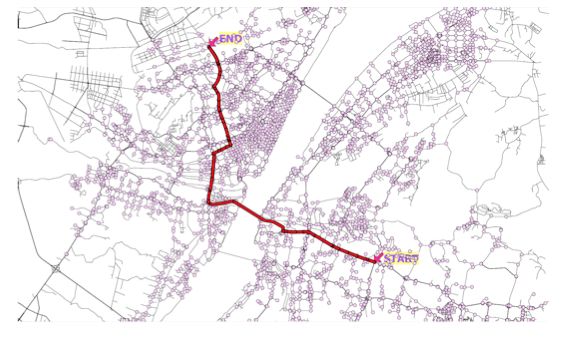
圖2. 全局路徑規(guī)劃示意
1. Dijkstra算法
Dijkstra算法是由計算機(jī)科學(xué)家Edsger W. Dijkstra在1956年提出,用來尋找圖形中節(jié)點之間的最短路徑。在Dijkstra算法中,需要計算每一個節(jié)點距離起點的總移動代價。同時,還需要一個優(yōu)先隊列結(jié)構(gòu)。對于所有待遍歷的節(jié)點,放入優(yōu)先隊列中會按照代價進(jìn)行排序。在算法運行的過程中,每次都從優(yōu)先隊列中選出代價最小的作為下一個遍歷的節(jié)點。直到到達(dá)終點為止。
Dijkstra算法的優(yōu)點是:給出的路徑是最優(yōu)的;缺點是計算時間復(fù)雜度比較高(O(N2)),因為是向周圍進(jìn)行探索,沒有明確的方向。
2. A*算法
為了解決Dijkstra算法的搜索效率問題,1968年,A算法由Stanford研究院的Peter Hart, Nils Nilsson以及Bertram Raphael發(fā)表,其主要改進(jìn)是借助一個啟發(fā)函數(shù)來引導(dǎo)搜索的過程。具體來說,A算法通過下面這個函數(shù)來計算每個節(jié)點的優(yōu)先級:

其中:
f(n) 是節(jié)點n的綜合優(yōu)先級。當(dāng)我們選擇下一個要遍歷的節(jié)點時,我們總會選取綜合優(yōu)先級最高(值最小)的節(jié)點。
g(n)是節(jié)點n距離起點的代價。
h(n) 是節(jié)點n距離終點的預(yù)計代價,這也就是A*算法的啟發(fā)函數(shù)。
3. 行為決策(Behavioral Layer)
在確定全局路徑之后,自動駕駛車輛需要根據(jù)具體的道路狀況、交通規(guī)則、其他車輛與行人等情況作出合適的行為決策。
這一過程面臨三個主要問題:
首先,真實的駕駛場景千變?nèi)f化,如何覆蓋?
其次,真實的駕駛場景是一個多智能體決策環(huán)境,包括主車在內(nèi)的每一個參與者所做出的行為,都會對環(huán)境中的其他參與者帶來影響,因此我們需要對環(huán)境中其他參與者的行為進(jìn)行預(yù)測;
最后,自動駕駛車輛對于環(huán)境信息不可能做到100%的感知,例如存在許多被障礙物遮擋的可能危險情形。
綜合以上幾點,在自動駕駛行為決策層,我們需要解決的是在多智能體決策的復(fù)雜環(huán)境中,存在感知不確定性情況的規(guī)劃問題。可以說這一難題是真正實現(xiàn)L4、L5級別自動駕駛技術(shù)的核心瓶頸之一,近年來隨著深度強(qiáng)化學(xué)習(xí)等領(lǐng)域的快速發(fā)展,為解決這一問題帶來了新的思路和曙光。
以下將行為決策層的模型分為四類分別介紹[5]:
1. 有限狀態(tài)機(jī)模型
自動駕駛車輛最開始的決策模型為有限狀態(tài)機(jī)模型[6],車輛根據(jù)當(dāng)前環(huán)境選擇合適的駕駛行為,如停車、換道、超車、避讓、緩慢行駛等模式,狀態(tài)機(jī)模型通過構(gòu)建有限的有向連通圖來描述不同的駕駛狀態(tài)以及狀態(tài)之間的轉(zhuǎn)移關(guān)系,從而根據(jù)駕駛狀態(tài)的遷移反應(yīng)式地生成駕駛動作。
