圖中每個(gè)箭頭間隔是步進(jìn)電機(jī)的一個(gè)步進(jìn)角,每輸入一個(gè)脈沖,電機(jī)就會(huì)轉(zhuǎn)動(dòng)一個(gè)步進(jìn)角,不同的電機(jī)轉(zhuǎn)動(dòng)的步進(jìn)角是不一樣的。
2023-10-09 11:49:51 84
84 
步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。由于步進(jìn)電機(jī)無(wú)需使用位置傳感器僅通過(guò)開環(huán)控制即可實(shí)現(xiàn)準(zhǔn)確的定位而被廣泛用于需要定位的設(shè)備中。步進(jìn)電機(jī)
2023-08-29 08:08:45472 
在許多領(lǐng)域都需要各種電機(jī),包括知名的步進(jìn)電機(jī)和伺服電機(jī)。但是,對(duì)于許多用戶而言,他們不了解這兩種電機(jī)的主要區(qū)別,因此他們始終不知道如何選擇。那么,步進(jìn)電機(jī)和伺服電機(jī)之間的主要區(qū)別是什么?基本結(jié)構(gòu)
2023-08-22 08:08:47757 在如今這個(gè)智能時(shí)代,步進(jìn)電機(jī)因其特有的開環(huán)位置控制性能而被廣泛應(yīng)用。各設(shè)備在步進(jìn)電機(jī)轉(zhuǎn)動(dòng)的過(guò)程中,對(duì)它輸出力矩的平滑性有一定的要求。轉(zhuǎn)動(dòng)的穩(wěn)定性除了和步進(jìn)電機(jī)的本體結(jié)構(gòu)有關(guān),也和步進(jìn)電機(jī)的控制方式
2023-08-21 11:31:17395 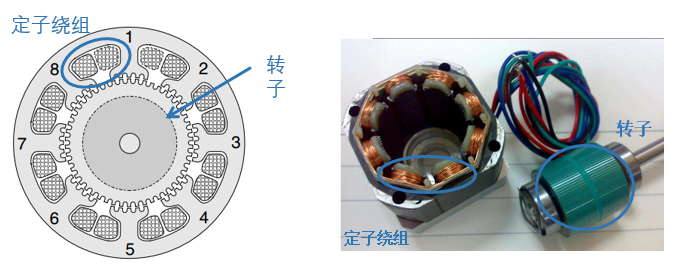
先來(lái)看一下硬件原理圖,可看到控制步進(jìn)電機(jī)的管腳分別為:GPIO6[2]、GPIO6[3]、GPIO6[4]和GPIO1[15]。使用的是一路四相五線步進(jìn)電機(jī),使用的電機(jī)驅(qū)動(dòng)芯片是L9110。
2023-08-04 14:45:41634 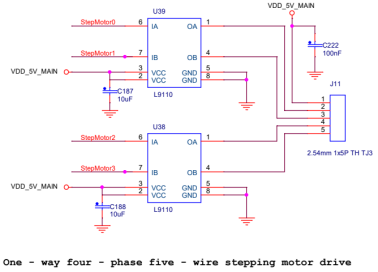
選擇步進(jìn)電機(jī)時(shí)首先要考慮各種步進(jìn)電機(jī)的優(yōu)缺點(diǎn),根據(jù)設(shè)備的具體要求選擇合適的電機(jī)。在這里先介紹不同相數(shù)的步進(jìn)電機(jī)的優(yōu)缺點(diǎn):
2023-07-21 17:27:11203 步進(jìn)電機(jī)和伺服電機(jī)的性能差異源自他們不同的電機(jī)設(shè)計(jì)方案。步進(jìn)電機(jī)的極數(shù)比伺服電機(jī)多得多,因此步進(jìn)電機(jī)旋轉(zhuǎn)一整圈,所需的繞組電流交換次數(shù)要多得多,從而導(dǎo)致在速度增加的情況下,其轉(zhuǎn)矩迅速下降。
2023-07-13 10:53:45472 
