 電子發(fā)燒友App
電子發(fā)燒友App


早期的郵件分揀是完全的人工作業(yè)系統(tǒng),隨著科學(xué)技術(shù)的發(fā)展,分揀作業(yè)系統(tǒng)逐漸開(kāi)始使用各式各樣的自動(dòng)化機(jī)械裝備,計(jì)算機(jī)控制技術(shù)和現(xiàn)代信息技術(shù)成為信息傳遞和處理的重要手段。機(jī)械化、自動(dòng)化、智能化成為現(xiàn)代分揀系統(tǒng)的主要特點(diǎn)與發(fā)展趨勢(shì)。郵件分揀過(guò)程是郵件處理中的一個(gè)重要環(huán)節(jié),依據(jù)郵件的地址,快速、準(zhǔn)確地根據(jù)郵政編碼將發(fā)往不同地點(diǎn)的郵件從眾多郵件中分揀出來(lái)。
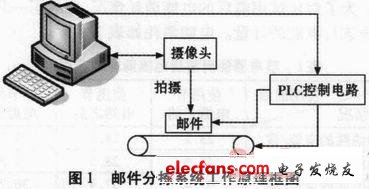
本文先將郵件都擺放到傳送帶上,通過(guò)攝像頭拍攝,獲取郵件的郵政編碼,用神經(jīng)網(wǎng)絡(luò)辨識(shí)出郵政編碼,根據(jù)郵政編碼的編號(hào)來(lái)控制郵件的走向。郵件分揀系統(tǒng)工作原理框圖如圖1所示。該系統(tǒng)分為郵件軟件識(shí)別系統(tǒng)和PLC控制分揀系統(tǒng)兩個(gè)部分。
1 郵政編碼的識(shí)別
1.1 輸入樣本的設(shè)計(jì)
將0—9這10個(gè)阿拉伯?dāng)?shù)字用一個(gè)5*3的布爾量網(wǎng)絡(luò)進(jìn)行數(shù)字化處理,例如,0用[1 1 1;1 0 1;1 0 1;1 0 1;1 1 1]表示;1用[0 1 0;0 1 0;0 1 0;0 1 0;0 1 0]表示;等等。轉(zhuǎn)換成神經(jīng)網(wǎng)絡(luò)能夠處理的輸入和輸出數(shù)據(jù),從而構(gòu)造輸入樣本。將這10個(gè)含15個(gè)布爾量網(wǎng)絡(luò)元素的輸入向量定義為15*10維的輸入矩陣X,X中每一列的15個(gè)元素對(duì)應(yīng)一個(gè)數(shù)字量按列展開(kāi)的布爾量網(wǎng)絡(luò)元素。例如:X中第一列的15
個(gè)元素[1;1;1;1;0;1;1;0;1;1;0;1;1;1;1]表示0。將10個(gè)阿拉伯?dāng)?shù)字輸入變量X中,作為神經(jīng)網(wǎng)絡(luò)的輸入樣本矩陣:
X=[X0,X1,X2,X3,X4,X5,X6,X7,X8,X9]
1.2 輸出樣本的設(shè)計(jì)
輸出樣本被定義為一個(gè)4*10維的目標(biāo)矩陣T,其每一列的4個(gè)元素對(duì)應(yīng)一個(gè)數(shù)字量,這16個(gè)數(shù)字量用其所定義的十六進(jìn)制表示。例如,用[0;0;0;0]表示0;用[0;0;0;1]表示1;等等。
1.3 網(wǎng)絡(luò)結(jié)構(gòu)的設(shè)計(jì)
為了識(shí)別這些以5*3布爾量網(wǎng)絡(luò)表示的十六進(jìn)制數(shù),所設(shè)計(jì)的網(wǎng)絡(luò)需要有10個(gè)輸入,在輸出層需要有4個(gè)神經(jīng)元來(lái)識(shí)別它,隱含層設(shè)計(jì)了9個(gè)神經(jīng)元。激活函數(shù)選擇Log-Sigmoid型傳輸函數(shù),因?yàn)樗妮敵龇秶?0-1)正好適合在學(xué)習(xí)后輸出布爾值。
1.4 網(wǎng)絡(luò)訓(xùn)練
使網(wǎng)絡(luò)能處理由于不規(guī)范的輸入所造成的噪聲,需要訓(xùn)練一個(gè)本身具有抗干擾能力的網(wǎng)絡(luò)。本文訓(xùn)練一個(gè)“理想加噪聲”輸入矢量的識(shí)別網(wǎng)絡(luò)。采用具有自適應(yīng)學(xué)習(xí)速率和附加動(dòng)量因子的Bp神經(jīng)網(wǎng)絡(luò)算法訓(xùn)練神經(jīng)網(wǎng)絡(luò)。