有限狀態(tài)機(jī)模型因為簡單、易行,是無人駕駛領(lǐng)域目前最廣泛的行為決策模型,但該類模型忽略了環(huán)境的動態(tài)性和不確定性,此外,當(dāng)駕駛場景特征較多時,狀態(tài)的劃分和管理比較繁瑣,多適用于簡單場景下,很難勝任具有豐富結(jié)構(gòu)化特征的城區(qū)道路環(huán)境下的行為決策任務(wù)。
2. 決策樹模型
決策/行為樹模型[7]和狀態(tài)機(jī)模型類似,也是通過當(dāng)前駕駛狀態(tài)的屬性值反應(yīng)式地選擇不同的駕駛動作,但不同的是該類模型將駕駛狀態(tài)和控制邏輯固化到了樹形結(jié)構(gòu)中,通過自頂向下的“輪詢”機(jī)制進(jìn)行駕駛策略搜索。這類決策模型具備可視化的控制邏輯,并且控制節(jié)點可復(fù)用,但需要針對每個駕駛場景離線定義決策網(wǎng)路,當(dāng)狀態(tài)空間、行為空間較大時,控制邏輯將比較復(fù)雜。另外,該類模型同樣無法考慮交通環(huán)境中存在的不確定性因素。
3. 基于知識的推理決策模型
基于知識的推理決策模型由“場景特征-駕駛動作”的映射關(guān)系來模仿人類駕駛員的行為決策過程,該類模型將駕駛知識存儲在知識庫或者神經(jīng)網(wǎng)絡(luò)中,這里的駕駛知識主要表現(xiàn)為規(guī)則、案例或場景特征到駕駛動作的映射關(guān)系。進(jìn)而,通過“查詢”機(jī)制從知識庫或者訓(xùn)練過的網(wǎng)絡(luò)結(jié)構(gòu)中推理出駕駛動作。
該類模型主要包括:基于規(guī)則的推理系統(tǒng)[8]、基于案例的推理系統(tǒng)[9]和基于神經(jīng)網(wǎng)絡(luò)的映射模型[10]。
該類模型對先驗駕駛知識、訓(xùn)練數(shù)據(jù)的依賴性較大,需要對駕駛知識進(jìn)行精心整理、管理和更新,雖然基于神經(jīng)網(wǎng)絡(luò)的映射模型可以省去數(shù)據(jù)標(biāo)注和知識整合的過程,但是仍然存在以下缺點:
其“數(shù)據(jù)”驅(qū)動機(jī)制使得其對訓(xùn)練數(shù)據(jù)的依賴性較大,訓(xùn)練數(shù)據(jù)需要足夠充分[11];
將映射關(guān)系固化到網(wǎng)絡(luò)結(jié)構(gòu)中,其解釋性較差;
存在“黑箱”問題,透明性差,對于實際系統(tǒng)中出現(xiàn)的問題可追溯性較差,很難發(fā)現(xiàn)問題的根本原因。
4. 基于價值的決策模型
根據(jù)最大效用理論,基于效用/價值的決策模型的基本思想是依據(jù)選擇準(zhǔn)則在多個備選方案中選擇出最優(yōu)的駕駛策略/動作[12]。
為了評估每個駕駛動作的好壞程度,該類模型定義了效用(utility)或價值(value)函數(shù),根據(jù)某些準(zhǔn)則屬性定量地評估駕駛策略符合駕駛?cè)蝿?wù)目標(biāo)的程度,對于無人駕駛?cè)蝿?wù)而言,這些準(zhǔn)則屬性可以是安全性、舒適度、行車效率等,效用和價值可以是由其中單個屬性決定也可以是由多個屬性決定。
