 電子發燒友App
電子發燒友App


??? 關鍵詞:電力線載波? 通訊? 機器人? 控制
1 引言
??? 機器人控制中采用各種通訊手段。這些通訊手段可分為有線通訊與無線通訊。無線通訊的優點是不必配備專用的通訊電纜,設備各部分相互獨立,配置靈活。缺點是抗干擾性能低,另外會對鄰近設備造成無線電干擾,受無線電管制的約束。有線通訊可靠性高,但需配備專用的通訊電纜,提高了系統的設計與制造成本。近年來電力線載波通訊技術發展迅速,這為機器人控制提供了新的通訊手段。電力線載波通訊技術的特點[2]是既有如RS485串行有線通訊方式的高可靠性,又不必專門鋪設通訊電纜,而是利用現有設備的電力輸電線。專用于電力線載波通訊的芯片很多,本系統采用美國Intellon公司的電力線載波通訊模塊。Intellon電力線載波通訊模塊的技術特點是[1]:采用擴譜載波通訊技術,因此抗干擾能力很強,在環境惡劣的工業電纜上也能可靠地傳輸數據。模塊與電力線間的耦合方式簡化到只有一對雙絞線。具有與EIA-600(CEBus)相兼容的通信總線標準,與主控制微處理器之間備有SPI高速傳輸接口、單5v電源,極易構成低成本的網絡產品。因此Intellon電力線載波通訊技術特別適合在機器人控制技術中應用。尤其當機器人聯網運行時其技術優勢更為明顯。
??? 下面我們以Intellon公司的SSC(Spread?Spectrum Carrier)? P200系列控制器(以下簡稱P200)為例介紹電力線載波通訊技術在機器人控制中的應用。
2 使用P200控制器構成電力線載波通訊模塊
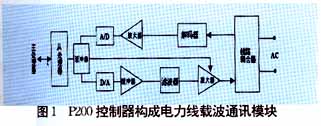
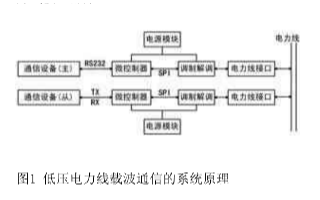
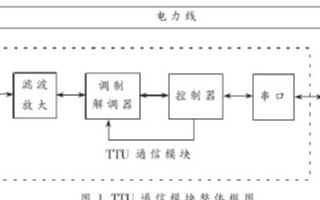
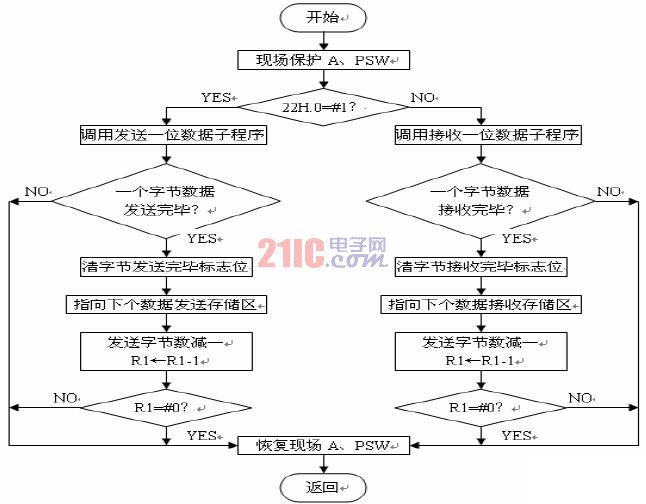
??? 圖l所示為使用P200控制器構成的電力線載波通訊模塊。這是—個全雙工的網絡傳輸器。在發送模式下工作時,主控制處理器Host首先通過SPI接口把待傳輸的數據塊高速地傳輸到P200的中央處理器DLL Microprocessor。DLL中央處理器把數據經D/A轉換成模擬量,由功率放大器AMP的放大后,經前置濾波處理,濾掉對電網產生干擾的諧波成份,再耦合到電力線上去。雖然輸入與輸出信息公用一根電力線,但由于AMP功率放大器有三態門控制開關,不會與輸入信號發生線路沖突。在接收模式下,傳輸信號通過電力線耦合進入P200模塊,首先經帶寬濾波器濾掉干擾信息,然后進入P200,在芯片內部經功率放大器Amp放大后,A/D轉換成數字量,進入P200模塊的中央處理器DLL。DLL中央處理器由SPI接口高速地把數據塊傳入主控制處理器Host進行分析處理。
3 P200數據傳輸軟件介面設計
??? 本文中P200模塊完成一個標準數據塊的雙向傳輸任務,為此設計了專用的數據傳輸軟件介面,如表1所示,這個軟件介面由59個字節的寄存器數據結構組成。這個數據結構共有7個部分,各部分的主要功能如下表:
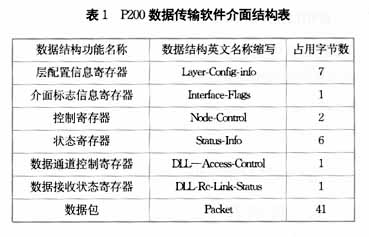
3.1 層配置信息
??? 占用7個字節,規定了系統的工作模式以及最大重新啟動次數。
3.2 傳輸介面標志信息
??? 字節只讀寄存器,寄存的標志信息反映如下事實:?
