 電子發(fā)燒友App
電子發(fā)燒友App


超聲波傳感器是將超聲波信號轉(zhuǎn)換成其他能量信號(通常是電信號)的傳感器。超聲波是振動頻率高于20KHz的機(jī)械波。它具有頻率高、波長短、繞射現(xiàn)象小,特別是方向性好、能夠成為射線而定向傳播等特點(diǎn)。超聲波對液體、固體的穿透本領(lǐng)很大,尤其是在陽光不透明的固體中。超聲波碰到雜質(zhì)或分界面會產(chǎn)生顯著反射形成反射成回波,碰到活動物體能產(chǎn)生多普勒效應(yīng)。超聲波傳感器廣泛應(yīng)用在工業(yè)、國防、生物醫(yī)學(xué)等方面。
超聲波傳感器測距模塊
本文所設(shè)計(jì)的超聲波傳感器主要應(yīng)用于實(shí)現(xiàn)智能小車的遮障要求,主要內(nèi)容是CD4051的簡單電路實(shí)現(xiàn)多路超聲波信號的循環(huán)發(fā)射與接收電路以及接收芯片CX20106的使用情況,最后給出了如何提高精度的方法,從而增強(qiáng)了系統(tǒng)的可靠性。
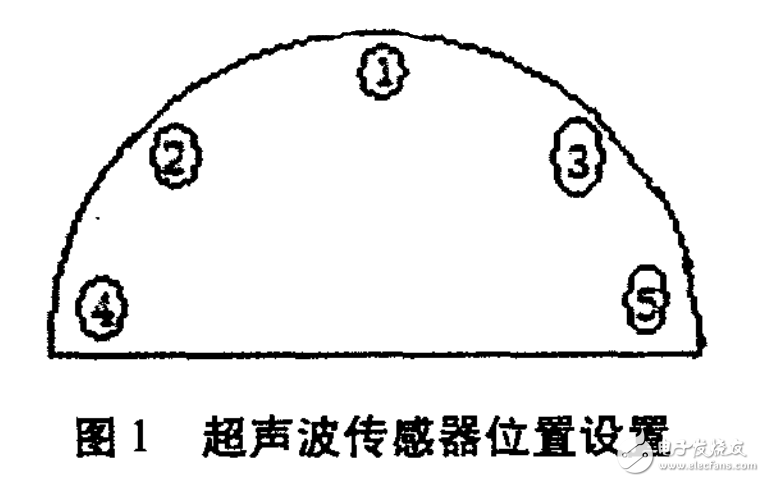
本系統(tǒng)由STC89C52單片機(jī)作為控制系統(tǒng)核心,五路超聲波傳感器分別測量小車左方、左前方、前方、右前方、右方障礙物的距離,并根據(jù)所測數(shù)據(jù)采取相應(yīng)的避障措施。超聲波傳感器位置如圖所示。
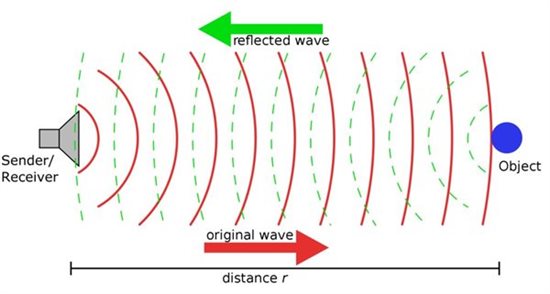
超聲傳感器的工作原理
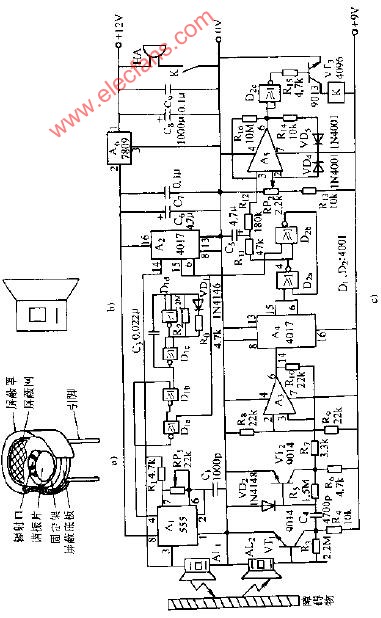
當(dāng)40KHz的脈沖電信號輸人后,由壓電陶瓷激勵器和諧振片轉(zhuǎn)換成機(jī)械振動,經(jīng)錐形輻射器將超聲振動信號向外發(fā)射出去。發(fā)射出的超聲波向空中四面八方直線傳播,遇到障礙物后它可以發(fā)生反射。接收器在收到由發(fā)射器傳來的超聲波后,使內(nèi)部的諧振片諧振,通過聲電轉(zhuǎn)換作用將聲能轉(zhuǎn)換為電脈沖信號,然后輸入信號放大器,最后驅(qū)動執(zhí)行器使電路動作。