澳大利亞格里菲斯大學(xué)的Furda和Vlacic提出了多準(zhǔn)則決策方法從候選動作集中選擇最優(yōu)的駕駛動作[13];新加坡國立大學(xué)的Bandyopadhyay等人提出了基于POMDP的行為決策模型[14],用以解決存在感知不確定性的情況;卡內(nèi)基梅隆大學(xué)的Wei J等人提出基于PCB(Prediction and-Cost-function Based)的行為決策模型[15],其側(cè)重點在于如何構(gòu)建恰當(dāng)?shù)拇鷥r函數(shù)來指導(dǎo)對環(huán)境的預(yù)測;為了解決在多智能體參與的復(fù)雜環(huán)境中的決策問題,許多基于博弈論的模型也被研究者用來推理車輛之間的交互行為[16],[17];此外,因為在特征提取方面的優(yōu)勢,深度強(qiáng)化學(xué)習(xí)技術(shù)也開始被廣泛應(yīng)用,以完成最優(yōu)駕駛動作的生成[18]。
4. 運動規(guī)劃(Motion Planning)
在確定具體的駕駛行為之后,我們需要做的是將“行為”轉(zhuǎn)化成一條更加具體的行駛“軌跡”,從而能夠最終生成對車輛的一系列具體控制信號,實現(xiàn)車輛按照規(guī)劃目標(biāo)的行駛。這一過程稱為運動規(guī)劃(Motion Planning),運動規(guī)劃的概念在機(jī)器人領(lǐng)域已經(jīng)有較長時間的研究歷史,我們可以從數(shù)學(xué)的角度將它看做如下的一個優(yōu)化問題:
路徑規(guī)劃(Path Planning)
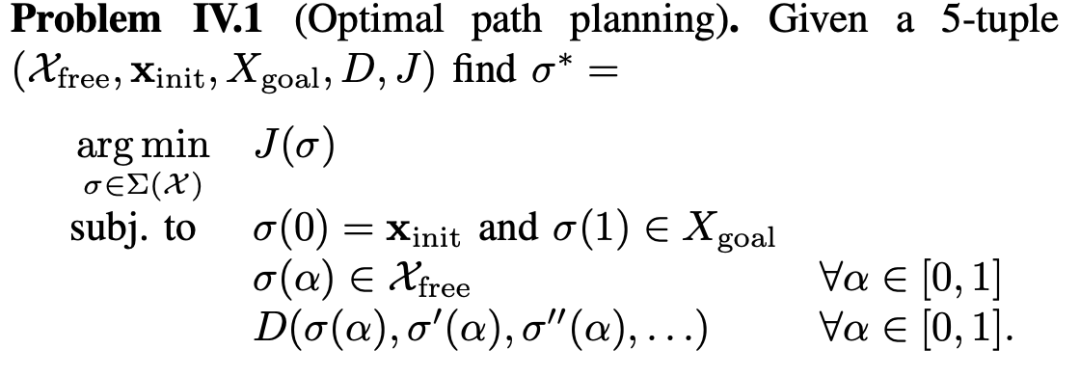
圖3. 路徑規(guī)劃的定義
在以機(jī)器人為代表的許多場景中,我們可以認(rèn)為周圍的環(huán)境是確定的。在這種情況下,所謂的路徑規(guī)劃,是指在給定的一個狀態(tài)空間Χ,尋找一個滿足一定約束條件的映射σ:[0,1]?Χ,這些約束包括:
確定的起始狀態(tài)以及目標(biāo)點所在的區(qū)域
避免碰撞
對路徑的微分約束(例如在實際問題中路徑曲率不能太小,對應(yīng)于其二階導(dǎo)數(shù)的約束)
該優(yōu)化問題的目標(biāo)泛函定義為J(σ),其具體意義可以表示為路徑長度、控制復(fù)雜度等衡量標(biāo)準(zhǔn)。
然而在自動駕駛問題中,車輛周圍的環(huán)境是持續(xù)動態(tài)變化的,因此單純的路徑規(guī)劃不能給出在行駛過程中一直有效的解,因此我們需要增加一個維度——時間T,相應(yīng)的規(guī)劃問題通常被稱為軌跡規(guī)劃。
軌跡規(guī)劃(Trajectory Planning)
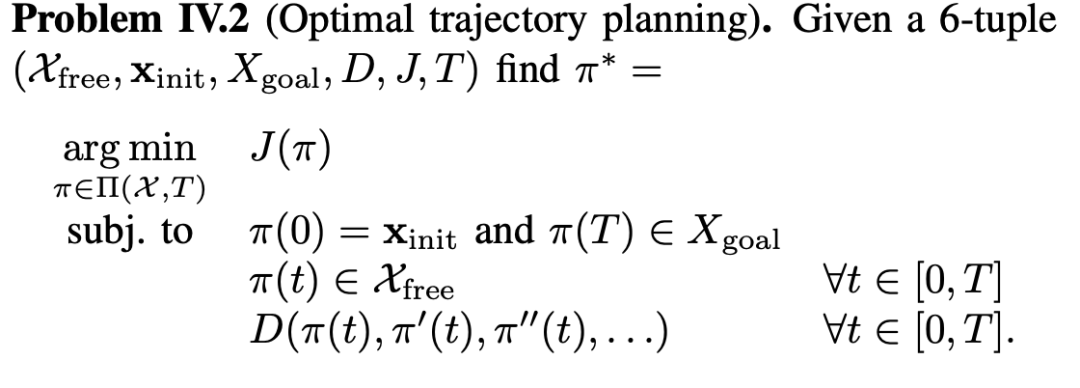
圖4. 軌跡規(guī)劃的定義
時間維度的增加為規(guī)劃問題帶來了巨大的挑戰(zhàn)。例如,對于一個在2D環(huán)境中移動一個抽象為單點的機(jī)器人,環(huán)境中的障礙物近似為多邊形的問題。路徑規(guī)劃問題可以在多項式時間內(nèi)求解,而加入時間維度的軌跡規(guī)劃問題已經(jīng)被證明是NP-hard問題。
在自動駕駛的實際場景中,無論是對車輛本身還是對周圍環(huán)境,建立更為精確的模型意味著對優(yōu)化問題更為復(fù)雜的約束,同時也意味著求解的更加困難。因此實際采用的算法都是建立在對實際場景的近似前提下,在模型精確性和求解效率二者之間尋求一個最佳的平衡點。
下文對自動駕駛領(lǐng)域目前常見的幾類運動規(guī)劃算法分別進(jìn)行介紹,在實際中,往往是其中幾類思想的結(jié)合才能最終達(dá)到比較好的規(guī)劃結(jié)果,并滿足更多的不同場景。
1. 基于搜索的規(guī)劃算法
