") 機器視覺系統(tǒng)組成 穩(wěn)定性都有重要影響
機器視覺系統(tǒng)組成 穩(wěn)定性都有重要影響
1. 引言
機器視覺的研究始于20世紀50年代二維圖像的模式識別[1],它起初被設計用來代替人眼從事檢測識別的工作,可以大大提高檢測的工作效率以及降低人眼疲勞帶來的檢測結果的不一致性。機器視覺檢測發(fā)展至今,在許多方面已經發(fā)展到可以完成人眼難以完成的工作,如高精度的測量以及對特定產品的高速分級,還有利用紅外線、紫外線、X射線等檢測技術檢測人類視覺無法檢測到的事物[2]。但機器視覺系統(tǒng)設計的難點在于如何保證其可靠性與穩(wěn)定性,無論從光源,相機等硬件上還是從圖像處理軟件上的設計,對機器視覺的穩(wěn)定性都有重要影響。
2. 機器視覺系統(tǒng)組成
典型的機器視覺系統(tǒng)一般由圖像的獲取、圖像的處理和分析、輸出或顯示三部分組成。按照視覺系統(tǒng)組成結構主要分為兩大類:PC或板卡式機器視覺系統(tǒng)(PC-Based Vision System),以及嵌入式機器視覺系統(tǒng),亦稱“智能相機(SmartCamera)。
2.1PC-Based視覺系統(tǒng)
PC式視覺系統(tǒng)是一種基于個人計算機(PC)的視覺系統(tǒng),其圖像獲取設備一般由光源、光學鏡頭、CCD或CMOS攝像機以及圖像采集卡組成,圖像處理與分析設備以一臺PC機為基礎配合圖像處理軟件,一般以顯示器作為圖像處理結果的顯示輸出。
PC-Based視覺系統(tǒng)發(fā)展到現在,可以針對不同的工作壞境滿足各式需求,如相機的選擇可以從分辨率200萬到1200萬,幀率從0到數百幀每秒甚至更高。同時,其通訊方式非常靈活,可以直接使用USB(USB2.0/USB3.0)接口、千兆網口(GigE)接口或著很方便的擴展使用火線(1394a/1394b)接口以及Camera link等接口的相機,在短距離情況下抗干擾性很強。速度上和精度上,PC-Based系統(tǒng)可以根據需求配置高速、高分辨率相機和高速的處理器,可以達到運動速度快或精度要求高的檢測要求。
但同時,基于PC的機器視覺的應用系統(tǒng)尺寸較大,除相機外,還需圖像采集卡、工控機、各種連接線纜等,在一些對設備體積限制較嚴的場合,如生產裝置內部、移送裝置上就難以滿足要求了。同時其結構復雜,多數人認為PC-Based系統(tǒng)包含較多的外部部件,各部件由不同廠家生產,涉及兼容性和連接插件等中間環(huán)節(jié),集成度較低,從而導致其穩(wěn)定性下降。相對于集成度高的智能相機,其開發(fā)周期也相對較長。
2.2嵌入式視覺系統(tǒng)
智能相機主要由圖像采集單元、通型信塊,圖像處理單元(處理軟件)三大組成部分,圖像采集單元類似于傳統(tǒng)的普通相機,將光信號轉為模擬信號或數字信號,相當于CCD/CMOS相機和圖像采集卡,圖像處理單元相當于PC-Based 系統(tǒng)的PC部分,是嵌入式視覺的核心,包括圖像處理、存儲單元以及相應的處理軟件,一般有DSP、FPGA和RISC三種硬件平臺用來完成圖像處理的運算,軟件可由外部寫入,但一般成熟的嵌入式機器視覺系統(tǒng)均將通用的圖相處里算法封裝為固定的模塊,開發(fā)人員可以根據需要選擇調用。通信模塊也是智能相機的重要組成部分,主要是將圖像處理的結果輸出到外部,智能相機一般內置以太網口通信模塊,且可支持多種網絡和總線協議。