本文采用的是渡越時(shí)間法,就是通過檢測發(fā)射的超聲波與其遇到障礙物后產(chǎn)生回波之間的時(shí)間差△t,求出障礙物的距離d。計(jì)算公式為d=CAt/2,其中c=331.4,(1+T/273)^1/2為超聲波波速,T為環(huán)境攝氏溫度。在使用時(shí),如果溫度變化不大,則可認(rèn)為聲速是基本不變的;但如果測距精度要求很高,則應(yīng)通過溫度補(bǔ)償?shù)姆椒右孕U?/p>
本文采用的是TCT40—10R/T接收分體式壓電陶瓷超聲傳感器,系統(tǒng)框圖如下圖所示。
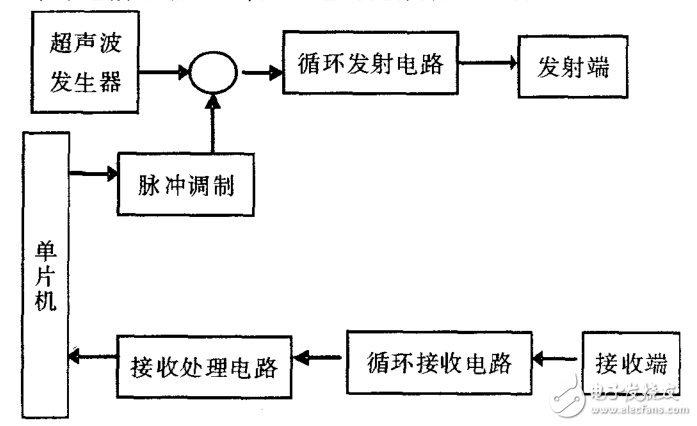
超聲波測距系統(tǒng)框圖
超聲波發(fā)生器產(chǎn)生40kHz的方波,經(jīng)脈沖調(diào)后驅(qū)動發(fā)射端的超聲波傳感器,發(fā)出同頻率的正弦波。在每個調(diào)制脈沖到來時(shí),換能器發(fā)出8一l2個周期的超聲波,同時(shí)啟動單片機(jī)的計(jì)數(shù)器定時(shí)。超聲波被測量目標(biāo)反射后由接收端的傳感器轉(zhuǎn)換為電信號,經(jīng)處理電路后產(chǎn)生中斷,同時(shí)單片機(jī)停止計(jì)數(shù),然后由計(jì)數(shù)差計(jì)算障礙物的距離。
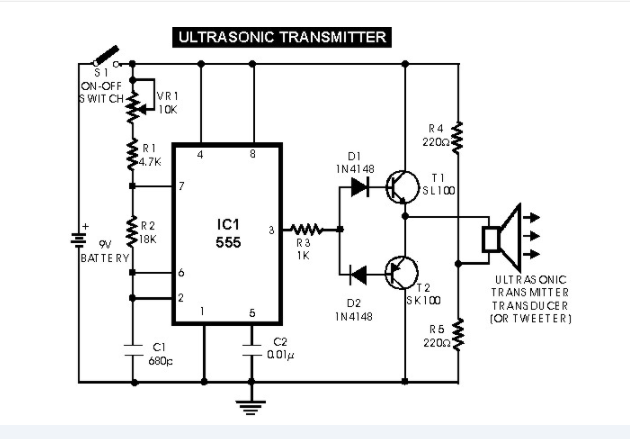
超聲波發(fā)生電路
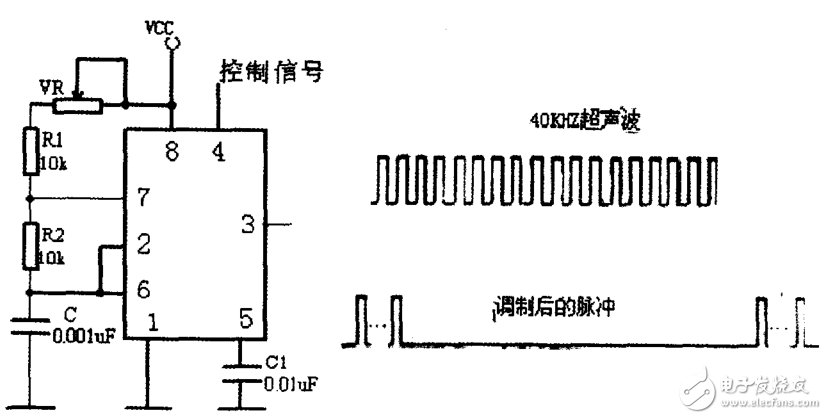
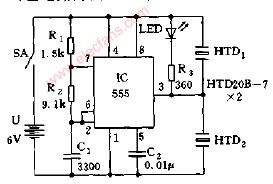
超聲波發(fā)生器及信號調(diào)制前后對比
如圖所示,根據(jù)超聲波傳感器的工作特點(diǎn),選擇NE555產(chǎn)生40K的方波,占空比為50%,電源電壓為5V。脈沖調(diào)制由單片機(jī)PI.0口控制NE555的復(fù)位(RST)引腳實(shí)現(xiàn)。P1.0=1時(shí),3腳輸出40kHz的方波,持續(xù)8—12個周期。持續(xù)周期數(shù)若太少,難以正常激勵超聲波探頭,若太多則發(fā)射波與反射波容易產(chǎn)生疊加干擾,P1.0=0時(shí),3腳無信號輸出。低電平持續(xù)時(shí)間由測量距離決定,測量距離越大,低電平持續(xù)時(shí)間越長。
