 為解決地下石油管道監測問題,研制紅外航空遙感監測系統
為解決地下石油管道監測問題,研制紅外航空遙感監測系統
中國是石油生產與消費大國。截至2017年,中國石油管道已達到13萬千米,其中地下石油管道是主要形式。隨著地下石油管道的長度不斷增加,以及國家迅速發展帶來的地上建設不斷加快,地下管道的安全形勢日趨復雜,傳統地面人工監測的工作壓力愈發繁重。在以往的石油管道遙感監測中,衛星遙感、有人機遙感受遙感平臺作業高度的制約,主要實現管道周邊大范圍地質環境變化與人類活動的監測。現有的無人機遙感主要以0.1 ~ 0.2 m分辨率的可見光成像為主,雖然成像分辨率優于衛星遙感,但仍以監測地表變化情況為主,難以實現對地下管道的安全監測預警。
針對石油管道自身與周邊環境具有可分辨的熱輻射差異這一特性,相關研究人員對基于紅外航空遙感監測管道開展了持續的研究,已初步驗證了基于紅外遙感識別管道周邊可疑人員和輔助識別地下管道位置信息的可行性。如何基于紅外遙感影像實現對地下管道安全的精細化監測成為了無人機管道安全監測的新研究方向。
1 管道監測數據采集
為驗證無人機紅外遙感在地下石油管道監測的應用可行性,2018年1月中旬在山東東營地區開展了數據采集作業。作業無人機起降點的坐標為北緯37°22’40.64”、東經118°29’42.27”,作業時當地氣溫在-5℃ ~ 5℃之間。使用固定翼無人機開展可見光數據采集作業,使用六旋翼無人機開展紅外熱成像數據采集作業,以實現紅外影像與可見光影像的對比分析。
可見光遙感管道監測數據采集作業使用小型固定翼無人機搭載可見光相機開展。可見光相機使用索尼A7R型相機,其關鍵技術指標見表1。
表1 可見光相機的參數
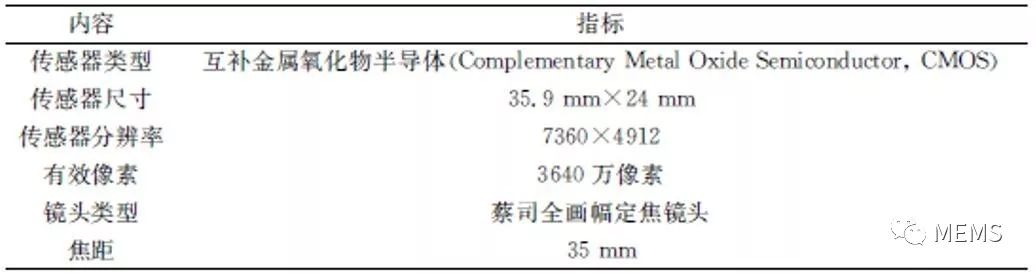
作業中,固定翼無人機飛行架次的航線總長為32 km,飛行高度為200 m,航帶有3條,航間距為80 m,拍照間距為70 m,獲取照片430張,成像分辨率為3 cm。
圖1 可見光原始照片
紅外遙感管道監測數據采集作用使用六旋翼無人機搭載紅外熱像儀開展。紅外熱像儀的型號為XM6,關鍵技術指標見表2。
表2 紅外熱像儀的參數
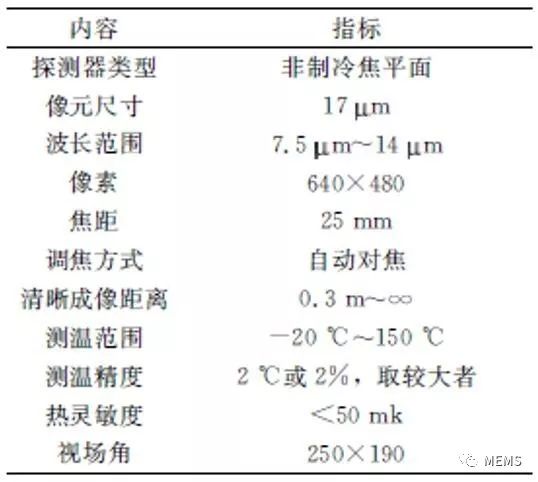
作業中,六旋翼無人機飛行2個架次,航線總長為1.5 km,飛行高度為80 m,航帶有2條,航間距為28 m,拍照間距為20 m,獲取紅外照片163張。經過渲染的偽彩色紅外照片如圖2所示。
圖2 紅外熱像儀的原始照片
2 管道監測數據的處理
在遙感數據采集作業完成后,依照以下數據處理流程對數據進行預處理與圖像拼接。
(1)預處理:對原始航拍照片進行像控點刺點、特征點匹配、空三平差等預處理,并拼接生成基本拼接影像圖。
(2)數字正射影像圖(Digital Orthophoto Map,DOM)出圖:對原始拼接圖進行勻光勻色、圖像鑲嵌等修正,形成管道監測區域DOM、數字地表模型(Digital Surface Model,DSM)。
(3)紅外影像拼接:對原始的紅外照片進行快速拼接,形成管道沿線的熱成像影像圖。
2.1 可見光數據處理分析
可見光數據經過圖像拼接處理,形成管道沿線的DOM影像圖和DSM模型,面積約為2.2平方千米。
基于可見光DOM的位置精度高、圖像分辨率高、細節信息豐富、直觀逼真等優點,結合管道路由位置信息,在DOM中進行管道標注與判讀,可實現對石油管線上方及周邊的地表建筑、施工情況的提取與識別。根據管道安全法律法規,可對地上違章建筑占壓、違章填挖等管道安全隱患實現精準分析。圖3為從本次作業生成的DOM影像圖中提取出的部分管道地表違章安全隱患。
圖3 地表建筑占壓管道或距離管道過近等隱患
DSM模型可顯示高程信息,用于管道周邊地形分析、地表植被覆蓋分析等,能夠直觀掌握管道沿線土地利用狀況和同臺信息,指導管道后期維護施工建設等。
圖4 可見光DOM、DSM與管線路由坐標的疊加
2.2 紅外數據的處理分析
紅外遙感影像是基于遙感目標熱輻射信息成像的。使用無人機對管道進行熱紅外遙感成像時,紅外影像可有效顯示管道沿線的地表熱量分布與差異信息情況,尤其在冬季低溫環境下,管道作為明顯熱量源,與地表以及人工建筑等相比溫差大,在地表熱紅外成像中呈現出明顯的亮度差異,在紅外偽彩色圖像中呈現出明顯的顏色差異。此外,與可見光影像相比,紅外影像不受復雜的光學紋理特征的干擾,能夠直觀、快速提取不同熱量的目標輪廓,尤其是管道、河流、建筑等規則性狀目標。