步進(jìn)伺服和步進(jìn)電機(jī)都是一種設(shè)備,但它們的工作原理和控制方式有所不同。 步進(jìn)電機(jī)是一種常見的電動(dòng)機(jī),其工作原理是通過(guò)交替通電使電機(jī)轉(zhuǎn)子按照一定的步距旋轉(zhuǎn)。步進(jìn)電機(jī)通常采用開環(huán)控制方式,即根據(jù)輸入的脈沖
2023-06-13 08:30:02259 步進(jìn)電機(jī)是一種特殊的電機(jī),它的轉(zhuǎn)動(dòng)是以固定的步進(jìn)角度為單位進(jìn)行的。步進(jìn)電機(jī)具有精度高、響應(yīng)速度快、控制方便等優(yōu)點(diǎn),因此在許多領(lǐng)域得到了廣泛的應(yīng)用。本文將介紹步進(jìn)電機(jī)的主要應(yīng)用領(lǐng)域。
2023-05-02 16:20:001564 反應(yīng)式步進(jìn)電機(jī)和永磁式步進(jìn)電機(jī)都是常見的步進(jìn)電機(jī)類型,它們的區(qū)別主要在于其工作原理和結(jié)構(gòu)。
反應(yīng)式步進(jìn)電機(jī)是利用異步電機(jī)的原理,將定子繞組分為兩個(gè)或以上繞組,同時(shí)用電子器件(如晶閘管)控制
2023-03-27 16:11:141004 步進(jìn)電機(jī)和伺服電機(jī)哪個(gè)好,這個(gè)沒有絕對(duì)的答案,適合的才是最好的!下面從步進(jìn)電機(jī)和伺服電機(jī)各種的優(yōu)缺點(diǎn)、性能特點(diǎn)
進(jìn)行分析:
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成
2023-03-23 11:07:32 4
4 步進(jìn)電機(jī)基礎(chǔ)(2.6)-直線步進(jìn)電機(jī) 前言 基本信息 公式 前言說(shuō)明 直線步進(jìn)電機(jī) 前言 基本信息 名稱 描述說(shuō)明 教材名稱 步進(jìn)電機(jī)應(yīng)用技術(shù) 作者 坂本正文 譯者 王自強(qiáng)公式 θs = 180
2023-03-23 09:30:391 在定位系統(tǒng)中,最常用的電機(jī)不外乎是步進(jìn)電機(jī)和伺服電機(jī),其中步進(jìn)電機(jī)主要可分為2相、5相、微步進(jìn)統(tǒng),伺服電機(jī)則主要分為DC伺服和AC伺服兩種。
2相、5相和微步進(jìn)系統(tǒng)主要是驅(qū)動(dòng)器所表現(xiàn)出來(lái)分辨率
2023-03-22 10:38:501 為增進(jìn)大家對(duì)步進(jìn)電機(jī)的認(rèn)識(shí),本文將對(duì)步進(jìn)電機(jī)的選型步驟以及方法予以介紹。 步進(jìn)電機(jī)是電機(jī)諸多類型中的一種,同時(shí)也是其中步進(jìn)電機(jī)應(yīng)用非常廣泛的一種。為增進(jìn)大家對(duì)步進(jìn)電機(jī)的認(rèn)識(shí),本文將對(duì)步進(jìn)電機(jī)的選型
2023-03-22 09:38:333 利用單片機(jī)實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制,編寫程序,用四路 I/O口實(shí)現(xiàn)環(huán)形脈沖的分配,控制步進(jìn)電機(jī)按固定方向連續(xù)轉(zhuǎn)
