 庫卡機器人模擬量輸入輸出編程的詳細資料概述
庫卡機器人模擬量輸入輸出編程的詳細資料概述
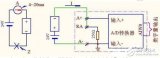
KR C4 具有 32 個模擬輸入端
為這些模擬信號需要配備可作為選項提供的總線系統,并須通過
WorkVisual 進行設計
模擬輸入端通過系統變量 $ANIN[1] ... $ANIN[32] 讀出
(每隔 12 ms 一次)循環讀取一個模擬輸入端
$ANIN[nr] 的值在 1.0 和 -1.0 之間變化,表示 +10V 至 -10V 的輸入電壓
函數:靜態賦值
直接賦值
REAL value
value = $ANIN[2]
給信號協定賦值
SIGNAL sensor $ANIN[6]
REAL value
value = sensor
動態賦值
所有用于 ANIN 指令中的變量必須已在數據列表中進行了聲明(局部或在$CONFIG.DAT 中)。
同時最多允許有三個 ANIN ON 指令。
最多兩個 ANIN ON 指令可使用相同的變量值或訪問同一個模擬輸入端。
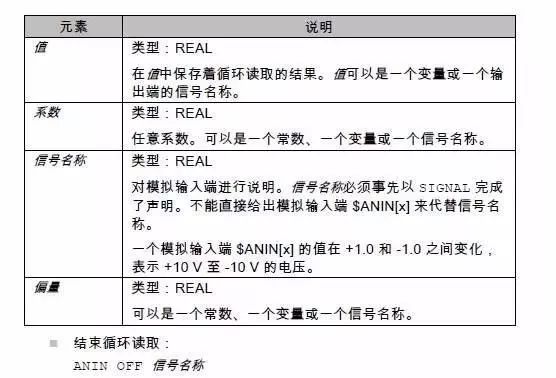
句法
開始循環讀取:
ANIN ON 值 = 系數 * 信號名稱 <±>
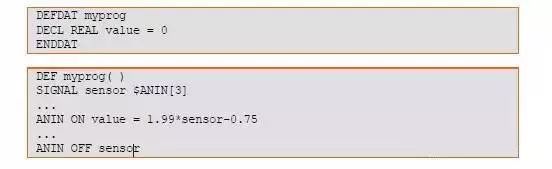
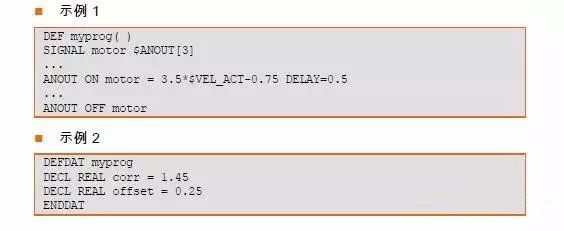
示例 1:
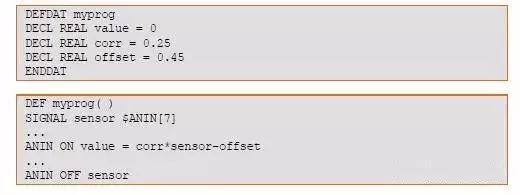
示例 2:
使用模擬輸入端編程時的操作步驟:
注意:使用模擬信號的前提條件是設計正確的總線系統及其連接的模擬信號。
ANIN ON /OFF 的編程
1. 選擇正確的模擬輸入端
2. 執行信號協定
3. 在數據列表中聲明必要的變量
4. 接通:給 ANIN ON 指令編程
5. 檢查是否最多 3 個動態輸入端激活
6. 關斷:給 ANIN OFF 指令編程
給模擬輸出端編程
KR C4 具有 32 個模擬輸出端
為這些模擬信號需要配備可作為選項提供的總線系統,并須通過
WorkVisual 進行設計
模擬輸出端通過系統變量 $ANOUT[1] ... $ANOUT[32] 讀出
(每隔 12 ms 一次)循環寫入一個模擬輸出端。
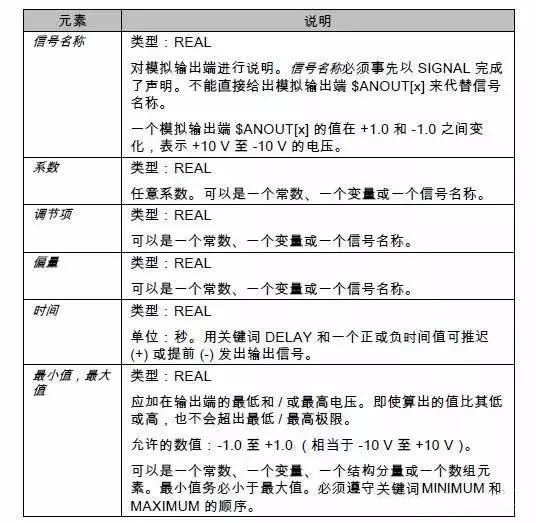
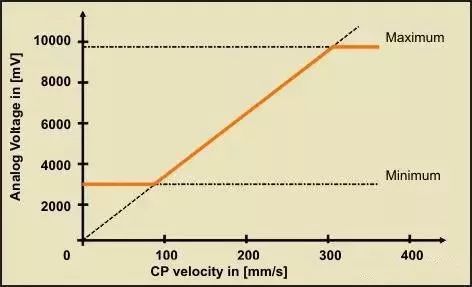
$ANOUT[nr] 的值在 1.0 和 -1.0 之間變化,表示 +10V 至 -10V 的輸出電
注意:最多可同時使用 8 個模擬輸出端(包括靜態和動態)。ANOUT觸發一次預進停止。
靜態賦值
直接賦值
ANOUT[2] = 0.7 ; 在模擬輸出端 2 上加上 7V 電壓
借助變量賦值
REAL value
value = -0.8
ANOUT[4] = value ; 在模擬輸出端 4 上加上 -8V 電壓
借助聯機表單編程
動態賦值
所有用于 ANOUT 指令中的變量必須已在數據列表中進行了聲明(局部或
在 $CONFIG.DAT 中)。
同時最多允許有四條 ANOUT ON 指令。
ANOUT 觸發一次預進停止。
句法
開始循環寫入:
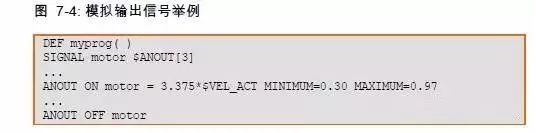
ANOUT ON 信號名稱 = 系數 * 調節項 <±>
使用模擬輸出端編程時的操作步驟:
注意:使用模擬信號的前提條件是設計正確的總線系統及其連接的模擬信號。
ANOUT ON /OFF 的編程
1. 選擇正確的模擬輸出端
2. 執行信號協定
3. 在數據列表中聲明必要的變量
4. 接通:給 ANOUT ON 指令編程
5. 檢查是否最多 4 個動態輸出端激活
6. 關斷:給 ANOUT OFF 指令編程
-
機器人
+關注
關注
211文章
28418瀏覽量
207084 -
模擬量
+關注
關注
5文章
491瀏覽量
25548 -
編程
+關注
關注
88文章
3615瀏覽量
93732
原文標題:庫卡機器人模擬量輸入輸出編程!
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
開關量和模擬量是PLC初期使用最多的兩種輸入輸出方式?
庫卡機器人MGV電源模塊維修
模擬量輸入輸出

庫卡機器人模擬量輸入輸出編程步驟及方法






 工商網監
工商網監
評論