??? ·一個數據包已收到或接收出現意外。?
??? ·一個發送過程已完成或傳輸出現意外。?
??? ·物理層錯誤或主機傳輸介面出錯。?
??? ·設備的復位狀態?
3.3 控制寄存器?
??????? 2字節只寫寄存器,提供如下控制信息:?
??? ·確定主機忙閑與否;?
??? ·是否忽略掉一個數據包的接收過程;?
??? ·控制一個數據包的接收過程。?
3.4 狀態寄存器?
??? 只讀寄存器,共6個字節。寄存上次數據包傳輸狀態,P200的設備型號與版本號。
3.5 數據通道控制寄存器
??? 只寫1字節寄存器。確定數據通道建立最短時間。
3.6 數據接受狀態寄存器
??????? 1字節只讀寄存器,確定接受數據時物理層檢測失敗的錯誤類型。
3.7 數據包
??? 數據包由一個頭文件和待發送的信息組成。頭文件包含控制場和地址場。控制場包含控制接收或發送信息時的控制指令。地址場包括了數據包的地址信息。
??? 值得注意的是,P200數據傳輸軟件介面是由主控制微處理器Host Micro下載的,由于P200內部寄存器的易失性每次上電時,主控制微處理器Host Micro都必須對P200重新下載安裝一次軟件介面。
4 使用P200控制器構成的電力線載波通訊模塊在壁面清洗爬壁機器人系統中應用
??? 圖2為我校研制的爬壁清洗機器人,其主要由機器人本體,控制系統,清洗機構,地面控制器,保險與卷揚升降控制系統構成。其基本工作原理是:由地面控制器向本體控制器發出指令,機器人本體上的高速風機起動,產生較強吸附力,使機器人本體安全可靠地吸附在工作壁面上。然后驅動兩套交流伺服電機,帶動車輪使機器人在玻璃、瓷磚等壁面上快速移動,同時清洗機械開始工作完成相應清洗任務。在本體快速移動同時,卷揚升降系統也在地面控制器作用下相應升降運動,使保險懸掛機構與機器人本體隨動。
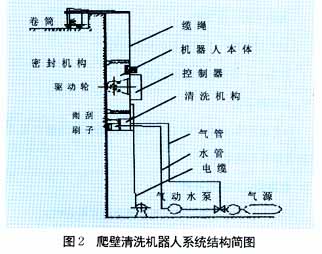
??? 由上可見,機器人系統在工作時,地面控制器、機器人主體控制器、卷揚升降系統控制器,三者間必須相互協調,交換信息,才能保證機器人的正常運行。這種信息的交換正是使用P200控制器構成的電力線載波通訊模塊,通過由地面拉上去的電力線進行電力線載波通訊完成的。
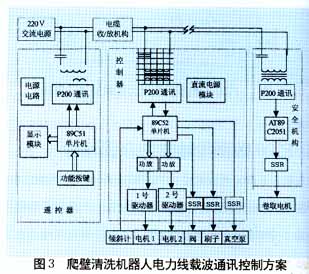
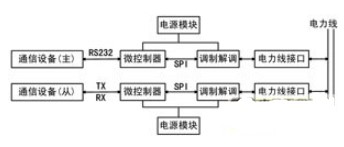
??? 圖3所示為壁面清洗機器人電力線載波通訊控制方案。當操作者按動地面控制器功能鍵發出工作指令時,單片機AT89C51把信息送到顯示模塊顯示,同時經電力線載波通訊模塊發送到電力線上。P200在發送指令信息時,附加上了地址號,由于主體控制器與卷揚控制器的P200模塊具有不同的地址號,由地面控制器發來的信息只能被地址號相符的一方所接受。主體控制器與卷揚控制器也可把相應的現場信息反饋到地面控制器,當地面控制器收到反饋信息后,由于各模塊地址唯一,會作出正確的解釋,并及時地向發信方發出回執,現場控制器在收到回執后知道信息已收到,會自動停止發送反饋信息,否則發送反饋信息會定時進行。
5 電力線載波通訊模塊在壁面清洗機器人聯網運行中應用
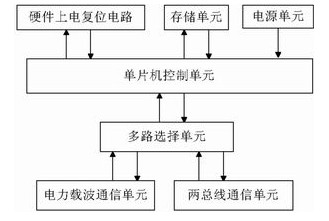