與PC-Based 的視覺系統(tǒng)相比,嵌入式視覺系統(tǒng)存在一些明顯的優(yōu)勢,比如由于其圖像獲取單元與處理單元直接相連接,在像素一致性方面較好,抗干擾能力性較強,且由于智能相機具有較高的集成水平,體積也比PC-Based視覺系統(tǒng)要小很多,可適用于更多惡劣的工作環(huán)境。由于智能相機的高度集成性,它的圖像采集、處理與通信部件在設計與生產的過程中經過了專業(yè)人員的可靠性測試,所以其工作穩(wěn)定性要明顯高于PC-Based系統(tǒng),由于結構簡單,其維護也相對于PC-Based系統(tǒng)要簡單的多。軟件上,成熟的智能相機基本已經固化了視覺算法模塊和通訊模塊等,用戶只需要簡單的調用即可,不需要像PC-Based系統(tǒng)一樣進行系統(tǒng)底層的瑣碎的開發(fā),所以開發(fā)簡單,開發(fā)周期也短。
但相對于PC-Based視覺系統(tǒng),嵌入式視覺系統(tǒng)也存在一定劣勢,比如在精度和速度上,由于體積和圖像處理能力的限制,智能相機很難像PC-Based系統(tǒng)一樣,能夠很方便的將高速相機或高分辨相機集成到視覺系統(tǒng)中,在目前的技術條件下,通常實現同樣分辨率和速度的兩種系統(tǒng),智能相機由于需要更高要求的生產工藝以及電路設計問題,會需要高昂的成本。同時,智能相機高度集成化的特點也給它帶來了靈活性不足的問題,它的硬件和軟件開發(fā)相對固定,可擴展性較PC-Based系統(tǒng)差,在復雜的機器視覺場景下,有時單靠智能相機難以完成系統(tǒng)的功能設計,而PC-Based系統(tǒng)卻可根據實際情況選用性能合適、價格便宜的設備,也可以選擇不同的第三方軟件來完成圖像處理等工作。
3. 機器視覺檢測系統(tǒng)的不穩(wěn)定性因素
3.1成像系統(tǒng)簡介及不穩(wěn)定性因素
成像系統(tǒng)主要由相機(CCD/CMOS)、鏡頭和光源組成,是視覺檢測的基礎,成像系統(tǒng)的設計目的就是獲取合格的原始圖像,并且一個好的成像系統(tǒng)要保證系統(tǒng)運行期間圖像質量的穩(wěn)定,穩(wěn)定的圖像抓取是視覺檢測穩(wěn)定性的基本保證。
3.3.1工業(yè)相機對成像穩(wěn)定性的影響
對視覺系統(tǒng)設計者來說,工業(yè)相機的選擇主要考慮其傳感器類型、分辨率和幀率,其中傳感器分CCD與CMOS兩種,CMOS圖像傳感器集成度高,各元件、電路之間距離很近,干擾比較嚴重,成像噪聲高,CCD傳感器相機相對于CMOS相機具有靈敏度高、噪聲低和響應速度快的特點,在穩(wěn)定性方面,CCD相機的抗沖擊與震動性也較強,一般來說,CCD傳感器相機在成像質量上和穩(wěn)定性方面要優(yōu)于CMOS相機。
影響相機成像質量的另一重要因素就是相機的鏡頭,鏡頭除了需要根據具體工作狀況選擇合適的焦距、景深和光圈等參數外,一個影響系統(tǒng)檢測精度的重要因素就是圖像的幾何畸變誤差,它是光學透鏡固有的透視失真,受到制作工藝的影響,無法消除,只能彌補,雖然現在許多工業(yè)相機通過各種方法彌補鏡頭畸變產生的誤差,但在高精度的檢測領域,幾何畸變仍然會對檢測精度產生影響。
3.1.2光源對成像穩(wěn)定性的影響
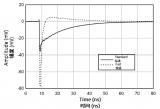