動(dòng)。同時(shí),要求按下“Positive(正轉(zhuǎn))”按鍵時(shí),控制步進(jìn)電機(jī)正轉(zhuǎn);按下
2023-03-21 15:25:243 ** 一、步進(jìn)電機(jī)簡(jiǎn)介 **步進(jìn)電動(dòng)機(jī)的定義:是一種專門用于速度和位置精確控制的特種電機(jī),它旋轉(zhuǎn)是以固定的角度(稱為步距角)一步一步運(yùn)行的,故稱步進(jìn)電機(jī)。2、步進(jìn)電動(dòng)機(jī)的機(jī)座號(hào):主要有35、39
2023-03-21 15:05:040 步進(jìn)電機(jī)原理介紹 一、步進(jìn)電機(jī)介紹 1.概念 什么是步進(jìn)電機(jī)? 優(yōu)點(diǎn) 缺點(diǎn)步進(jìn)電機(jī)的種類 反應(yīng)式VR 永磁式PM 混合式HB 二、步進(jìn)電機(jī)工作原理 物理知識(shí)重溫步進(jìn)電機(jī)結(jié)構(gòu) 勵(lì)磁順序 三、步進(jìn)電機(jī)
2023-03-21 14:32:298 步進(jìn)電機(jī)作為執(zhí)行元件,是機(jī)電一體化的關(guān)鍵產(chǎn)品之一,廣泛應(yīng)用在各種自動(dòng)化控制系統(tǒng)中。如何正確選擇步進(jìn)電機(jī),需要考慮到轉(zhuǎn)
矩、負(fù)載、電流、慣量、轉(zhuǎn)速、精度等因素,明確步進(jìn)電機(jī)的這些要素,才能選對(duì)適合應(yīng)用的步進(jìn)電機(jī)。
2023-03-21 13:57:000 什么是步進(jìn)電機(jī) 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換成相應(yīng)角位移或線位移的電動(dòng)機(jī)。每輸入一個(gè)脈沖信號(hào),轉(zhuǎn)子就轉(zhuǎn)動(dòng)一個(gè)角度或前進(jìn)一步,其輸出的角位移或線位移與輸入的脈沖數(shù)成正比,轉(zhuǎn)速和角加速度與脈沖頻率
2023-03-21 13:54:460 步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)
定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(即步進(jìn)角),多用于雕刻機(jī)、3D打印機(jī)等需要精確控制的設(shè)備
2023-03-21 11:06:461 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一- 個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)一個(gè)步距
2023-03-21 11:01:201 AccelStepper 是一款功能強(qiáng)大,簡(jiǎn)單易用的控制步進(jìn)電機(jī)的Arduino第三方庫(kù)。 目前Arduino內(nèi)置的stepper庫(kù)只能控制一臺(tái)步進(jìn)電機(jī),如果您需要控
