氣動柔性球關節的模糊PID控制介紹了新型氣動柔性球關節,討論研究其控制方法。綜合模糊控制和PID 控制的特點,設計針對氣動柔性球關節的模糊PID 控制器,實現對球關節彎曲角度、偏轉方向等系統參數
2009-08-08 09:34:49
模糊控制器是一種基于模糊邏輯的控制器,通過將輸入變量和輸出變量都表示為模糊量,并運用模糊推理來實現針對復雜系統的控制。與傳統的控制器相比,模糊控制器更加適合那些難以建模或者模型不精確的系統。
2023-03-17 18:12:18 1876
1876 基于自適應模糊控制方法的噴桿位姿主動控制器
2021-07-01 16:11:07 7
7 基于模糊PID控制器的VRV空調系統設計方法
2021-07-01 16:08:323 模糊控制系統的核心是模糊控制器,由模糊化、模糊推理、模糊判決(反模糊化)三部分組成,模糊控制工作原理見圖1,其中慮線部分表示模糊控制器;e、ec分別表示實測值與設定值的偏差及偏差變化率;E,EC為
2021-01-24 10:36:002732 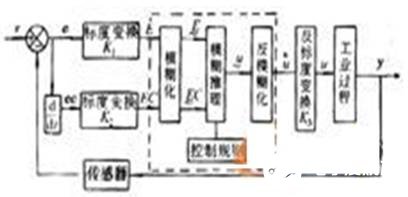
現有的模糊邏輯控制器(FLC),其控制規則一般具有下列形式
2020-07-13 10:13:313898 
模糊控制理論的提出,為我們提供了一種新的控制方法。這種方法以微處理器構成的模糊控制器為核心,以模擬人腦的思維方式為基本出發點,不需要我們對控制對象準確建模,就能很好的解決非線性、大滯后環節、變參數對象的控制問題。依靠操作人員的經驗來建立合理的模糊控制算法,就能使難控制的系統達到比較好的控制效果。
2019-08-06 08:00:003121 
在日常工業生產當中,恒溫控制應用非常廣泛。模糊控制技術是通過模仿人的思維方法,運用不確定的模糊信息進行決策以實現最佳的控制效果。模糊控制所關心的是目標而不是精確的數學模型,即研究的是控制器的本身而
2019-06-20 08:05:004526 
模糊控制(Fuzzy Control-FC)又稱為模糊邏輯語言變量控制,簡稱為模糊控制或稱為模糊邏輯控制(FLC),是以模糊集合論,模糊語言變量及模糊邏輯推理為基礎的計算機智能控制。模糊控制的核心部分為模糊控制器,模糊控制器的控制規則由計算機程序實現。圖1為模糊控制原理圖。
2018-12-13 09:15:003247 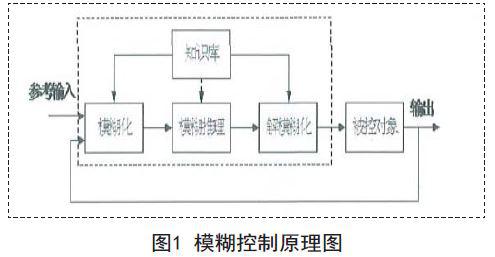
模糊控制器的設計參數主要有:各輸入、輸出變量模糊子集的隸屬度函數,模糊控制規則,輸入輸出變量的比例變換因子等。要依據設計者的經驗和反復調試才能設計出一個比較好的模糊控制器。預先采用計算機仿真方法可
2018-03-28 15:42:0535 針對海洋工況下坐底自升降式水下絞車深度難以實現精確控制的問題,提出了基于干擾觀測器PID原理的水下絞車定深控制方法。根據水下絞車的機械結構和控制系統硬件組成,設計了基于干擾觀測器的PID控制系統,并
2018-03-26 10:18:370 針對具有參數不確定性特點的高超聲速飛行器輸出跟蹤問題,提出了一種基于分層模糊系統的自適應H控制器的設計方法。為了解決模糊控制器中規則數目隨系統變量個數呈指數增長的問題,減少在線辨識參數的數量,增強
2018-01-02 18:30:150 了溫躍層剖面觀測水下滑翔器的軟硬件綜合控制系統。實現了水下滑翔器自主運行過程中的下潛、水下懸停、上升以及海洋水文信息的采集與存儲,并通過銥星通信實現溫躍層剖面觀測水下滑翔器的關鍵數據與控制命令的遠程傳輸。同時,引入擬階梯函數分析海洋溫躍層參數特征
2017-11-08 17:08:108 針對傳統的機器人控制器設計容易受到水流沖擊壓力不定的因素干擾,導致控制器穩定性差、工作效率低下的問題。提出一種6 自由度下的水下機器人控制器抗干擾設計方法,通過水下機器人 自由度空間動力學方程,及其
2017-10-28 13:04:499 基于STM32的智能溫室模糊控制器的設計
2017-09-28 10:37:4316 基于模糊PID控制器的控制方法研究_王述彥
2017-02-08 01:58:380 一類基于PID控制的新型模糊控制方法_張恩勤
2017-02-07 18:37:160 用可編程控制器PLC實現模糊控制的方法研究_劉曉霞
2017-02-07 18:37:163 基于模糊理論與常規PID控制的模糊PID控制方法研究_趙笑笑