通過搜索來解決運動規(guī)劃問題是最樸素的思路之一,其基本思想是將狀態(tài)空間通過確定的方式離散成一個圖,然后利用各種啟發(fā)式搜索算法搜索可行解甚至是最優(yōu)解。
在將狀態(tài)空間離散化的過程中,需要注意的是確保最終形成的柵格具有最大的覆蓋面積,同時不會重復(fù)。如圖5所示,左邊的柵格是由直行、左轉(zhuǎn)90°、右轉(zhuǎn)90°這三種行為生成;而如果選擇直行、左轉(zhuǎn)89°、右轉(zhuǎn)89°三種行為,最后就無法生成一個覆蓋全部區(qū)域的柵格結(jié)構(gòu)。
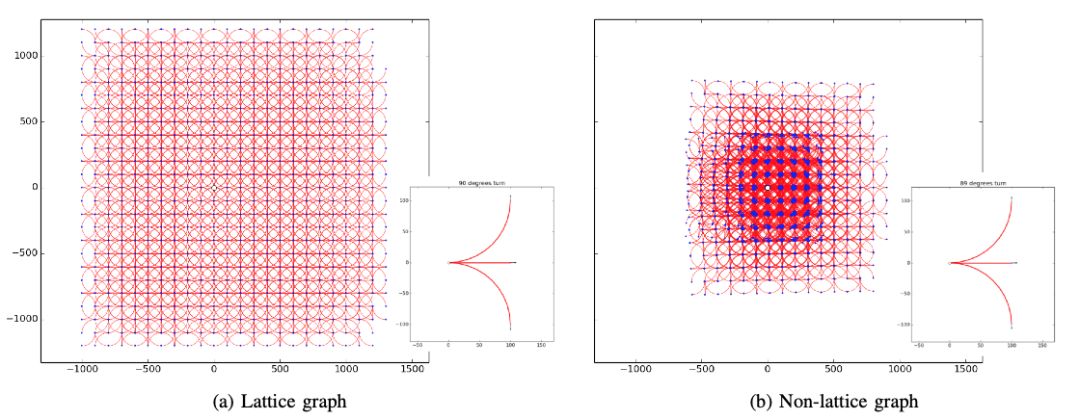
圖5. 構(gòu)建柵格圖,引用自[2]
在將狀態(tài)空間柵格化之后,我們就可以使用前文已經(jīng)介紹的Dijkstra、A*搜索算法,完成最終的規(guī)劃。然而在實際復(fù)雜環(huán)境中,柵格數(shù)目眾多,并且環(huán)境隨時間動態(tài)變化,會導(dǎo)致搜索結(jié)點過多,因此發(fā)展出了多種改進(jìn)算法,用以處理不同的具體場景:
1) Hybrid A* 算法,在A*算法的基礎(chǔ)上考慮了車的最大轉(zhuǎn)向問題,例如限定計算的路徑上車最大轉(zhuǎn)向不超過5°。該算法目前的應(yīng)用場景有車掉頭(Stanford 參加DARPA 挑戰(zhàn)賽使用的Junior車采用了該算法進(jìn)行uturn),泊車等等對方向盤控制要求較高的場景。
2)D*、D*Lite算法,事先由終點向起點進(jìn)行搜索,使用Dijkstra算法,存儲路網(wǎng)中目標(biāo)點到每個點的最短路徑長度k, 和該節(jié)點到目標(biāo)點的實際長度值h,開始情況下 k==h, 并且存儲每個節(jié)點的上一個節(jié)點,保證能夠沿著鏈接走下去。
計算結(jié)束后,獲取了一條當(dāng)時最優(yōu)路徑。當(dāng)車行駛到某個節(jié)點時,通過傳感器發(fā)現(xiàn)該節(jié)點已經(jīng)無法通行(有障礙物),則對已存儲的路網(wǎng)信息一些相關(guān)點的h值進(jìn)行修改(變大),選擇一個鄰居點滿足仍然h==k的,即仍然是最優(yōu)路徑上的點,作為下一個點。
然后走到終點。該類算法適用于在未知環(huán)境中的導(dǎo)航以及路徑規(guī)劃,廣泛用于目前各種移動機(jī)器人和自主車輛載具,例如“機(jī)遇號”和“勇氣號”火星車。
2. 基于采樣的規(guī)劃算法
通過對連續(xù)的狀態(tài)空間進(jìn)行采樣,從而將原問題近似成一個離散序列的優(yōu)化問題,這一思路也是在計算機(jī)科學(xué)中應(yīng)用最為廣泛的算法。在運動規(guī)劃問題中,基于采樣的基本算法包括概率路線圖(PRM)和快速搜索隨機(jī)樹(RRT)算法。
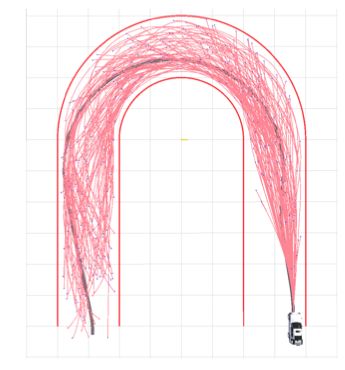
圖6. 利用RRT算法實現(xiàn)u形彎的軌跡規(guī)劃,引用自[19]
1)基本算法:概率路線圖(PRM)
預(yù)處理階段:對狀態(tài)空間內(nèi)的安全區(qū)域均勻隨機(jī)采樣n個點,每個采樣點分別與一定距離內(nèi)的鄰近采樣點連接,并丟棄掉與障礙物發(fā)生碰撞的軌跡,最終得到一個連通圖。
査詢階段:對于給定的一對初始和目標(biāo)狀態(tài),分別將其連接到已經(jīng)構(gòu)建的圖中,再使用搜索算法尋找滿足要求的軌跡。