光源具有放大圖像的特征與缺陷、削弱混亂及背景的作用,直接影響輸入數據的質量,由于沒有通用的照明設備,光源的設計一直是機器視覺系統(tǒng)的難點,通常不僅需要針對每個特定的應用實例來選擇光源類型,還要根據具體環(huán)境對光源安裝、光源的照射方式進行斟酌,以達到最佳效果。不同類型的光源穩(wěn)定性存在差異,常見的可見光光源有LED光源、鹵素燈、日光燈和鈉光燈等,可見光最大的缺點是不能持續(xù)穩(wěn)定的輸出光能,如日光燈,在使用的第一個100小時內,光能會下降15%左右[4],隨著使用時間的增加,光能輸出持續(xù)下降。除可見光外,在高檢測任務的場景下,也常采用X射線和超聲波等不可見光作為光源,可以持續(xù)穩(wěn)定的輸出光能,但不利于檢測系統(tǒng)的操作,且價格昂貴。光源的不均勻性也會對圖像質量產生影響,不同方向的發(fā)光強度存在差別也會引起噪聲。可見光中LED光源的穩(wěn)定性和壽命相對于鹵素燈、日光燈等要好,響應時間短,可自由選擇顏色,運行成本也低,得到了廣泛的應用。光源的照射方式可分為背向照明、前向照明、結構光照明和頻閃照明,其設計要點是以突出圖像特征為準則。
a 日光燈光源 b LED光源
圖1 不同光源對圖像質量的影響
3.2軟件穩(wěn)定性
檢測軟件穩(wěn)定性對機器視覺的影響毋庸置疑,視覺系統(tǒng)最終會在計算機上利用軟件采用有針對性的算法進行圖像濾波,邊緣檢測和邊緣提取等一系列圖像處理,不同的圖像處理和分析手段以及不同的檢測方法與計算公式,都會帶來不同的誤差,算法優(yōu)劣決定測量精度的高低。
3.3環(huán)境因素影響
視覺系統(tǒng)工作的測量環(huán)境包括溫度、光照、電源變化、灰塵、濕度以及電磁干擾等[5],好的環(huán)境是視覺系統(tǒng)正常運行的保障。外界光照會影響照射在被測物體上的總光強,增加圖像數據輸出的噪聲,電源電壓的變化也會導致光源不穩(wěn),產生隨時間變化的噪聲。溫度變化也會對相機的性能產生影響,相機在出廠時都會標志正常工作的溫度范圍,過熱或過冷都會影響相機的正常工作。電磁干擾是工業(yè)檢測現場不可避免的干擾因素,它對工業(yè)相機電路、數據信號傳輸電路等弱電電路的影響尤為嚴重,合格的視覺產品會在出廠時經嚴格的抗干擾測試,極大的降低了外界電磁干擾對硬件電路的影響。
3.3機械結構定位影響
除成像系統(tǒng)硬件外,相機與物體之間的相對位置關系也會對圖像質量的穩(wěn)定性產生影響,如相機或工件的機械支撐結構如果存在震動,會影響檢測精度,且這也是一個難以排查的問題。在動態(tài)下檢測工件,需要考慮運動模糊對圖像精度的影響(模糊像素=物體運動速度*相機曝光時間)。另外,CCD相機與被測零件之間在理性狀況下應為相機鏡頭光軸垂直于零件所在平面,但實際使用中,由于安裝誤差或相機、工件制造誤差等原因不能保證光軸與被測平面完全垂直,存在一定角度偏差,同樣對測量精度產生影響。
a 模糊圖像b 正常圖像
圖2 機械震動造成圖像模糊
4. 保證穩(wěn)定性的解決方法
4.1硬件選擇與設計
成像系統(tǒng)的硬件選擇尤為重要,通過以上對CCD相機與CMOS相機的分析可知,如果沒有特殊的要求,比如攝像速度較高(CMOS具有更快的讀出速度),CCD傳感器相機是保證圖像質量和穩(wěn)定性的首要選擇,其中相機的分辨率和幀率主要根據檢測精度和檢測速度來選擇,通過計算檢測物體的視場大小與相機與被測物之間的距離決定合適的分辨率,考慮被測物體的運動速度與檢測精度要求選擇相機的幀率。
對于鏡頭,主要需要根據相機的極限分辨率來選取對應的鏡頭分辨率,選擇大于相機極限分辨率的相機即可,還需要根據工作距離與視野計算鏡頭的焦距,并根據被測物體與相機的距離變化選用合適的景深。在高精度測量下,要保證測量精度,除以上參數的正確選擇之外,可以選擇幾何畸變相對于普通鏡頭小的遠心鏡頭,遠心鏡頭不僅幾何畸變較小,還能減小物體距離變化帶來的誤差。
