 電子發燒友App
電子發燒友App


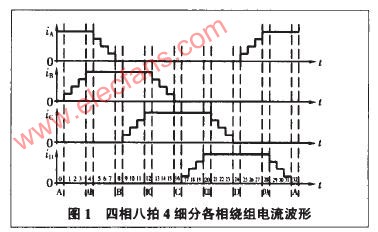
細分原理分析
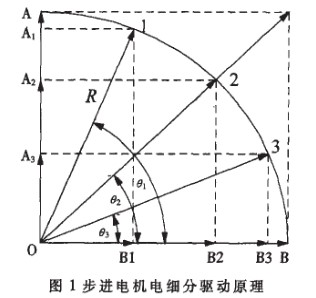
步進電機驅動線路,如果按照環形分配器決定的分配方式,控制電動機各相繞組的導通或截止,從而使電動機產生步進所需的旋轉磁勢拖動轉子步進旋轉,則步距角只有二種,即整步工作或半步工作,步距角已由電機結構所確定。如果要求步進電機有更小的步距角,更高的分辨率,或者為了電機振動、噪聲等原因,可以在每次輸入脈沖切換時,只改變相應繞組中額定的一部分,則電機的合成磁勢也只旋轉步距角的一部分,轉子的每步運行也只有步距角的一部分。這里,繞組電流不是一個方波,而是階梯波,額定電流是臺階式的投入或切除,電流分成多少個臺階,則轉子就以同樣的次數轉過一個步距角,這種將一個步距角細分成若干步的驅動方法,稱為細分驅動。在國外,對于步進系統,主要采用二相混合式步進電機及相應的細分驅動器。但在國內,廣大用戶對“細分”還不是特別了解,有的只是認為,細分是為了提高精度,其實不然,細分主要是改善電機的運行性能。由于細分驅動器要精確控制電機的相電流,所以對驅動器要有相當高的技術要求和工藝要求,成本亦會較高。

圖3 給出了三相步進電機八細分時的各相電流狀態。由于各相電流是以1P4 的步距上升或下降的,原來一步所轉過的角度θ將由八步完成,實現了步距角的八細分。由此可見,步進電機細分驅動的關鍵在于細分步進電機各相勵磁繞組中的電流。
步進電機細分驅動電路
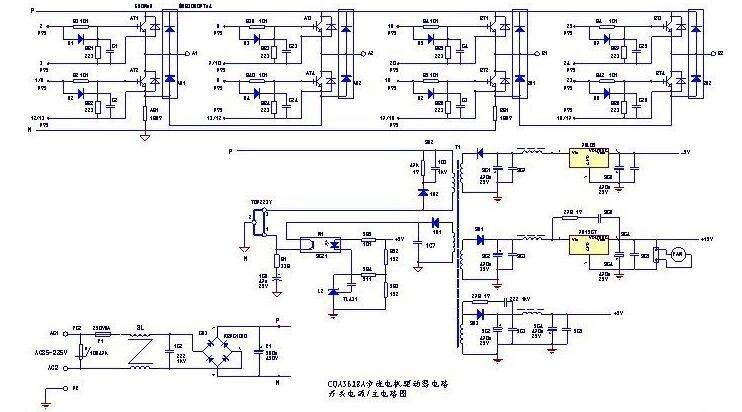
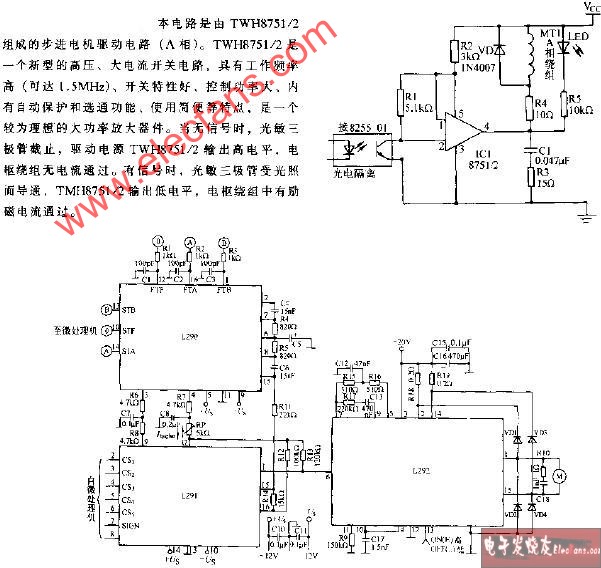
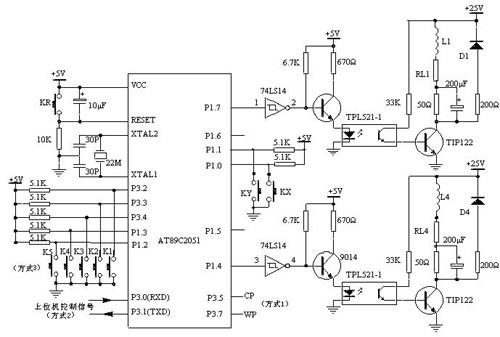
為了對步進電機的相電流進行控制,從而達到細分步進電機步距角的目的,人們曾設計了很多種步進電機的細分驅動電路。隨著微型計算機的發展,特別是單片計算機的出現,為步進電機的細分驅動帶來了便利。目前,步進電機細分驅動電路大多數都采用單片微機控制,它們的構成框圖如圖4 所示。單片機根據要求的步距角計算出各相繞組中通過的電流值,并輸出到數模轉換器(DPA) 中,由DPA 把數字量轉換為相應的模擬電壓,經過環形分配器加到各相的功放電路上,控制功放電路給各相繞組通以相應的電流,來實現步進電機的細分。單片機控制的步進電機細分驅動電路根據末級功放管的工作狀態可分為放大型和開關型兩種(見下圖5)。

