 電子發燒友App
電子發燒友App


小型旋翼機器人是以模型直升機為載體, 裝備上傳感器單元, 控制單元和伺服機構等裝置以實現自主飛行。而為了提高飛機的安全性, 需要設計一套設備監測系統, 實時的監測飛機的姿態信息, 機載設備的狀況以及電源的情況等。該平臺所使用的電源是兩節鋰電池串聯組成的電池組, 利用鋰離子電池的充放電特性, 設計了一套以mega16l 為核心的充放電管理系統。鋰電池具有體積小、能量密度高、無記憶效應、循環壽命高、高電壓電池和自放電率低等優點, 與鎳鎘電池、鎳氫電池不太一樣的是必須考慮充電、放電時的安全性,以防止特性劣化。因此在系統運行過程中, 為了保護鋰電池的安全, 設計了一套欠壓保護電路, 以防止電源管理系統因過用而發生電池特性和耐久性特性劣化。
電源管理系統總體框架
無人機電源管理系統是飛機實現自主飛行的重要組成部分, 其大致框架如圖1 所示。在該系統中, 利用AXI 公司生產的2212/ 34 型號發電機將動能轉換為220V 交流電, 再經過整流穩壓后輸出11.6V 的直流電壓, 可由該輸出電壓為兩節鋰電池充電。電源管理系統的控制器是meg a161單片機, 該控制器通過檢測兩節鋰電池的電壓大小從而控制繼電器開關來對電池進行充放電管理。
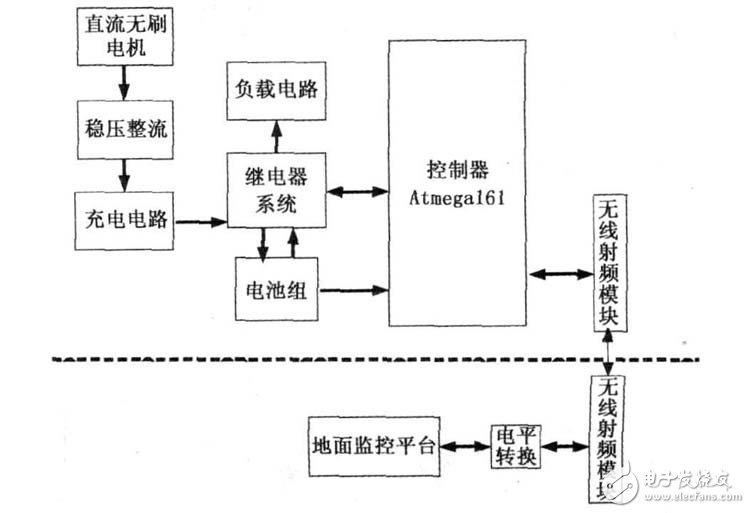
圖1 電源管理系統框架
控制器采集到電源系統中的信息后, 通過無線傳輸設備將該數據實時傳輸給地面。地面監控平臺還可以發送一些指令給mega16l, 通過控制繼電器開關來控制電池充放電, 從而實現監測和控制飛機的目的。機上電源模塊由兩節英特曼電池有限公司生產的鋰電池組成, 電池組電量充足時電壓為8?? 4V.電池的荷電量與整個供電系統的可靠性密切相關, 電池剩余電量越多, 系統的可靠性越高, 因此飛行時能實時獲得電池的剩余電量, 這將大大提高飛機的可靠性。
電源監控系統的實現
直升機能順利完成飛行任務, 充足的電源供應不可或缺,由鋰電池的特性可知, 在過度放電的情況下, 電解液因分解而導致電池特性劣化并造成充電次數降低。因此為了保護電池的安全, 電源系統在給控制系統供電前要經過欠壓保護模塊和穩壓模塊。為了預測電源系統中剩余的電量, 這里采用檢測電源系統電壓的方法, 在測得系統的電源電壓后, 查找由放電曲線建立的數據庫, 就能估計出電源系統中所剩余的電量。
單片機所需要的電源電壓是2. 7 ~ 5.5V, 因此可為meg a16l 設計外部基準電壓為2.5V, 該基準穩壓電路如圖2所示。所以系統要檢測電池的電壓, 需要將電池用電阻進行分壓且最大分得的電壓值不能超過2.5V.控制器測得的電壓值乘上電壓分壓縮小的倍數后, 就能得到電源系統中的實時電壓。時刻監測鋰電池的用電情況, 防止電池過用現象出現, 就能達到有效使用電池容量和延長壽命的目的。
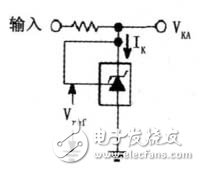
圖2 基準電壓電路
直流無刷電機電路
無刷直流電機是由電動機主體和驅動器組成, 是一種典型的機電一體化產品。直流無刷電機與一般直流電機具有相同的工作原理和應用特性, 而其組成是不一樣的, 除了電機本身外, 前者還多一個換向電路, 直流無刷電動機的電機本身是機電能量轉換部分, 它除了電機電樞、永磁勵磁兩部分外, 還帶有傳感器。該發電機的部分AC-DC 電路如圖3 所示。
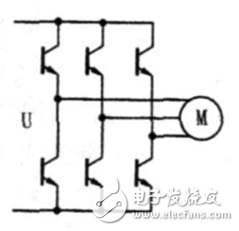
圖3 無刷電機AC-DC 電路
充電電路
鋰離子電池的充電特性和鎳鎘、鎳氫電池的充電特性有所不同, 鋰離子電池在充電時, 電池電壓緩慢上升, 充電電流逐漸減小, 當電壓達到4.2V 左右時, 電壓基本不變, 充電電流繼續減小。因此對于改型充電器可先用先恒流后恒壓充電方式進行充電, 具體充電電路如圖4 所示。該電路選用LM2575ADJ 組成斬波式開關穩壓器, 最大充電電流為1A.