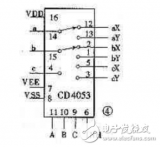
循環(huán)接收、發(fā)射電路
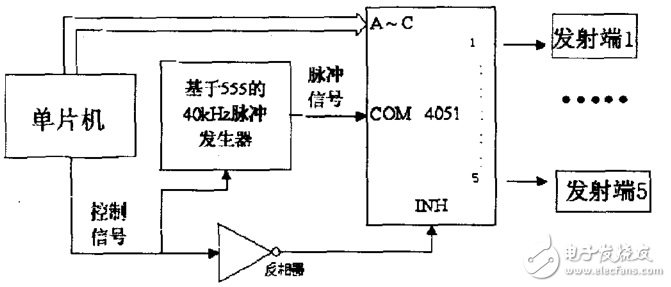
超聲波循環(huán)發(fā)射電路
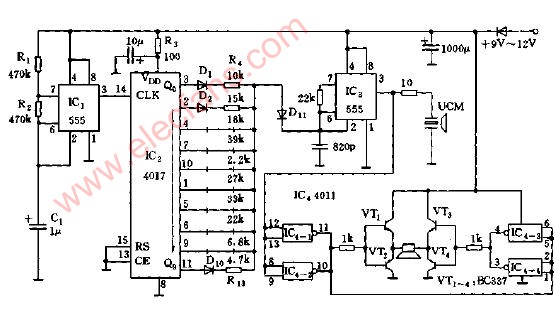
循環(huán)發(fā)射電路主要采用一個多路模擬開關(guān)CD4051進(jìn)行控制發(fā)射順序,如圖所示J。INH是控制輸入引腳,該引腳呈邏輯高電平時(shí),所有通道關(guān)閉,反之,通道開通狀態(tài)受地址選擇端A~C控制。上圖所示控制信號與超聲波發(fā)生電路中的控制信號相同,當(dāng)為邏輯高電平時(shí),NE555的3腳輸出調(diào)制信號,同時(shí)經(jīng)反相器反相后CD4051正常工作。在一路發(fā)射器發(fā)射完畢后,控制信號輸出低電平復(fù)位555,同時(shí)反相施加在4051的引腳INH上,關(guān)閉所有通道。
循環(huán)接收電路同樣采用CD4051,電路同接收電路基本相同。接收電路和發(fā)射電路采用相同的地址控制信號,即發(fā)射組正好與接收組相對應(yīng),例如1號發(fā)射傳感器與1號接收傳感器相對應(yīng)。接收端CD4051的INH引腳由單片機(jī)PI.2控制,當(dāng)一路發(fā)射器脈沖發(fā)射完畢后,經(jīng)過一定的盲區(qū)延時(shí),PI.2輸出低電平,接通相應(yīng)通道。低電平持續(xù)時(shí)間與PI.0控制信號相同,如果在控制信號低電平這段時(shí)間內(nèi)沒有檢測到回波信號,則P1.2輸出高電平禁止再接收,如果檢測到回波信號,停止計(jì)數(shù)器計(jì)數(shù),讀取計(jì)數(shù)值,進(jìn)入下一通道的發(fā)射與接收。
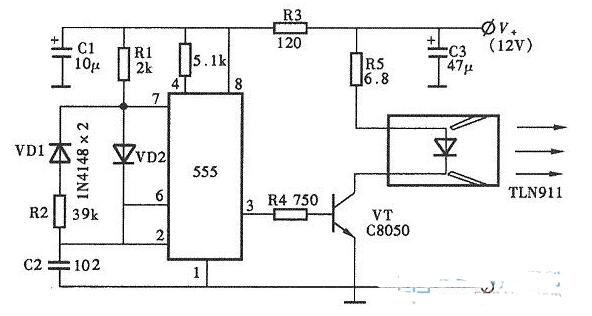