2017-01-31 15:22:448 智能控制--模糊控制的基本原理
2016-12-25 21:23:337 智能控制--模糊控制的理論基礎
2016-12-25 21:21:545 一種智能配電網三相調壓器的模糊控制方法_王守相
2016-12-16 15:52:030 應用于直線電機的平滑切換模糊PID控制方法-2006。
2016-04-06 14:23:4012 基于模糊PID控制的導彈舵機伺服控制器-2011。
2016-04-05 16:32:3542 提出了一種基于CAN總線的分布式水下航行器控制器的設計方法,主要描述了其硬件總體設計方案和實現辦法。控制器作為分布式控制系統的一個節點,與其他節點之間以CAN總線連接并形
2013-06-08 17:54:5531 在介紹模糊控制基本原理及模糊控制器設計與分類的基礎上,推導出一種簡化PID型模糊控制器。為了驗證簡化PID型模糊控制器的性能,將其與PD及 PI型模糊控制器進行比較。其仿真結果最
2013-02-21 15:56:0053 針對目前鍋爐蒸汽壓力控制存在安全性低、穩定性差等缺點,本文將模糊控制應用于常見蒸汽壓力控制系統中,并溶入成熟的 PID控制策略,給出了模糊控制器的設計方法,通過實際使用
2012-11-23 11:56:2350 針對多路口交通控制的特征及實際交通狀況,對已有模糊控制算法進行了改進,在單路口模糊控制研究的基礎上,研究了基于相序優化模糊控制的城市區域交通信號控制系統。此方法不
2012-02-16 16:41:2543 該方法分4個步驟:(1)利用Matlab的Fuzzy Logic工具箱設計模糊控制器。(2)將模糊控制器轉換為Lookup Table的形式。(3)將制作好的控制器查找表用狀態機實現。(4)用HDL Coder將狀態機實現的模糊控制
2012-01-11 10:27:5130 為降低傳統直接轉矩控制(DTC)的轉矩脈動,提出了一種基于模糊空間矢量調制的異步電機直接轉矩控制方案,該方案將模糊控制技術和空間調制(SVM)技術相結合。模糊控制器的兩個
2011-11-14 16:21:1475 針對溫度控制系統的時變、滯后等非線性特性及控制比較復雜的問題提出了一種模糊控制方案以改善系統的控制性能. 該方案采用mamdani推理型模糊控制器代替傳統的PID控制器依據模糊
2011-09-14 15:30:2656 針對溫度控制系統的時變、滯后等非線性特性及控制比較復雜的問題,提出了一種模糊控制方案以改善系統的控制性能. 該方案采用mamdani推理型模糊控制器代替傳統的PID控制器,依據模糊
2011-09-13 10:59:32130 針對 壓電陶瓷 器件在精密定位控制中存在的遲滯、蠕變和位移非線性等不足,將模糊控制和P ID控制相結合,根據各自的特點設計了模糊推理自校正P ID控制器. 該控制器通過模糊推理來實
2011-08-24 14:47:5341 本文在分析常規PID控制和模糊控制算法的基礎上,設計了帶有自調整因子的雙模糊控制器。根據設定值與輸出值間的偏差及偏差的變化,切換模糊控制器1和模糊控制器2,完成兩組控制器
2011-07-12 11:38:442533 
結合變結構控制、自適應控制和模糊技術等特點, 提出一種自適應模糊變結構控制方法. 首先, 設計一個帶積分開關平面函數的變結構控制器, 并構造一個二維模糊邊界層寬度調節器以削
2011-06-20 16:20:2845 介紹了一種基于Lonworks現場總線的模糊控制器的實現方法 該方法采用多級遞階控制結構,利用LON技術提供的DDE 建立現場設備與PC 主機的動態通道,實現現場設備控制 該技術充分利用了
2011-06-18 17:14:0617 在常規模糊 PID控制器 的基礎上,通過增加模糊控制規則B ,從而構成變積分系數的模糊PID 控制器,通過在線調整積分系數,間接調整常規模糊控制器的模糊控制規則,以改善其性能。本文提出
2011-06-17 17:19:4198 該文將模糊控制中的可變論域思想和參數模糊自整定方法相結合,提出一種可變論域的模糊自整定控制方法,并將它成功應用在轉臺的速率控制中,為模糊控制在工程中的應用提供了一種新
2011-05-23 15:25:5616 通過對噴淋式除塵系統采用的常規模糊控制器在實際應用中存在的問題進行分析,提出一種分段線性插值的設計方法,并將該方法在模糊控制器中應用。該設計采用PLC及其常規DI/DO模塊
