 電子發燒友App
電子發燒友App


TMC428的主要特點如下:
·根據不同的應用提供有SSOP16、SOP24、DIL20三種封裝可選形式。
·可以同時對3個二相步進電機進行控制,所有電機可獨立工作。
·根據微處理器給定的電機運動參數(位置,速度、加速度),依照梯形或三角形的速度由線產生驅動脈沖波形和順序,來對電機進行位置和速度控制。它有4種工作模式。其中位置控制有RAMP模式和SOFT模式,速度控制有VELOCITY模式和HOLD模式。
·可微步控制。采用6位分辨率的微步細分。包括滿步、半步直至64細分。每個電機可分別選擇其需要的微步分辨率。滿步頻率最高達20kHz。
·通過可編程電流比例捉控制,可以使電機在不同的工作狀態下采用大小不同的工作電流。控制電機工作可在8個檔次上,分別是最大電流的12.5%、25%、37.5%、50%、62.5%、75%、87.5%、100%。
·可以對多種參數進行設置,包括最大加速度、最大速度、加速運行和位置保持時電機線圈的電流大小、微步細分分辨率、波形發生器和脈沖發生器的參數等20個多個參數。
·可在線改變運動參數(位置、速度、加速度)。
·帶有4線串行SPI接口,串行通信使用32bit數據長度的簡單協議。使用簡單。
·可通過另一個SPI口與電機驅動器連接,其數據傳輸率高達1Mbit/s。
·低功耗(1.25mA,4MHz),時鐘輸入范圍寬且時鐘頻率最高可達16MHz。
·3.3V或5V的CMOS/TTL兼容電平供電。
2 引腳功能
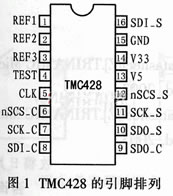
圖1所示為TMC428采用SSOP16封裝時的引腳排列,各個引腳的功能如下:
1,2,3腳(REF1,2,3):參考開關輸入1,2,3,可以外接限位開關,以引發TMC428內部中斷功能。本文沒有使用該功能。
4腳(TEST):測試腳。使用時接地,接地應盡可能在引腳附近。
5腳(CLK):時鐘輸入。
6腳(nSCS_C):SPI控制接口的片選信號輸入,低電平有效。
7腳(SCK_C):SPI控制接口的時鐘輸入。
8腳(SDI_C):SPI控制接口的數據輸入。
9腳(SDO_C):SPI控制接口的數據輸出,高阻。
10腳(SDO_S):驅動SPI接口的數據輸出。
11腳(SCK_S):驅動SPI接口的時鐘輸出。
12腳(nSCS_S):驅動SPI接口的片選信號輸出。
13腳(V5):+5V電源。
14腳(V33):+3.3V電源,應外接470nF電容器。
15腳(GND):地。
16腳(SDI_S):驅動SPI接口數據輸入,應接上拉或下拉電阻器。
3 內部結構和工作原理
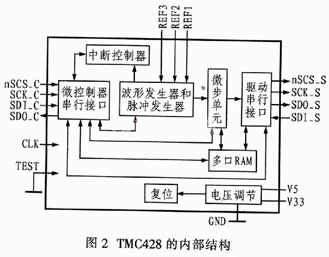
TMC428一般從微處理器獲得控制指令,微處理器則通過發送和接收固定長度的數據包對TMC428寄存器和RAM進行讀寫操作。TMC428的寄存器和片內RAM的功能有所不同。寄存器用于存儲電機總體配置參數和運動參數,而片內RAM用于存儲 驅動串行接口的配置和微步表。電機總體參數是指對驅動器菊花鏈中TMC236的配置。運動參數包括各電機的當前位置、目標位置、最大速度、最大加速度、電流比例、波形發生器和脈沖發生器參數以及微步細分分辨率等。片內RAM包括64個地址的數據空間,每個地址可存儲24位寬的數據,前32位地址數據是對驅動器菊花鏈串行通信數據包的配置,后32位地址的數據為微步細分表。
初始化以后,TMC428即可自動發送數據包到菊花鏈的每個TMC236,也就是說,驅動串行接口經過初始化后便可以自動工作,而不需要微處理器的參與。只要把位置、速度寫進指定的寄存器就可以控制電機。TMC428的多口RAM控制器可管理數據的存取時序。這樣,微處理器就可以在任何時間讀寫寄存器和片內RAM的數據。
通過波形發生器可以處理存儲在寄存器里的運動參數并計算電機運動速度曲線。脈沖發生器則根據波形發生器計算得到的速度來產生步進脈沖。步進脈沖產生時TMC428的驅動串行接口將自動發送數據包給步進電機驅動器菊花鏈以驅動步進電機。當采用微步控制時,微步單元即開始處理根據脈沖發生器產生的步進脈沖,同時根據選擇的微步分辨率來產生全步、半步和微步脈沖,并通過驅動串口送給驅動器菊花鏈。
驅動串行接口是TMC428與驅動器菊花鏈之間的通信接口。從TMC428到驅動器之間的串行數據包的長度是可配置的,以適應由不同類型和廠家的電路構成的SPI環形結構,最大數據長度為64bit。初始化后,TMC428與步進電機驅動器之間的通信是自動完成的。不同類型的帶有SPI接口的驅動器都可以混合構成菊花鏈結構與TMC428進行連接。
4 應用
4.1 兼容性
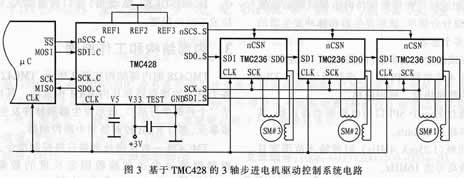
TMC428與大多數廠商生產的步進電機驅動電路兼容。它可以直接連接帶有SPI口的步進電機驅動器,也可以通過附加的器件連接常用的并口驅動器。甚至帶有步進、方向輸入的步進電機驅動器也可以由TMC428來控制。將步進電機驅動電路TMC236非常簡單地連接成串行菊花鏈結構,用TMC428構成3軸步進電機控制系統進行控制可更好地發揮TMC428的特點。
4.2 狀態檢測
實時監測電機運行狀態對整個系統的安全和控制是很重要的,TMC428就提供有狀態檢測功能。每次每處理器發送數據包給TMC428的同時,TMC428會返回數據給微處理器。大部分帶有串行口的電機驅動電路都提供有不同的狀態位(工作,不工作等)和錯誤標志(短路,開路,溫度過高等)。這樣,TMC428就可以在任何時候提供當前電機的運動參數和工作模式以及各狀態位。從電機驅動菊花鏈返回給TMC428的數據包有48bit長。TMC428將其放在二個24bit的寄存器中。這樣,微處理器就可以直接讀取這些寄存器里的信息。
5 系統構成的應用
筆者采用DSP作為系統的微處理器,結合TMC428和TMC236構成步進電機驅動控制系統。TMC236內部集成了HVCMOSFET構成的雙全橋驅動電路,它采用恒流斬波
- TMC(17020)