??? 在清洗一個復雜壁面時,為提高工效,可使用多臺機器人聯網運行。由于多臺機器人都使用Intellon P200模塊利用電力線通訊,如不采取措施,會發生信息傳輸的混亂[3]。為防止混亂在兩方面要采取措施。其一:機器人與機器人之間通訊如何協調。其二:機器人各部分之間如何協調。從前述內容我們知道單臺爬壁清洗機器人控制系統有地面控制器,主控制器,卷場升降控制器三大部分,事實上這三大部分的P200模塊電路構成是完全相同的。都由一個主控單片機,一個P200模塊,一個功率放大器及若干濾波器外圍電路組成,為此我們設計了一個標準的嵌入式P200模塊電路供所有功能模塊使用,如圖4所示。
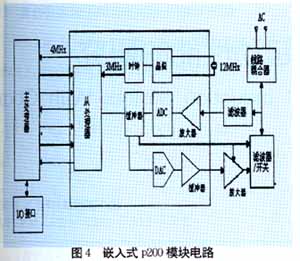
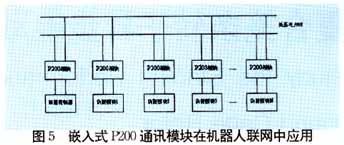
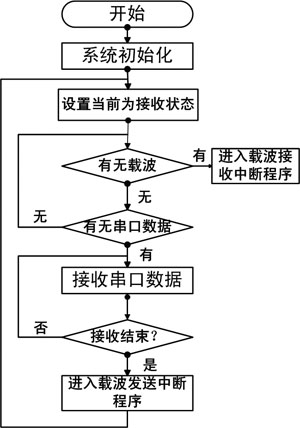
??? 在這個模塊電路中,使用了一個專用單片機AT89C2051[4]作為與外部控制電路的接口控制器,這個單片機專職服務于P200的雙向通訊任務,在其ROM存儲器中固化了本模塊的二層地址信息,高層地址信息用一個字節記錄了該模塊是那個機器人的,低層地址信息用一個字節記錄了該模塊是屬于本機器人哪個功能部分的。這樣在機器人聯網時,我們可以對多個機器人只使用一臺地面控制器,完成對各機器人各個部分的控制與測試任務。如圖5所示在這個單片機網絡中,只有地面控制器一臺主機,其他功能模塊全部為從屬分機,因此該網絡是主從式網絡。另外在網絡上已分不出整體的機器人、有效的僅是獨立的功能模塊,至于該模塊屬于哪個機器人,完成何種功能,完全由指令和相應的二層地址信息唯一地決定。注意,圖5所示的P200通訊模塊是完全獨立的,其中包括的單片機AT89C2051僅完成雙向通訊的接口任務,不參加各功能模塊的具體工作,各功能模塊的具體控制任務必須使用額外的單片機。每個P200通訊模塊使用一個專用AT89C2051的好處,其一是可以減輕各功能模塊的通訊工作壓力,使通訊工作標準化。其二是P200內部的存貯器是易失的,其軟件介面和二層地址信息都必須由Host Micro單片機上電時下載,故使用一個AT89C2051可以很好地完成這一任務,我們可以把P200的軟件介面與二層地址信息事先固化在AT89C2051中,每次上電由AT89C2051向P200下載,使P200通訊模塊與用戶控制器完全獨立。
6 結論
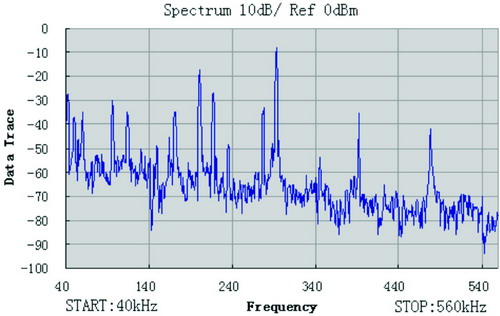
??? 本文介紹了Intellon電力線載波通訊模塊的技術特點及其在機器人控制技術中的應用。Intellon 技術的優越之處是既不象無線電通訊那樣易受空間電磁信號的干擾或受無線電管制的約束,又不必鋪設專用的通訊電纜,性能價格比較高。不足之處是由于使用公用的電力線,通訊系統是完全對外界開放的,易受來自電網的各種諧波干擾,穩定性與安全性目前還達不到專線通訊的水平。尤其對高頻諸波的干擾,必須采取措施克服,以有效地提高通訊技術水準。
參考文獻:
[1]lntellon SSC P200 PL Network Interface Controller Worksheet[S].USA:Intellon Co Ltd,1998
[2]D.Liu,E.flint,Wide Band AC Power Line Characterization[J].IEEE TRANSACTION ON CONSUMER ELECTRONICS,VOL.45,No.4,1999
[3]盧彬,等.電力系統通信網信號系統與接口技術[M].中國電力出版社,北京:1997
[4]余永權.FLASH單片機原理及應用[M].北京:電子工業出版社,1997

















 工商網監
工商網監
評論