接收處理電路
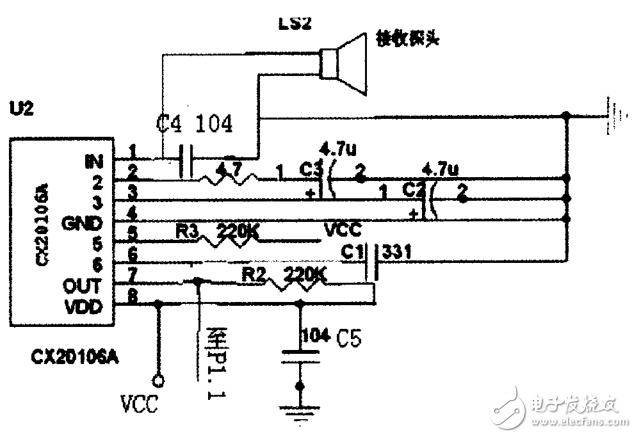
超聲波接受電路
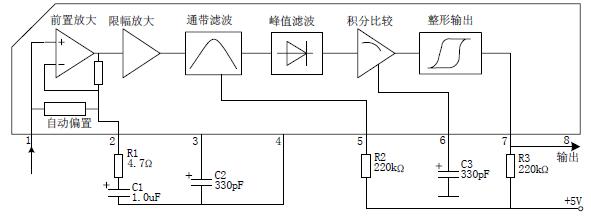
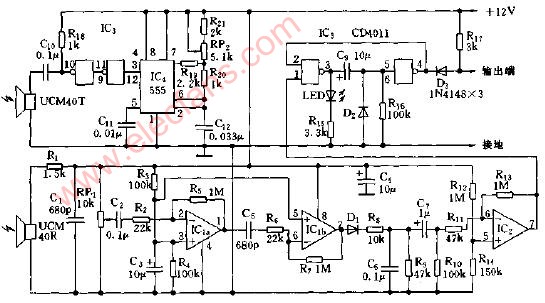
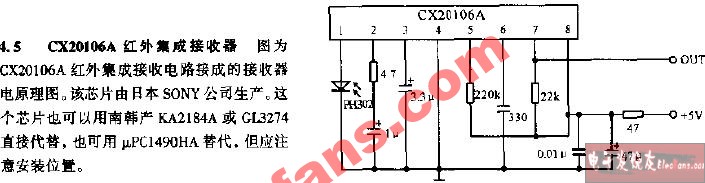
如圖所示,超聲波接收電路一般由以下幾個部分組成,前置放大、限幅放大、帶通濾波、峰值檢波、施密特整形輸出電路,為了減少干擾又有足夠的放大增益,還能大大簡化電路,使系統(tǒng)更穩(wěn)定,本文采用了紅外線接收電路的芯片CX20106。該芯片是日本索尼公司生產(chǎn)的紅外專用集成芯片,也可用于超聲波檢測。
超聲接發(fā)端接收到的信號經(jīng)電容C4耦合后輸入1端,總增益大小由2腳接收器的電阻和電容決定,通常選用參數(shù)為R1=4.7Ω,C1=1μF。3腳為檢波電容,電容量大為平均值檢波,瞬間相應(yīng)靈敏度低;若容量小,則為峰值檢波,瞬間相應(yīng)靈敏度高,但檢波輸出的脈沖寬度變動大,易造成誤動作,推薦參數(shù)為3.3μf。5腳與地之間接人一個電阻,改變阻值,可改變載波信號的接收頻率,取R=200kΩ時(shí),f0≈42kHz,若取R=220kΩ,則中心頻率f0≈38kHz。6腳為積分電容,一般取330PF,如果該電容取得太大,會使探測距離變短。7腳為輸出端,它是集電極開路輸出方式,因此該引腳必須接上一個上拉電阻到電源端,推薦阻值為22kΩ。8腳為電源。因此在允許接收的這段時(shí)間內(nèi)如果沒有檢測到回波信號,則是該端輸出為高電平,若有信號時(shí)則產(chǎn)生下降。因此利用這一特點(diǎn),將7腳輸出信號接至89C52的T2EX,當(dāng)檢測到障礙物時(shí),7腳輸出一個低脈沖,并將定時(shí)器2中的TL2和TH2當(dāng)前值各自捕獲到RCAP2L和RCAP2H中,同時(shí)引起中斷。
系統(tǒng)軟件設(shè)計(jì)