2011-05-03 17:29:5060 針對水下潛器實際工作的需求和水下沉浮運動特征,提出一種基于自適應模糊控制的水下潛器自主沉浮控制方法。該方法從優化隸屬函數入手,采用多層前向神經網絡的誤差反向傳播
2011-03-18 18:09:0528 在工程實際中,很多被控對象具有時變、非線性的特點,用常規的控制方法難以進行控制或者控制效果不好,為了對這類實際系統進行有效地控制,本文基于模糊控制器的基礎上,設計實現了一種雙模糊控制器,根據實際系統輸出信號的誤差大小利用兩個模糊控制器分別
2011-03-07 11:14:0056 為了提高系統的控制性能,綜合了模糊控制和PID控制的優點,提出一種基于模糊-PI雙模控制器設計方法。典型的二維模糊控制器因缺少積分環節,難以消除穩態誤差,控制的精度常常不能滿足系統要求;而PI控制器具有良好的消除穩態誤差的作用,
2011-02-12 15:24:4637 倒立擺系統是多變量、非線性、強耦合的控制系統。采用模糊控制理論研究二級倒立擺控制問題。運用最優控制方法設計融合函數以降低模糊控制器的維數,減少模糊控制規則數,
2010-12-29 17:29:0846 基于模糊控制技術的變電站電壓無功控制方法已經得到廣泛的應用,選擇合適的控制方法對控制目標的實現至關重要。本文提出了兩種變電站電壓無功模糊控制系統,選取了實例
2010-10-14 16:20:0815 有關最優模糊控制器設計的研究已經提出許多年了,也因此而提出了各種各樣的模糊建模方法。該文為模糊建模提出了一種新穎的算法――計劃協同進化算法(Schema Coevolutionary Algorithm-S
2010-08-09 15:48:3715 詳細介紹了CMAC神經網絡結構" 中間層作用函數地址的計算方法" 輸出層權值的學習算法# 并利用CMAC神經網絡對水下機器人深度模糊控制器進行了學習$ 仿真結果表明% 訓練得到的
2010-07-22 15:49:5925 文中將PID 控制器在工程整定方法的基礎上,對PID 參數作歸一化處理,然后通過模糊控制規則和模糊推理確定對PID 的參數進行調節,提出了一種新型的模糊PID 算法。從而使PID 控
2010-07-01 16:34:1557 有關最優模糊控制器設計的研究已經提出許多年了,也因此而提出了各種各樣的模糊建模方法。該文為模糊建模提出了一種新穎的算法――計劃協同進化算法(Schema Coevolutionary Algorithm-S
2010-02-23 14:13:0711 氣動柔性球關節的模糊PID控制
介紹了新型氣動柔性球關節,討論研究其控制方法。綜合模糊控制和PID 控制的特點,設計針對氣動柔性球關節的模糊PID 控制器,實現
2010-02-23 10:03:4514 應用仿人智能魯棒性高、能對付難控對象的控制特點,結合模糊RBF 神經網絡控制技術,提出仿人模糊神經網絡控制方法,對PID 控制器參數進行優化調節。該方法采用仿人智能的
2009-12-19 11:50:0312 水下作業系統是運動學冗余系統,本文將模糊推理方法融入基于任務優先運動學控制算法,對系統載體與機械手進行協調運動分配,同時對系統多個任務進行優化。通過帶有3自由
2009-12-14 16:25:4112 結合工程實踐,總結了油田電潛泵控制存在的問題。針對被控制對象特性,分析了可供選擇的控制策略,用仿人智能控制算法對系統實施控制的結果表明,文中提出的控制方法是令
2009-12-09 11:30:3910 介紹采用離線計算、在線查表插值的方法實現通用模糊控制器在()* 上實現的設計方法。提出增量式+ 位置式模糊控制輸出算法、帶死區的模糊控制算法以及二元三點插值法來改
2009-11-06 15:41:1421 本文利用模糊邏輯連續滑模控制方法,研究了非線性Willis 混沌系統的受控問題。設計基于模糊邏輯的模糊控制器,通過隸屬函數將滑模面切換函數模糊化,再采用質心法解模糊控
2009-09-09 14:57:085 將模糊控制和預測控制相結合,提出了一種新型的模糊預測控制方案,應用于非線性、大延遲、強耦合的鍋爐燃燒系統中,并運用風/煤比模糊自尋優控制方法來提高鍋爐燃燒的效