制兩臺(tái)及以上的的步進(jìn)電機(jī)
2023-03-21 10:17:460 常見的步進(jìn)電機(jī)一般以電機(jī)端安裝尺寸區(qū)分,電機(jī)尺寸越大,長(zhǎng)度越長(zhǎng)相應(yīng)的帶載能力也就越強(qiáng)。以42步進(jìn)電機(jī)為例,參數(shù) 42表示電機(jī)端安裝尺寸為42mm×42mm。
步進(jìn)電機(jī)的關(guān)鍵指標(biāo) 1.電機(jī)型號(hào):五線
2023-03-20 14:22:272 步進(jìn)電機(jī)相比普通直流電機(jī)來(lái)說(shuō)模型結(jié)構(gòu)方面更加復(fù)雜,比如步進(jìn)電機(jī)沒有設(shè)計(jì)直流電機(jī)用于切換電流方向的換向器,這一設(shè)
計(jì)致使步進(jìn)電機(jī)轉(zhuǎn)子無(wú)法同直流電機(jī)那樣接入直流電源立馬開始運(yùn)動(dòng),這需要我們輪流控制步進(jìn)電機(jī)的多個(gè)線圈使磁場(chǎng)旋轉(zhuǎn)起
來(lái)從而驅(qū)動(dòng)電機(jī)轉(zhuǎn)子運(yùn)動(dòng)。所以控制步進(jìn)電機(jī)線圈磁場(chǎng)就是所謂的步進(jìn)電機(jī)驅(qū)動(dòng)。
2023-03-16 09:28:415 與兩相雙極步進(jìn)電機(jī)的驅(qū)動(dòng)電路相比,兩相單極步進(jìn)電機(jī)的驅(qū)動(dòng)電路在輸入段配置、內(nèi)部邏輯及控制電路和驅(qū)動(dòng)電路使用雙通道方面基本相同,但是輸出段的配置不同。兩相雙極步進(jìn)電機(jī)使用雙通道H橋來(lái)驅(qū)動(dòng),而兩相單極步進(jìn)電機(jī)則使用雙通道的2個(gè)開關(guān)(MOSFET)來(lái)驅(qū)動(dòng)。
2023-03-10 09:18:46769 
步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。由于步進(jìn)電機(jī)無(wú)需使用位置傳感器僅通過(guò)開環(huán)控制即可實(shí)現(xiàn)準(zhǔn)確的定位而被廣泛用??于需要定位的設(shè)備中。
2023-03-09 11:49:32783 
步進(jìn)電機(jī)的旋轉(zhuǎn)角度是由控制信號(hào)驅(qū)動(dòng),每個(gè)控制信號(hào)都會(huì)使步進(jìn)電機(jī)轉(zhuǎn)動(dòng)一定的角度,因此步進(jìn)電機(jī)的運(yùn)動(dòng)是“離散”的。而伺服電機(jī)則是通過(guò)控制電機(jī)的電流或電壓來(lái)控制電機(jī)的旋轉(zhuǎn)角度,因此伺服電機(jī)的運(yùn)動(dòng)是“連續(xù)”的。