相關推薦
TMC428步進電機運動控制器
 71
71滿足步進電機小尺寸高集成低壓步進電機驅動控制IC滿足對空間緊湊低功耗防失步的應用要求-TRINAMIC發布TMC5272 TMC5271
TMC428中文資料
161TMC428 pdf datasheet
39基于FPGA的多軸步進電機控制器的設計
23可驅動三軸的強力步進電機伺服模塊
 9232
9232利用TMC428控制器和MCS51單片機實現步進電機驅動控制系統的設計
3064
TMC429-LI三軸步進電機控制芯片
TMC4671驅動步進電機之tmc4671配置代碼與TMC4671模擬編碼器設置
963
基于SOPC步進電機多軸控制器的設計
12步進電機控制器的應用設置
827步進電機驅動芯片TMC260
2TMC457-BC單軸步進電機控制芯片
電機驅動TMC5160詳解
4電機驅動器及控制器 Trinamic TMC4671-ES參數特性介紹
850
步進電機控制器原理_步進電機控制器編程實例
15458TMC2160步進電機驅動芯片
572
3軸步進電機控制器和驅動單元TMCM-3230
兩相雙極步進電機的三軸電機控制器/驅動板TMCM-3351
如何使用TDA2030實現步進電機控制器的設計
2109
步進電機控制器原理 步進電機控制器的應用設置
0TMC5160步進電機驅動芯片簡析
0TMC2208-LA單軸步進驅動器可替代A4988
510
TMC4361A是一種小型化、高性能的驅動步進電機的運動控制器
6667ADITrinamic推出新款集成驅動控制一體的步進電機IC-TMC5272 TMC52
31
TMC2041 - Trinamic新型雙軸步進電機驅動器
12311使用TMC4671在一天內完成您的伺服控制器
14487TMC429-I 三軸步進電機運動控制芯片
步進電機控制器與伺服電機控制器的區別
7522TMC5041步進電機雙軸驅控一體芯片簡介
408
TMC4331A-LA單軸步進電機運動控制芯片
基于FPGA的步進電機控制器設計
2351
關于TMC2209步進電機驅動模塊–SilentStepStick的知識概況
5使用STM32控制TMC5160步進電機控制驅動芯片的代碼和電路圖及工程文件
565單軸步進電機控制器/驅動器模塊TMCM-1316StepRocker
TMC2130-LA單軸步進電機驅動芯片
TMC4330A-LA步進電機控制芯片
步進電機的硬件電路設計,步進電機驅動原理及方法
31023TMC4210-I 單軸專用運動控制器
TMC262步進電機驅動控制器芯片英文手冊
2TMC4670-BI單軸伺服電機控制器芯片
兩相雙極步進電機單軸控制器/驅動器模塊TMCM-1230
TRINAMIC的六軸步進電機控制模塊TMCM-6110使用簡單記錄及使用場景
1074
TMC2041-LA雙軸步進電機驅動芯片
兩相雙極步進電機單軸控制器/驅動器模塊TMCM-1231
使用TMC5160控制器/驅動器IC讓功能更強大
12661tmc222應用電路
1577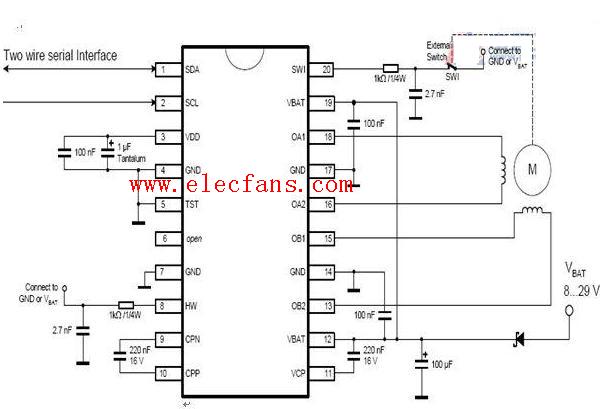
步進定位單軸定位控制實驗
32




 工商網監
工商網監
評論