如無特殊要求而采用X射線等不可見光光源,對于可見光光源,應優(yōu)先考慮使用LED光源,在對采集圖像質量有決定性影響的光源均勻性上,LED光源明顯優(yōu)于鹵素燈、日光燈等其它光源,而且它還具有耗電低、使用壽命長和對環(huán)境無污染的優(yōu)點。同時,為了減小外界光對視覺系統(tǒng)穩(wěn)定性的影響,可以通過增加光源箱的方式屏蔽外界光源。
4.2軟件設計
4.2.1標定
相機與鏡頭由于工藝的原因,總會或多或少地導致獲取的原始圖像存在幾何畸變誤差,這種誤差不能通過硬件的優(yōu)化消除,但可以利用標定軟件算法來減弱這種誤差對測量精度的影響,相機標定的基本原理是通過相機對視場內不同角度標準圖像(通常使用標定板)的拍攝來求出相機的內、外參數以及畸變參數,建立三維坐標與圖像坐標的映射關系,從而對得到的原始畸變圖像進行矯正,通常相機標定在有精度要求的測量和定位中必須使用。
4.2.2圖像處理
硬件采集到的原始圖像最終要通過圖濾波、邊緣檢測等算法才能完成檢測功能,實現檢測結果的輸出。其中圖像濾波可以抑制采集到圖像中存在的噪聲,降低光源與灰度值不穩(wěn)定的問題,提高信噪比,其本質是通過算法保證圖像上像素點間最小方差最小。對于高精度測量系統(tǒng)來說,粗邊界像素級精度往往難以滿足要求,亞像素級邊緣定位技術在像素級別位置通過細分算法與擬合方法結合可以使邊緣位置達到0.1甚至0.01的亞像素級精度,系統(tǒng)檢測精度得到保證。
5. 總結
總的來說,機器視覺系統(tǒng)的設計需要考慮多方面的因素,除了根據需求按照常規(guī)選型參數選擇相應參數的設備之外,還需要考慮光源的穩(wěn)定性、相機的畸變誤差,以及被檢測物體與相機之間的相對運動等因素給檢測系統(tǒng)帶來的穩(wěn)定性干擾與測量誤差。只有綜合考慮這些因素進行視覺系統(tǒng)的優(yōu)化設計,才能建立穩(wěn)定、合格的機器視覺檢測系統(tǒng)。
參考文獻
[1]胥磊.機器視覺技術的發(fā)展現狀與展望[J].設備管理與維修,2016,(09):7-9.
[2]李炳銀.機器視覺及其在制造業(yè)中的應用分析[J].數字通信世界,2017,(09):95.
[3]王運哲,白雁兵,張博.機器視覺系統(tǒng)的設計方法[J].現代顯示,2011,(11):24-27.
[4]葉青松.基于機器視覺的工業(yè)檢測研究[D].江南大學,2008.
[5]董迪.基于機器視覺的高精度測量系統(tǒng)研究[D].沈陽工業(yè)大學,2016.
-
處理器
+關注
關注
68文章
19376瀏覽量
230443 -
智能
+關注
關注
8文章
1714瀏覽量
117606 -
機器視覺
+關注
關注
162文章
4396瀏覽量
120476
原文標題:機器視覺系統(tǒng)不穩(wěn)定性因素分析
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
適用于機器視覺應用的智能機器視覺控制平臺

安森美機器視覺系統(tǒng)解決方案
自動控制原理怎么判斷系統(tǒng)的穩(wěn)定性
如何確保溫度繼電器的精度和穩(wěn)定性
環(huán)路增益的穩(wěn)定性
CCD機器視覺系統(tǒng)的工作原理和特性
機器視覺系統(tǒng)五個模塊介紹

機器視覺系統(tǒng)的組成部分

如何提高旋轉花鍵運行穩(wěn)定性?
什么是熱電偶穩(wěn)定性?影響熱電偶穩(wěn)定性的主要因素
晶振的頻率容差定義 振蕩器穩(wěn)定性的重要性 影響頻率穩(wěn)定性的因素
什么是晶振的頻率穩(wěn)定性?如何確保晶振的穩(wěn)定性呢?
機器視覺系統(tǒng)中常用攝像機的分類






 工商網監(jiān)
工商網監(jiān)
評論