2023-03-09 10:44:592659 雙極性步進(jìn)電機(jī)由兩組線圈四線組成,它不像單極性步進(jìn)電機(jī)線圈有中間抽頭。有這樣的好處是電流通過(guò)整組線圈而不是線圈的一半。這樣在同規(guī)格的步進(jìn)電機(jī),雙極性的步進(jìn)電機(jī)比單極性的步進(jìn)電機(jī)有更大的扭矩。當(dāng)然,雙極性電機(jī)就需要更復(fù)雜的控制電路來(lái)控制步進(jìn)電機(jī)。
2023-03-08 15:42:09601 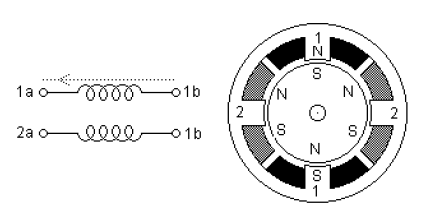
步進(jìn)電機(jī)和伺服電機(jī)是兩種常見的電機(jī)類型,它們的應(yīng)用場(chǎng)景和控制方式不同,下面是它們的區(qū)別和選型方法:
步進(jìn)電機(jī)是一種開環(huán)控制電機(jī),控制信號(hào)為脈沖信號(hào),通過(guò)控制脈沖數(shù)量和頻率來(lái)控制電機(jī)的位置和運(yùn)動(dòng)。步進(jìn)電機(jī)具有簡(jiǎn)單的控制方式、低成本和較高的精度,但通常不能提供高速運(yùn)動(dòng)和高負(fù)載扭矩。
2023-03-08 14:40:45957 步進(jìn)電機(jī)是一種特殊的電機(jī),可以通過(guò)輸入脈沖信號(hào)來(lái)控制它的位置和運(yùn)動(dòng)。步進(jìn)電機(jī)通常由電機(jī)本體和驅(qū)動(dòng)電路組成,驅(qū)動(dòng)電路負(fù)責(zé)將輸入的脈沖信號(hào)轉(zhuǎn)換為電機(jī)的運(yùn)動(dòng)控制信號(hào)。
2023-03-08 14:33:332204 步進(jìn)電機(jī)的慣量選擇需要考慮到兩個(gè)方面:
電機(jī)本身的慣量:電機(jī)的慣量越大,電機(jī)的加速和減速所需要的時(shí)間就越長(zhǎng)。因此,在選擇步進(jìn)電機(jī)時(shí),需要根據(jù)應(yīng)用需求和控制系統(tǒng)的要求綜合考慮電機(jī)的慣量
2023-03-08 14:26:402277 步進(jìn)電機(jī)是一種定角度運(yùn)轉(zhuǎn)的電動(dòng)機(jī),其作用主要是用于控制精度要求較高的定位、旋轉(zhuǎn)、平移等機(jī)械系統(tǒng)的運(yùn)動(dòng)。步進(jìn)電機(jī)通常與控制器一起使用,通過(guò)向電機(jī)提供精確的脈沖信號(hào)來(lái)控制其旋轉(zhuǎn)角度和速度。
2023-03-08 14:14:202309 步進(jìn)電機(jī)的步距角是指電機(jī)在每一步運(yùn)動(dòng)時(shí)所轉(zhuǎn)動(dòng)的角度,一般用度數(shù)(°)來(lái)表示。常見的步進(jìn)電機(jī)的步距角有1.8度、0.9度、0.45度、0.36度等。其中1.8度是最常見的步進(jìn)電機(jī)步距角,也是最為普遍的一種。
2023-03-03 11:00:274430 步進(jìn)電機(jī)是將電脈沖信號(hào),轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),又稱為脈沖電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)時(shí),它就可以驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度。