容易看出,一旦構(gòu)建一個PRM之后,可以用于解決不同初始、目標(biāo)狀態(tài)的運動規(guī)劃問題,但是這個特性對于自動駕駛運動規(guī)劃而言是不必要的。另外PRM要求對狀態(tài)之間作精確連接,這對于存在復(fù)雜微分約束的運動規(guī)劃問題是十分困難的。
2)基本算法:快速搜索隨機(jī)樹(RRT)
樹的初始化:初始化樹的結(jié)點集和邊集,結(jié)點集只包含初始狀態(tài),邊集為空。
樹的生長:對狀態(tài)空間隨機(jī)采樣,當(dāng)采樣點落在狀態(tài)空間安全區(qū)域時,選擇當(dāng)前樹中離采樣點最近的結(jié)點,將其向采樣點擴(kuò)展(或連接)。若生成的軌跡不與障礙物發(fā)生碰撞,則將該軌跡加入樹的邊集,該軌跡的終點加人到樹的結(jié)點集。
RRT是一種增量式采樣的搜索方法,無須設(shè)置任何分辨率參數(shù)。在極限情況,該搜索樹將稠密的布滿整個空間,此時搜索樹由很多較短曲線或路經(jīng)構(gòu)成,以實現(xiàn)充滿整個空間的目的。
3)多種改進(jìn)算法
從以上基礎(chǔ)算法的描述我們可以了解到,對狀態(tài)空間進(jìn)行采樣,可以保證得到連接起始點與終點的可行解,但由于采樣過程是對整個空間進(jìn)行均勻采樣,因此效率很低;在復(fù)雜場景下無法實現(xiàn)實時求解;此外,最終規(guī)劃結(jié)果無法保證得到的可行解是最優(yōu)解。針對這些劣勢,多種改進(jìn)算法被提出并應(yīng)用于自動駕駛問題:
效率改進(jìn)--不均勻采樣
- RRT-Connect:同時構(gòu)建兩棵分別起始于初始狀態(tài)和目標(biāo)狀態(tài)的樹,當(dāng)兩棵樹生長到一起時則找到可行解。
- 啟發(fā)式(hRRT):使用啟發(fā)式函數(shù)增加擴(kuò)展代價低的結(jié)點被采樣的概率。
- 結(jié)合駕駛員模型:結(jié)合駕駛員視覺注意力模型進(jìn)行偏向性采樣,利用視覺特征信息引導(dǎo)運動規(guī)劃,使規(guī)劃出的軌跡更符合人類駕駛行為。
- 構(gòu)造新度量RG-RRT(reachability guided RT):常規(guī)類歐式距離的度量并不能真實反映構(gòu)形或狀態(tài)之間的遠(yuǎn)近,RG-RRT計算樹中結(jié)點的能達(dá)集,當(dāng)采樣點到結(jié)點的距離大于采樣點到該結(jié)點能達(dá)集的距離時, 該節(jié)點才有可能被選中進(jìn)行擴(kuò)展。
- 加入障礙物懲罰(RC-RRT、EG-RRT、ADD-RRT等):降低靠近障礙物的結(jié)點獲得擴(kuò)展的概率。
實時性改進(jìn)
- anytime RRT先快速構(gòu)建一個RRT,獲得一個可行解并記錄其代價.之后算法會繼續(xù)采樣,但僅將有利于降低可行解代價的結(jié)點插入樹中,從而逐漸獲得較優(yōu)的可行解.。
- Replanning將整個規(guī)劃任務(wù)分解為若干等時間的子任務(wù)序列,在執(zhí)行當(dāng)前任務(wù)的同時規(guī)劃下一個任務(wù)。
最優(yōu)性改進(jìn)
- PRM*、RRG、RRT*:根據(jù)隨機(jī)幾何圖理論(在狀態(tài)空間中隨機(jī)采樣m個點,并將距離小于r(n)的點連起來,就構(gòu)成了隨機(jī)幾何圖)對標(biāo)準(zhǔn)PRM 和RRT做出改進(jìn),得到了具有漸近最優(yōu)性質(zhì)的PRM*、RRG和RRT*算法