2.2.1 管道的識別與定位
在此次無人機遙感管道監測數據采集的作業區域中,管道左右兩側分別存在一條河流與一條道路,其余地表以農田、樹林為主。如圖5所示,此次作業采集的管道沿線紅外遙感影像圖中,管道、道路、河流與周圍農田及其他物體呈現出明顯的顏色差異。
圖5 偽彩色紅外影像拼接圖
由于管道、道路、河流均為線性目標物,且并排分布,單純依靠紋理特征難以直接判讀提取出管道。尤其是此次作業區域的河流為廢水排放河道,河水的溫度較高,因此基于溫度形成的偽彩色區分管道與河流容易被誤判,需要結合其他輔助信息對圖像進行判讀。如圖6所示,結合行駛車輛的位置信息,可提取出道路目標;結合當地地下石油管道口徑通常不超過1 m這一先驗信息,可篩除河流目標,從而提取出管道目標。
圖6 局部紅外影像拼接圖
通過對管道地表的紅外影像與可見光影像進行配準與疊加對比分析,可以看出,基于可見光的影像無法直接提取管道目標,必須依賴完整的管道路由坐標,方可在地表影像圖中勾畫出管道。若無管道路由坐標或管道路由錯誤,則完全無法提取、定位管道。基于紅外影像時,可在地表紅外影像中直接粗略識別出管道線路,基于管道拐點位置等少量管道路由坐標點,結合管道建設呈規則線性布設這一先驗信息,即可提取定位出完整的管道。
圖7 DOM與紅外拼接影像疊加
2.2.2 管道泄漏與管道裸露、淺埋識別
管道泄漏與管道裸露、淺埋是管道的重大安全問題與重大安全隱患。前者意味著管道已經被破壞,后者意味著管道存在被破壞泄漏的極大可能性。在可見光影像中,由于圖像的顏色、紋理等特征信息復雜,且管道裸露、淺埋或管道泄漏后的地表與正常地表缺少明顯差異,因此幾乎無法在可見光影像中提取識別出石油泄漏、管道淺埋信息。在紅外影像圖中,管道泄漏點與管道淺埋或裸露處經陽光照射后與周邊地表及管道正常掩埋區域的溫度不同,因此在紅外影像中會呈現出亮度或顏色差異,能夠實現直觀快速提取與定位。
本次作業采集生成的紅外影像圖中,在管道上方提取出部分高亮度處,但難以直接區分是管道泄漏或管道淺埋及裸露。因此,結合管道泄漏點會顯現出以高溫度點為圓心、向四周逐步溫度降低的近乎圓形的圖像特征,管道淺埋或裸露處通常為線性分布等經驗信息,可合理判斷出此次紅外影像圖中提取出的部分疑似為管道淺埋或裸露。
圖8 基于紅外偽彩色影像與紅外灰度圖的管道疑似淺埋情況
3 總結
通過無人機在山東東營地區采集地下石油管道的可見光遙感與紅外遙感數據,通過數據處理形成可見光DOM影像圖、DSM模型與熱成像影像圖,重點應用紅外熱成像影像結合石油管道特性信息進行了管道識別定位與安全隱患分析。研究成果表明,通過無人機掛載紅外熱像儀在冬季對地下石油管道進行遙感監測能夠有效識別出管道,并可實現對管道泄漏與管道裸露、淺埋等重大安全隱患的精細化排查與定位,能夠大幅減輕地面人工監測的工作強度,具備業務化應用能力。通過固定翼無人機搭載長焦紅外相機在200 ~ 300 m高度對地下管道進行安全監測將是下一步的研究與應用方向。
-
傳感器
+關注
關注
2551文章
51200瀏覽量
754519 -
監控系統
+關注
關注
21文章
3924瀏覽量
175260
原文標題:基于無人機紅外遙感的地下石油管道安全監測
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
遙感監測的精度與誤差分析 遙感影像分類的方法與技巧
如何利用遙感監測環境變化 遙感衛星的工作原理與種類

國內常見的石油管道外徑測量方法?
渦街流量計在石油管道運輸中的流量監測與泄漏檢測技術研究
颯特紅外移動式機場道面異物監測系統守護航運安全
基于振弦采集儀的地下綜合管廊工程安全監測技術研究


地下水自動監測系統解決方案,實時掌握地下水變化并采取措施 ?

地下水監測物聯網解決方案
振弦采集儀在地下水位監測中的可行性研究與實踐

振弦采集儀在地鐵工程中的應用與地下結構監測

才茂地下水動態監測系統方案,呵護地下“生命之源”





 工商網監
工商網監
評論