2023-03-01 09:54:492955 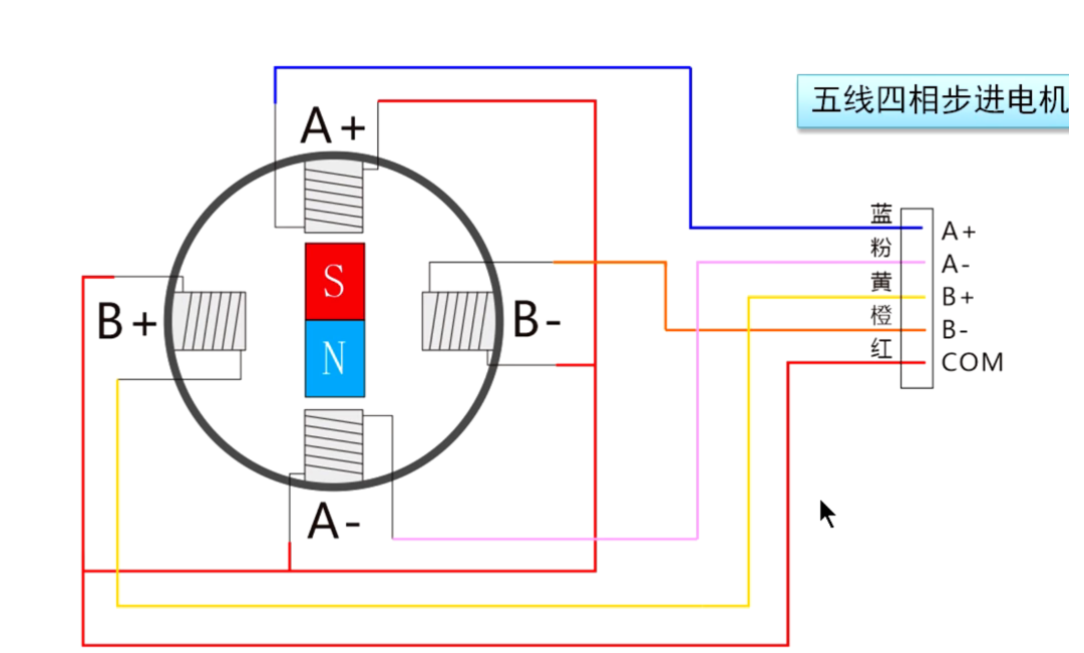
到目前為止,我們已經(jīng)介紹了步進(jìn)電機(jī)的結(jié)構(gòu)和步進(jìn)電機(jī)的驅(qū)動(dòng)方法。本文在表格中簡(jiǎn)要匯總了步進(jìn)電機(jī)的特征及步進(jìn)電機(jī)應(yīng)用。
2023-02-24 09:51:12646 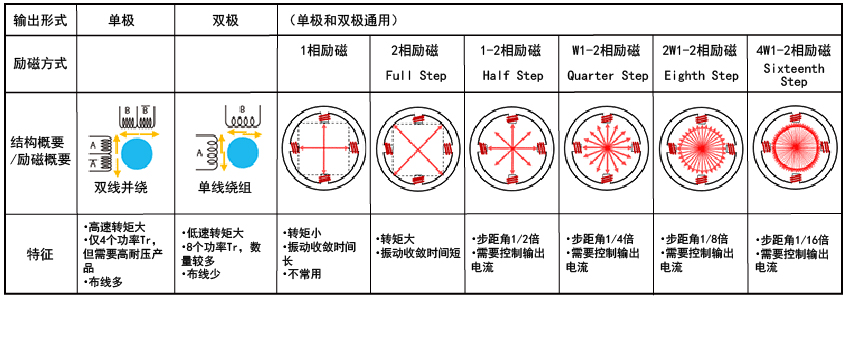
繼步進(jìn)電機(jī)的結(jié)構(gòu)之后,本文將介紹步進(jìn)電機(jī)的基本工作原理。步進(jìn)電機(jī)的基本工作原理(單相勵(lì)磁),下面使用下圖來(lái)介紹步進(jìn)電機(jī)的基本工作原理。這是上一篇“步進(jìn)電機(jī)的結(jié)構(gòu)”中給出的兩相雙極型線圈每一相(一組線圈)的勵(lì)磁示例。
2023-02-24 09:51:101610 
本文將介紹步進(jìn)電機(jī)的基本特性。步進(jìn)電機(jī)的基本特性:下圖顯示了步進(jìn)電機(jī)的轉(zhuǎn)矩和速度之間的關(guān)系。縱軸為轉(zhuǎn)矩,橫軸為脈沖頻率。
2023-02-24 09:51:10717 
在新開始的“步進(jìn)電機(jī)”篇系列文章中,將介紹步進(jìn)電機(jī)的結(jié)構(gòu)、步進(jìn)電機(jī)的工作原理、步進(jìn)電機(jī)的特性和步進(jìn)電機(jī)的驅(qū)動(dòng)方法。什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。
2023-02-24 09:51:091314 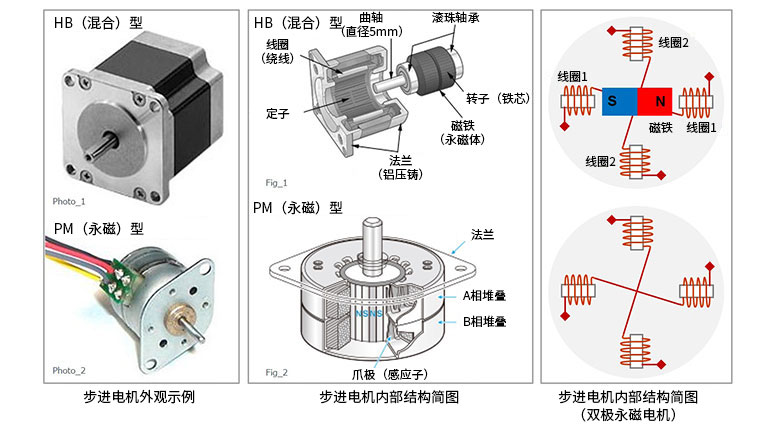
步進(jìn)電機(jī),很多人DIY激光雕刻機(jī),3D打印機(jī)的時(shí)候都會(huì)用到。那么他與普通的直流電機(jī)有什么不同呢?步進(jìn)電機(jī)在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化
2016-01-13 17:15:16
這是一個(gè)基于步進(jìn)電機(jī) 28BYJ48 的旋轉(zhuǎn)平臺(tái),通過(guò) X113647 步進(jìn)電機(jī)驅(qū)動(dòng)器通過(guò)串行對(duì)話進(jìn)行控制。
2022-12-08 11:21:110 步進(jìn)電機(jī)是一種直接將電脈沖轉(zhuǎn)化為機(jī)械運(yùn)動(dòng)的機(jī)電裝置, 通過(guò)控制施加在電機(jī)線圈上的電脈沖順序、 頻率和數(shù)量, 可以實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的轉(zhuǎn)向、 速度和旋轉(zhuǎn)角度的控制。