2009-09-01 11:04:0125 研究了應用粗糙集理論上、下近似定義對模糊控制規則進行拓展設計粗糙模糊控制器的方法,完成了水箱水位粗糙模糊控制器的設計,并分別進行了模糊控制和粗糙模糊控制仿真研
2009-08-10 08:27:0610 根據彈性連桿機構的特點, 給出了一種基于傳感器輸出反饋、用于控制機構振動的模糊控制器的設計方法。研究了模糊論域的形成、偏差和偏差變化率的模糊化、控制輸出的解模糊,
2009-07-08 14:18:4610 本文首先介紹了一種專門用于模糊控制系統設計的WinFACT 軟件系統。詳細 地介紹了利用WinFACT 進行自適應模糊控制系統設計的基本原理以及自適應模糊控制器的軟件程序設計方法。最
2009-06-29 09:34:188 本文對中央空調系統的模糊控制器的設計做了比較詳盡的論述,并結合MATLAB 仿真軟件對控制系統做了仿真,得到其響應曲線,并與PID 控制方法進行比較,從而得出模糊控制器在中央空
2009-06-22 09:53:2139 本文提出了一種基于數據融合的模糊控制器設計方法,該方法運用最優控制方法設計融合函數,降低模糊控制器的輸入變量維數,大大減少了模糊控制的規則數,成功的解決了模
2009-06-19 11:21:0214 模糊控制的設計核心是模糊控制器的設計。為了獲得一般模糊控制器的設計,闡明了模糊控制的原理、模糊控制的特點和重要應用。采用兩個模糊輸入量、一個模糊輸出量的模糊控
2009-06-16 09:53:1318 本文運用模糊控制與PID 控制分別對同一受控對象進行控制。通過MATLAB 仿真,表明了模糊控制與傳統的PID控制相比明顯地改善了控制系統的動態性能。關鍵詞:模糊控制,PID 控制
2009-06-11 08:54:4736 應用仿人智能魯棒性高、能對付難控對象的控制特點,結合模糊RBF 神經網絡控制技術,提出仿人模糊神經網絡控制方法,對PID 控制器參數進行優化調節。該方法采用仿人智能的
2009-06-09 10:47:3617 通過對模糊控制器設計過程的分析,提出了基于PLC 查表方式實現模糊控制的設計方法。給出了PLC 程序設計的算法流程圖及輸入量量化程序、模糊控制表查詢程序等關鍵步驟的梯
2009-04-10 16:41:5029 文中將PID控制器在工程整定方法的基礎上,對 PID參數作歸一化處理,然后通過模糊控制規則和模糊推理確定對PID 的參數進行調節,提出了一種新型的模糊PID 算法。從而使 PID 控制器
2009-04-10 10:47:2227 針對具有嚴重非線性特性的聲中和過程,提出了一種基于模糊專家模型的神經控制策略,這種方法將神經網絡逆控制器與神經元PID控制器相結合,并利用模糊專家模型所得到的預報
2009-03-18 08:47:4029 針對具有嚴重非線性的受控對象,提出了一種模糊一神經元控制方法。該方法將模糊PID控制器與神經元控制器相結合,用于改善控制器控制非線性對象的性能,以誤差、誤差變化率
2009-03-17 10:24:039 為了克服常規PID控制器的缺點,提出了一種簡化的模糊PID控制策略。首先利用擴充臨界比例帶法將PID公式簡化為只有一個控制參數Kp,然后通過模糊控制規則和模糊推理確定一張模糊
2009-03-16 09:20:2138 參數自適應模糊PID控制器的設計
溫度控制系統中,采用了非線性的隸屬度函數,以模糊控制為粗調、PID為細調。在模糊控制的基礎上,由PI
2009-02-27 09:29:312142 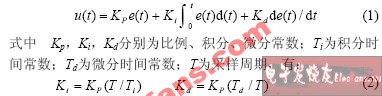
摘要在修正因子模糊控制方法中引入了在線插值算法,并將其應用于水箱液位控制系統中。實驗結果表明:此方法能從本質上消除系統的穩態誤差,明顯地改善了模糊控制系統的穩
2009-01-17 13:21:0512 模糊系統與模糊控制教程共31章,內容包括模糊數學與模糊邏輯中一些對于模糊系統理論有用的概念和原理,模糊系統的各組成部分,設計模糊系統的四種方法,模糊控制與非自適
2009-01-14 22:40:48144 單片機模糊模糊控制是目前在控制領域所采用的三種智能控制方法中最具實際意義的方法。模糊控制的采用解決了大量過去人們無法解決的問題,并且在工業控制、家用電器和各
2008-12-13 23:13:03172
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論