3. 直接優(yōu)化方法
在絕大多數(shù)情況下,不考慮高度的變化,自動駕駛的軌跡規(guī)劃問題是一個三維約束優(yōu)化問題(2D空間+時間T),因此,我們可以采用解耦的策略,將原始問題分解為幾個低維問題,從而大大降低求解難度。
1)Frenet坐標(biāo)系
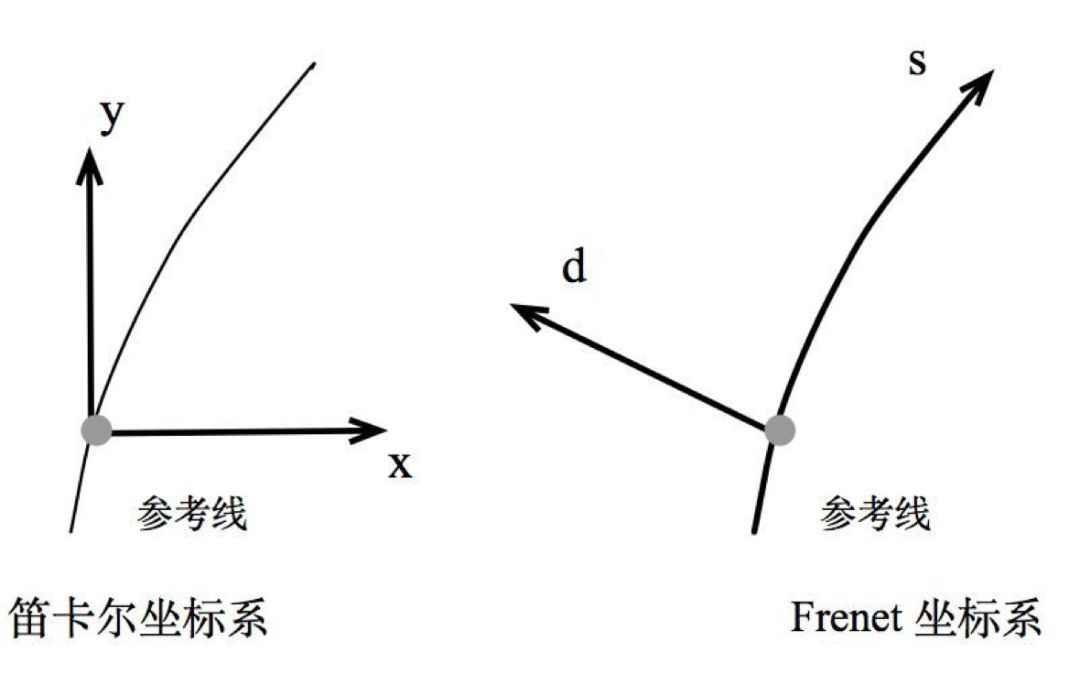
圖7. Frenet坐標(biāo)系
由于真實世界中的道路都是彎曲的,為了簡化求解優(yōu)化問題的參數(shù)表達(dá),在自動駕駛中通常采用Frenet坐標(biāo)系。
在Frenet坐標(biāo)系中,我們使用道路的中心線作為參考線,使用參考線的切線向量t和法線向量n建立一個坐標(biāo)系,如右圖所示,它以車輛自身為原點,坐標(biāo)軸相互垂直,分為s方向(即沿著參考線的方向,通常被稱為縱向,Longitudinal)和d方向(或L方向,即參考線當(dāng)前的法向,被稱為橫向,Lateral),相比于笛卡爾坐標(biāo)系(左圖),F(xiàn)renet坐標(biāo)系明顯地簡化了問題。
因為在公路行駛中,我們總是能夠簡單的找到道路的參考線(即道路的中心線),那么基于參考線的位置的表示就可以簡單的使用縱向距離S(即沿著道路方向的距離)和橫向距離L(即偏離參考線的距離)來描述。
3)路徑-速度解耦法:
在Frenet坐標(biāo)系中,路徑-速度解耦法分別優(yōu)化路徑和速度,路徑優(yōu)化主要考慮靜態(tài)障礙物,通過動態(tài)規(guī)劃生成一條靜態(tài)的參考路徑(SL維度),接著基于生成的路徑,考慮對速度的規(guī)劃(ST維度)。這一過程可以不斷迭代,從而實現(xiàn)對軌跡的實時更新。在百度的開源自動駕駛平臺Apollo中采用的EM planner就是基于類似的解決思路。這一方案具有較強(qiáng)的靈活性,可以普適性的適用于許多場景。
除此之外,也可以選擇不同的解耦方式,例如分別對縱向軌跡(ST維度)和橫向軌跡(LT維度)進(jìn)行規(guī)劃。但需要指出的是,通過解耦的方法得到的解可能不是最優(yōu)的,并且這種算法不具備完備性,在一些復(fù)雜環(huán)境可能找不到可行解。
4. 參數(shù)化曲線構(gòu)造法
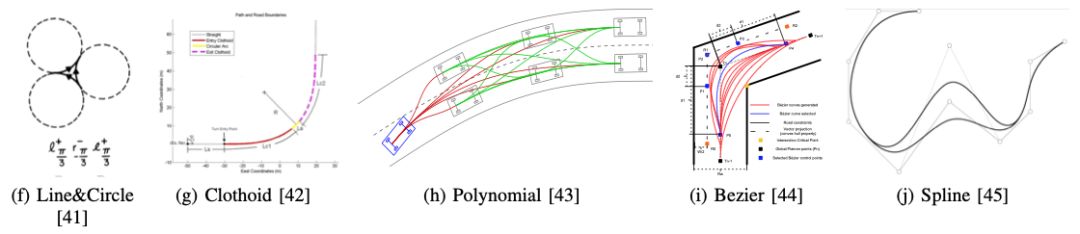
圖8. 常見的參數(shù)化曲線構(gòu)造法,引用自[19]
參數(shù)化曲線構(gòu)造法的出發(fā)點是車輛本身的約束,包括運動學(xué)與動力學(xué)的約束,因此一般規(guī)劃的路徑需要是曲率連續(xù)的。這類方法根據(jù)起始點和目標(biāo)點,考慮障礙物,通過構(gòu)造一族符合車輛約束的曲線給出一條平滑路徑。
如圖8所示,常見的曲線有Dubins曲線(由直線和圓弧構(gòu)成,是一種簡單車輛模型Dubin模型在二維空間中的最短曲線族),回旋曲線,多項式曲線,貝塞爾曲線,樣條曲線等。單純應(yīng)用參數(shù)化曲線構(gòu)造法很難滿足實際復(fù)雜場景,因此現(xiàn)在越來越多的自動駕駛系統(tǒng)將其與其他方法結(jié)合,用來對已經(jīng)規(guī)劃生成的軌跡做平滑處理,以滿足車輛運動學(xué)與動力學(xué)約束。
5. 人工勢場法