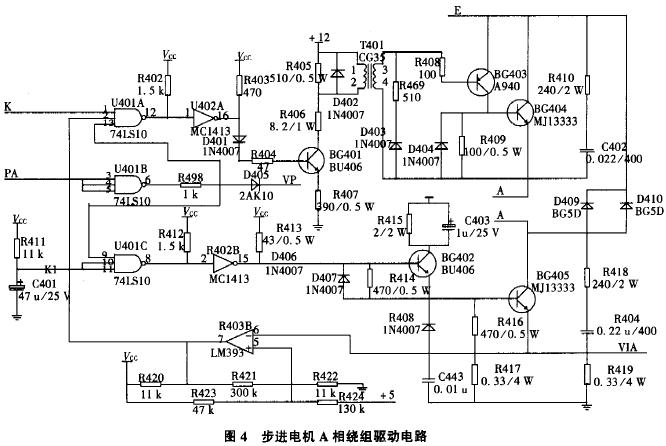
圖5 步進電機細分驅動電路
放大型步進電機細分驅動電路中末級功放管的輸出電流直接受單片機輸出的控制電壓控制,電路較簡單,電流的控制精度也較高,但是由于末級功放管工作在放大狀態,使功放管上的功耗較大,發熱嚴重,容易引起晶體管的溫漂,影響驅動電路的性能。甚至還可能由于晶體管的熱擊穿,使電路不能正常工作。因此該驅動電路一般應用于驅動電流較小、控制精度較高、散熱情況較好的場合。開關型步進電機細分驅動電路中的末級功放管工作在開關狀態,從而使得晶體管上的功耗大大降低,克服了放大型細分電路中晶體管發熱嚴重的問題。但電路較復雜,輸出的電流有一定的波紋。因此該驅動電路一般用于輸出力矩較大的步進電機的驅動。
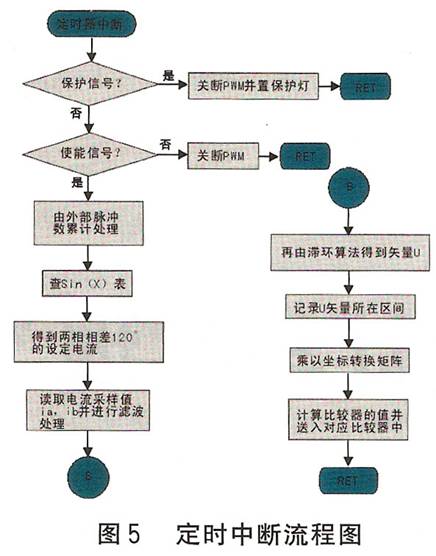
隨著大輸出力矩步進電機的發展,開關型細分驅動電路近年來得到長足的發展。目前,最常用的開關型步進電機細分驅動電路有斬波式和脈寬調制(PWM) 式兩種。斬波式細分驅動電路的基本工作原理是對電機繞組中的電流進行檢測,和DPA 輸出的控制電壓進行比較,若檢測出的電流值大于控制電壓,電路將使功放管截止,反之,使功放管導通。這樣,DPA輸出不同的控制電壓,繞組中將流過不同的電流值。脈寬調制式細分驅動電路是把DPA 輸出的控制電壓加在脈寬調制電路的輸入端,脈寬調制電路將輸入的控制電壓轉換成相應脈沖寬度的矩形波,通過對功放管通斷時間的控制,改變輸出到電機繞組上的平均電流。由于電機繞組是一個感性負載,對電流有一定的波波作用,而且脈寬調制電路的調制頻率較高,一般大于20 kHz ,因此,雖然是斷續通電,但電機繞組中的電流還是較平穩的。和斬波式細分動電路相比,脈寬調制式細分驅動電路的控制精度高,工作頻率穩定,但線路較復雜。因此,脈寬調制式細分驅動電路多用于綜合驅動性能要求較高的場合。









 工商網監
工商網監
評論