2022-12-07 10:43:104120 之前小白白寫過(guò)一篇步進(jìn)電機(jī)驅(qū)動(dòng)基礎(chǔ),講了最基本的步進(jìn)電機(jī)驅(qū)動(dòng)方法。
2022-10-19 15:50:571395 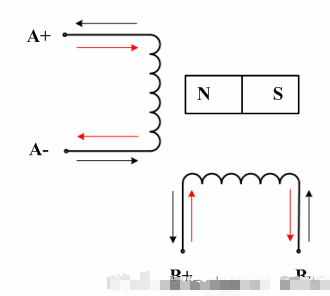
主動(dòng)式線性唱臂的機(jī)電組件,即小型步進(jìn)電機(jī),會(huì)直接在唱臂的固定裝置上產(chǎn)生振動(dòng),然后傳遞到唱頭殼和唱針。這種振動(dòng)會(huì)增加噪音,使頭罩震動(dòng),并降低音頻信號(hào)的質(zhì)量。那么,當(dāng)使用步進(jìn)電機(jī)時(shí),這些額外的振動(dòng)及噪音
2022-04-24 17:09:355054 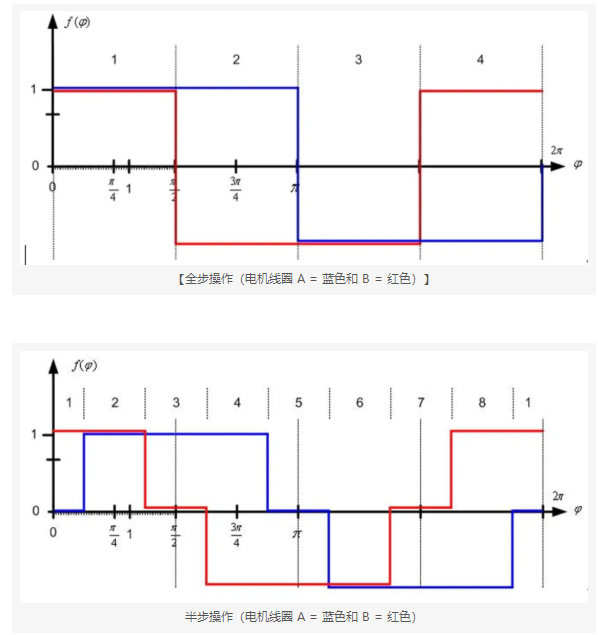
步進(jìn)電機(jī)是什么?步進(jìn)電機(jī)不轉(zhuǎn)怎么辦?小編教你解決步進(jìn)電機(jī)不轉(zhuǎn)問題 日常生活中電機(jī)大家肯定都聽說(shuō)過(guò),但是步進(jìn)電機(jī)或許就會(huì)有些陌生了,步進(jìn)電機(jī)在一些領(lǐng)域起著相當(dāng)大的作用,但是步進(jìn)電機(jī)不轉(zhuǎn)的情況時(shí)有出現(xiàn)
2022-04-14 10:51:3514406 1 步進(jìn)電機(jī)原理1.1 步進(jìn)電機(jī)簡(jiǎn)介步進(jìn)電機(jī)是將輸入的電脈沖信號(hào)轉(zhuǎn)換為角位移或線位移的元件。在不超負(fù)載運(yùn)作的情況下,電機(jī)的轉(zhuǎn)速以及停止的位置只取決于脈沖的個(gè)數(shù)和脈沖的頻率。脈沖數(shù)越多,電機(jī)的角位移
2022-01-17 10:32:256 文章目錄1 簡(jiǎn)介2 步進(jìn)電機(jī)介紹3 A4988驅(qū)動(dòng)介紹4 電機(jī)啟動(dòng)代碼5 最后1 簡(jiǎn)介Hi,大家好,這里是丹成學(xué)長(zhǎng),今天向大家介紹如何使用單片機(jī)控制步進(jìn)電機(jī)大家可用于 課程設(shè)計(jì) 或 畢業(yè)設(shè)計(jì)技術(shù)解答
2021-12-20 18:47:2015 一、設(shè)計(jì)目的分析步進(jìn)電機(jī)的驅(qū)動(dòng)原理,將單片機(jī)應(yīng)用于步進(jìn)電機(jī)的控制接口設(shè)計(jì);利用中斷定時(shí)方法,實(shí)現(xiàn)步進(jìn)電機(jī)的位置控制、方向控制和速度控制。利用ZLG7290鍵盤/顯示電路,設(shè)置給定信號(hào),并顯示實(shí)際信息
2021-11-23 17:21:3522 簡(jiǎn)介:用單片機(jī)控制步進(jìn)電機(jī)正轉(zhuǎn) 反轉(zhuǎn) 加速 減速;由LCD1602實(shí)時(shí)顯示步進(jìn)電機(jī)的狀態(tài);F-正轉(zhuǎn),B-反轉(zhuǎn);數(shù)字越大,轉(zhuǎn)速越大;仿真原理圖如下:MCU和LCD1602顯示模塊:ULN2803驅(qū)動(dòng)