人工勢場法是受物理學(xué)中電磁場的啟發(fā),假設(shè)障礙物和目標(biāo)位置分別產(chǎn)生斥力和引力,從而可以沿著勢場的最速梯度下降去規(guī)劃路徑。這類方法的一個關(guān)鍵問題是如何選擇合適的勢場函數(shù),例如:Stephen Waydo使用流函數(shù)進(jìn)行平滑路徑的規(guī)劃[20],Robert Daily在高速車輛上提出諧波勢場路徑規(guī)劃方法[21]。在簡單場景下,人工勢場法具有較高的求解效率,但其存在的最大問題是可能陷入局部最小值,在這種情況下,所獲得的路徑不是最優(yōu),甚至可能找不到路徑。
5. 算法復(fù)雜度(Complexity)
在規(guī)劃問題中,對于一個算法的評價除了要考慮其時間和空間復(fù)雜度之外,還要考慮其是否具有完備性和最優(yōu)性,退一步的情況下考慮其是否具有概率完備性和漸進(jìn)最優(yōu)性。只要在了解這些性質(zhì)的基礎(chǔ)上,我們才能針對不同的實際場景設(shè)計和應(yīng)用不同的算法,從而達(dá)到模型復(fù)雜和效率最優(yōu)的最佳衡點。
1)完備性(Completeness):如果在起始點和目標(biāo)點間有路徑解存在,那么一定可以得到解,如果得不到解那么一定說明沒有解存在;
2)概率完備性(Probabilistically Completeness):如果在起始點和目標(biāo)點間有路徑解存在,只要規(guī)劃或搜索的時間足夠長,就一定能確保找到一條路徑解;
3)最優(yōu)性(Optimality):規(guī)劃得到的路徑在某個評價指標(biāo)上是最優(yōu)的(評價指標(biāo)一般為路徑的長度)
4)漸進(jìn)最優(yōu)性(Asymptotically optimality):經(jīng)過有限次規(guī)劃迭代后得到的路徑是接近最優(yōu)的次優(yōu)路徑,且每次迭代后都與最優(yōu)路徑更加接近,是一個逐漸收斂的過程
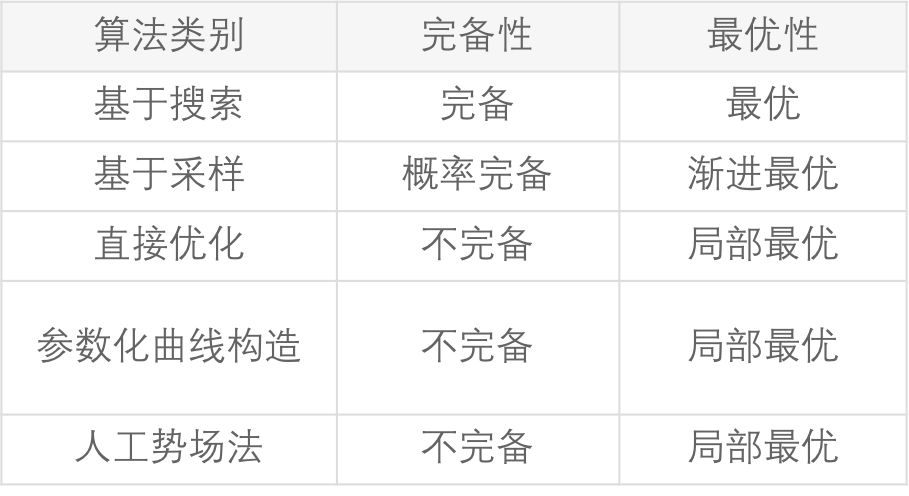
表1 常見算法比較
6. 未來發(fā)展趨勢
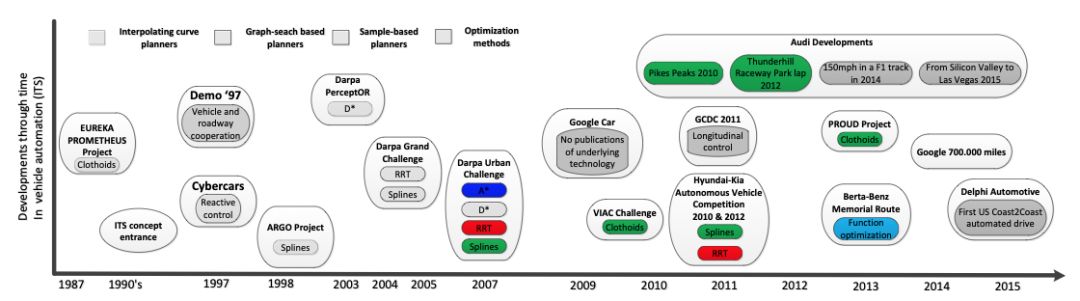
圖9. 自動駕駛發(fā)展時間線及過程中重要的運動規(guī)劃算法,引用自[19]
人類對自動駕駛的興趣最早可以追溯到1925年,近年來對自動駕駛的研究熱潮始于美國國防先進(jìn)研究項目局(Defense Advanced Research Projects Agency, DARPA )在2004-2007年舉辦的3屆自動駕駛挑戰(zhàn)賽[22],如圖9所示。在此之后,上文提到的各類決策規(guī)劃方法的有效性都被實際驗證。同時,將運動規(guī)劃方法與控制理論、狀態(tài)參數(shù)估計、機(jī)器學(xué)習(xí)等多領(lǐng)域方法相結(jié)合的解決方案也不斷出現(xiàn),成為未來的發(fā)展趨勢:
1)與車輛動力學(xué)結(jié)合:將動力學(xué)參數(shù)評價指標(biāo)和最優(yōu)規(guī)劃等結(jié)合,從最優(yōu)控制角度進(jìn)行規(guī)劃是近年采用較多的方法,在這個過程中可以充分考慮車輛動力學(xué)因素,規(guī)劃出的軌跡更加合理。例如采用模型預(yù)測控制理論(Model Predictive Control)。其不足在于:對車輛的約束越多,優(yōu)化其軌跡的難度越大,較難實現(xiàn)在線的實時計算。