本系統(tǒng)采用STC89C52作為主控芯片,其內(nèi)部有512K的數(shù)據(jù)存儲器和8K的程序存儲器,并有-ID、T1、rI2共3個定時(shí)器可供使用。程序流程圖如圖6所示。NE555產(chǎn)生的40K方波經(jīng)過P1.0信號調(diào)制后,通過C~051選擇通道,然后驅(qū)動傳感器發(fā)出超聲波。超聲波遇到障礙物反射后,傳到超聲波接收端,這個信號經(jīng)過紅外處理芯片后送到單片機(jī)。當(dāng)c)(20lo6捕捉到40kHz的超聲波后其輸出引腳由高電平變?yōu)榈碗娖剑@個引腳上的負(fù)跳變可作中斷來引起單片機(jī)中斷。在中斷服務(wù)程序中,定時(shí)器停止計(jì)數(shù),定時(shí)器定時(shí)時(shí)間即為超聲波從發(fā)射到接收的時(shí)間差,再根據(jù)S=vV2就可以算出來測量的距離。最后單片機(jī)再根據(jù)五路傳感器所測障礙物的距離采取相應(yīng)的避障措施。
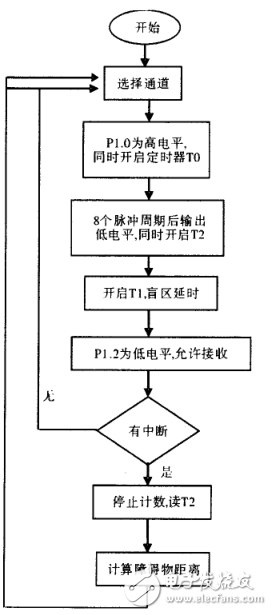
系統(tǒng)軟件框圖
誤差分析及補(bǔ)償
測距系統(tǒng)一般由超聲波發(fā)送、接收、時(shí)間計(jì)測、微機(jī)控制和計(jì)算距離五個部分組成。提高測量精度常用的措施有提高計(jì)時(shí)精度、減少時(shí)間量化誤差和補(bǔ)償溫度對傳播聲速的影響。由于本系統(tǒng)對精度要求不高,可采用單片機(jī)定時(shí)并認(rèn)為超聲波速度恒定。
總結(jié)
該系統(tǒng)設(shè)計(jì)簡單、成本低、實(shí)時(shí)性好,在室內(nèi)環(huán)境中取得了預(yù)期的實(shí)驗(yàn)結(jié)果,使智能小車無碰撞地避開障礙物。該系統(tǒng)有抗干擾能力強(qiáng)、控制過程簡單、精度高和成本低等突出的特點(diǎn),可以廣泛應(yīng)用于門禁系統(tǒng)、小區(qū)巡邏、實(shí)地勘測、智能玩具等領(lǐng)域,市場前景廣闊,具有很大經(jīng)濟(jì)效益。













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論