首先利用不含噪聲的理想輸入數(shù)據(jù)訓(xùn)練網(wǎng)絡(luò),為了使網(wǎng)絡(luò)對(duì)輸入有一定的容錯(cuò)能力,再利用不含和含有噪聲的輸入數(shù)據(jù)訓(xùn)練網(wǎng)絡(luò)。這使網(wǎng)絡(luò)學(xué)習(xí)適當(dāng)?shù)貙?duì)含有噪聲的數(shù)字進(jìn)行正確的辨識(shí)。這種以犧牲對(duì)正確數(shù)字辨識(shí)正確性為代價(jià)的采用含有噪聲的輸入數(shù)據(jù)訓(xùn)練的神經(jīng)網(wǎng)絡(luò),可能出現(xiàn)對(duì)標(biāo)準(zhǔn)數(shù)字輸入辨識(shí)錯(cuò)誤的可能性。因此,再次用理想信號(hào)進(jìn)行訓(xùn)練,從而保證網(wǎng)絡(luò)對(duì)理想輸入和輸出的正確性。
2 PLC硬件部分
分揀機(jī)系統(tǒng)是將用神經(jīng)網(wǎng)絡(luò)辨識(shí)出的4位16進(jìn)制數(shù)代表的郵政編碼的編碼信息,隨傳送帶分揀入各個(gè)代表唯一地址的郵箱中,如編碼信息代表北京的就撿入北京的郵箱。其工作過(guò)程如下:當(dāng)綠燈L2亮,紅燈L1滅,傳送帶開(kāi)始工作,電機(jī)M5驅(qū)動(dòng)帶有推頭的主鏈運(yùn)行,通過(guò)攝像頭拍攝,獲取郵件的郵政編碼,將得到的結(jié)果送入到計(jì)算機(jī)利用前面介紹的郵政編碼的識(shí)別方法,得到郵政編碼的4位16進(jìn)制值表示。當(dāng)編碼信息正確的時(shí)候,紅燈L1滅,綠燈L2閃爍,利用電機(jī)光碼器S1折合成脈沖數(shù),PLC控制器從S1中采集脈沖數(shù),當(dāng)郵件到達(dá)分撿箱時(shí),推進(jìn)器(M1~M4)將郵件推進(jìn)相應(yīng)的郵箱。隨后紅燈L1繼續(xù)滅,綠燈L2常亮,繼續(xù)分揀。若編碼信息出錯(cuò),則紅燈L1閃爍,電機(jī)M5停止動(dòng)作,待重新啟動(dòng)后,再運(yùn)行。具體結(jié)構(gòu)見(jiàn)圖2。
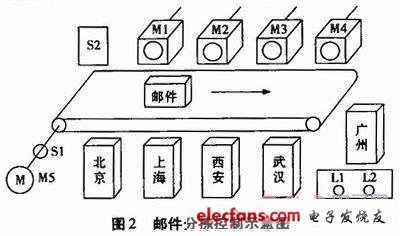
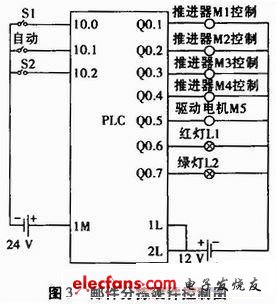
圖3為分揀機(jī)與PLC的硬件連接圖。其中S1和S2為控制開(kāi)關(guān),M1~M4為推進(jìn)器,將郵件推進(jìn)相應(yīng)的郵箱,M5為驅(qū)動(dòng)主鏈的電機(jī),L1為紅色指示燈,L2為綠色指示燈。通過(guò)PLC的RS232串口連接上位機(jī),對(duì)系統(tǒng)進(jìn)行監(jiān)控。
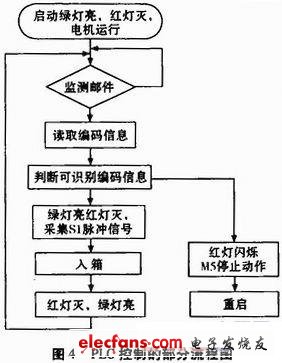
郵件入箱部分軟件設(shè)計(jì)流程主要包括:郵件檢測(cè)、編碼信息檢測(cè)、編碼信息轉(zhuǎn)化成脈沖信號(hào)、郵件入箱和出錯(cuò)控制。PLC控制部分程序流程如圖4所示。
3 結(jié)束語(yǔ)
本文采用神經(jīng)網(wǎng)絡(luò)對(duì)阿拉伯?dāng)?shù)字進(jìn)行識(shí)別,將辨識(shí)后的結(jié)果送入到PLC控制器中,通過(guò)PLC實(shí)現(xiàn)對(duì)郵件的自動(dòng)分揀,使郵件分揀系統(tǒng)朝著自動(dòng)化的方向進(jìn)一步發(fā)展。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論