2)與狀態(tài)參數(shù)估計結(jié)合:狀態(tài)參數(shù)估計可以更加準(zhǔn)確獲得車輛參數(shù),因此可以將狀態(tài)估計器加入規(guī)劃模塊中,通過在線估計車輛狀態(tài)并將其反饋給規(guī)劃器,提高軌跡質(zhì)量。例如:不同地面類型會引起車輛滑移特性的變化,進(jìn)而影響車輛狀態(tài),通過結(jié)合估計參數(shù)實時重新規(guī)劃軌跡,閉環(huán)規(guī)劃從而提高軌跡安全性。
3)與機(jī)器學(xué)習(xí)結(jié)合:隨著以神經(jīng)網(wǎng)絡(luò)為代表的人工智能的快速發(fā)展,許多傳統(tǒng)的規(guī)劃問題也帶來了新的解決思路。在自動駕駛領(lǐng)域,其發(fā)展趨勢包括:
自動駕駛車輛在復(fù)雜環(huán)境中作出最優(yōu)決策,這一問題與強(qiáng)化學(xué)習(xí)的定義非常吻合,因此如前文所述,隨著深度強(qiáng)化學(xué)習(xí)技術(shù)的快速發(fā)展,越來越多的研究團(tuán)隊開始將其應(yīng)用于自動駕駛決策規(guī)劃中,將行為決策與運動規(guī)劃模塊相融合,直接學(xué)習(xí)得到行駛軌跡。為了解決環(huán)境獎勵函數(shù)不易獲得的問題,人們還提出了首先利用逆強(qiáng)化學(xué)習(xí)(IRL)根據(jù)人類專家演示學(xué)習(xí),然后使用強(qiáng)化學(xué)習(xí)來學(xué)習(xí)最優(yōu)策略。
端到端模型:使用一個深度神經(jīng)網(wǎng)絡(luò),直接根據(jù)車輛狀態(tài)和外部環(huán)境信息得出車輛的控制信號。盡管目前的端到端模型存在類似“黑箱”的不可解釋性,但相信隨著人類對深度神經(jīng)網(wǎng)絡(luò)理解的不斷加深,這一方法因其突出的簡潔高效優(yōu)勢而具有很強(qiáng)的發(fā)展?jié)摿Α?/p>
-
算法
+關(guān)注
關(guān)注
23文章
4625瀏覽量
93126 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13904瀏覽量
166728
原文標(biāo)題:自動駕駛中的決策規(guī)劃算法概述
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
從《自動駕駛地圖數(shù)據(jù)規(guī)范》聊高精地圖在自動駕駛中的重要性

一文聊聊自動駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新

MEMS技術(shù)在自動駕駛汽車中的應(yīng)用
連接視覺語言大模型與端到端自動駕駛

聊聊自動駕駛離不開的感知硬件
車廠如何安全有效做自動駕駛路測?

FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
自動駕駛識別技術(shù)有哪些
自動駕駛的傳感器技術(shù)介紹
自動駕駛汽車傳感器有哪些
深度學(xué)習(xí)在自動駕駛中的關(guān)鍵技術(shù)
未來已來,多傳感器融合感知是自動駕駛破局的關(guān)鍵
邊緣計算與自動駕駛系統(tǒng)如何結(jié)合





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論