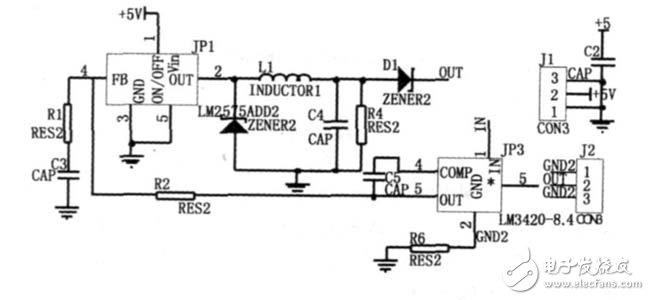
圖4 高效開關型恒流/ 恒壓充電器部分電路
該電路工作原理如下: 當電池接入充電器后, 該電路輸出恒定電流, 對電池充電。該充電器的恒流控制部分由雙運放LM358 的一半、增益設定電阻R3 和R4 、電流取樣電阻R5 和1. 23V 反饋基準電壓源組成。剛接入電池后, 運放LM358 輸出低電平, 開關穩壓器LM2575-ADJ 輸出電壓高, 電池開始充電。當充電電流上升到1A 時, 取樣電阻R5 (50m 歐) 兩端壓降達到50mV, 該電壓經過增益為25 的運放放大后, 輸出1.23V 電壓, 該電壓加到LM2575 的反饋端, 穩定反饋電路。當電池電壓達到8.4V 后, LM3420 開始控制LM2575ADJ 的反饋腳。LM3420 使充電器轉入到恒壓充電過程, 電池兩端電壓穩定在8?? 4V.R6 、R7 和C3 組成補償網絡, 保證充電器在恒流/ 恒壓狀態下穩定工作。若輸入電源電壓中斷, 二極管D2 和運放LM358 中的PNP 輸入級反向偏置, 從而使電池和充電電路隔離, 保證電池不會通過充電電路放電。當充電轉入恒壓充電狀態時, 二極管D3 反向偏置, 因此運放中不會產生灌電流。
電源欠壓保護
電源欠壓保護由鋰電池的電池放電特性易知, 當電池處于3.5V 時, 此時電池電量即將用完, 應及時給電池充電, 否則電池電壓將急劇下降直至電池損壞。于是設計了一套欠壓保護電路如圖5 所示, 利用電阻分壓所得和由TL431 設計的基準電壓比較, 將比較結果送人LM324 放大電路進而觸發由三極管構成的開關系統, 從而控制負載回路的通阻。試驗證明, 當系統電壓達到臨界危險電壓7V 時, 系統的輸出電流僅為4mA, 從而防止了系統鋰電池過度放電現象的產生。
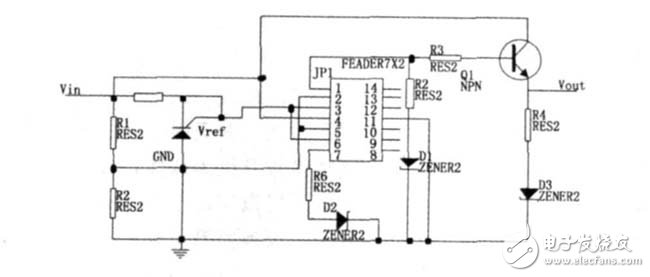
圖5 欠壓保護電路
由于鋰離子電池能量密度高, 因此難以確保電池的安全性。在過度充電狀態下, 電池溫度上升后能量將過剩, 于是電解液分解而產生氣體, 因內壓上升而發生自燃或破裂的危險;反之, 在過度放電狀態下, 電解液因分解導致電池特性及耐久性劣化, 從而降低可充電次數。該充電電路和本管理系統能有效的防治鋰電池的過充和過用, 從而確保了電池的安全, 提高鋰電池的使用壽命。
本文設計了一套UAV 電源管理系統, 該系統具有自動控制充放電管理, 實時監測電池電壓等功能。該系統已經經過調試和試驗驗證了其可行性, 但是為了保證飛機安全, 還要做更多的試驗以保證無人機自主飛行的安全和穩定。除此之外, 高低頻濾波, 電池電量預測等也是重要的方向, 需要深入的研究。現今, 鋰電池的使用范圍越來越廣, 其價格也相對適中,如果掌握先進的科學的使用方法, 讓鋰電池發揮應有的最大效用, 將會節省大量的資源和財富。
?










 工商網監
工商網監
評論