2021-11-10 19:51:0111 步進(jìn)電機(jī)主要是依相數(shù)來(lái)做分類的,通常我們常見的有四相、二相、三相等幾類。 ? ? ? ? ?二相步進(jìn)電機(jī)與三相步進(jìn)電機(jī)的區(qū)別: 電機(jī)的相數(shù) 是指電機(jī)內(nèi)部的線圈數(shù)不同,二相步進(jìn)電機(jī)電機(jī)內(nèi)部是由2個(gè)線圈
2021-08-03 14:12:5015064 從步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)原理可以得出,要使步進(jìn)電機(jī)正常運(yùn)行,必須按規(guī)律控制步進(jìn)電機(jī)的每一相繞組得電。
2021-07-16 11:46:444971 
步進(jìn)電機(jī)是電機(jī)中使用廣泛的一類,在電機(jī)市場(chǎng)步進(jìn)電機(jī)的運(yùn)用也是分類而行。步進(jìn)電機(jī)按照內(nèi)在的運(yùn)動(dòng)不同分為直線步進(jìn)電機(jī)。直線步進(jìn)電機(jī)的運(yùn)行原理與構(gòu)成是否與名字一樣是直線的呢?
2021-02-12 16:55:005019 步進(jìn)電機(jī)從其結(jié)構(gòu)形式上可分為反應(yīng)式步進(jìn)電機(jī)、永磁式步進(jìn)電機(jī)、混合式步進(jìn)電機(jī)、單相步進(jìn)電機(jī)、平面步進(jìn)電機(jī)等多種類型。
2020-12-26 08:30:352885 步進(jìn)電機(jī)和伺服電機(jī)在工業(yè)傳動(dòng)控制領(lǐng)域都是重要的控制部件,應(yīng)用面廣泛。但是步進(jìn)電機(jī)和伺服電機(jī)有什么不同呢?
2020-12-14 21:28:35766 步進(jìn)電機(jī)在多高的溫度下能夠正常工作? 永坤品牌的高低溫步進(jìn)電機(jī)簡(jiǎn)介: 電機(jī)的阻燃等級(jí)指其所用絕緣層材料的耐高溫級(jí)別,分A、E、B、F、H級(jí).容許升溫就是指電機(jī)的溫度與周邊操作溫度對(duì)比上升的程度
2020-09-25 11:58:242599 SM35778 三相步進(jìn)電機(jī)
步距角:1.2°、保持轉(zhuǎn)矩:1.50N.m、額定電流:5.8A/Phase
型號(hào) SM35778
2019-12-30 10:33:321166 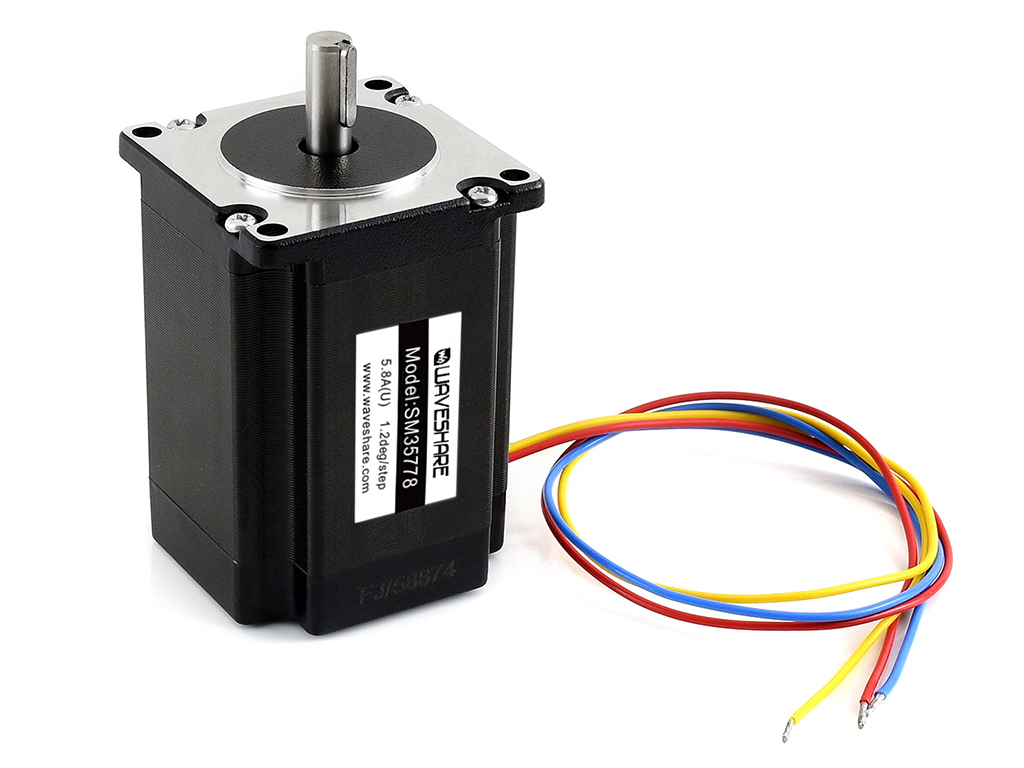
SM25776 兩相步進(jìn)電機(jī)
步距角:1.8°、保持轉(zhuǎn)矩:1.90N.m、額定電流:3.0A/Phase
型號(hào) SM25776
2019-12-30 10:32:161348 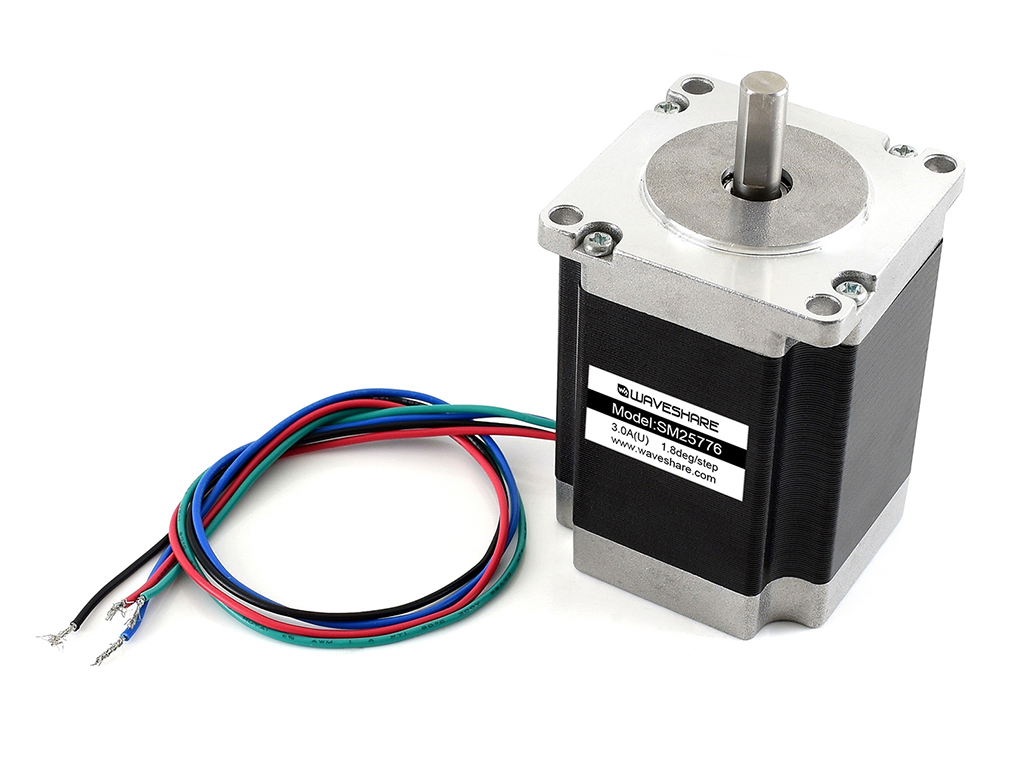
PmodSTEP通過(guò)ST L293DD為步進(jìn)電機(jī)提供了一個(gè)四通道驅(qū)動(dòng)。
2019-11-28 14:18:191000 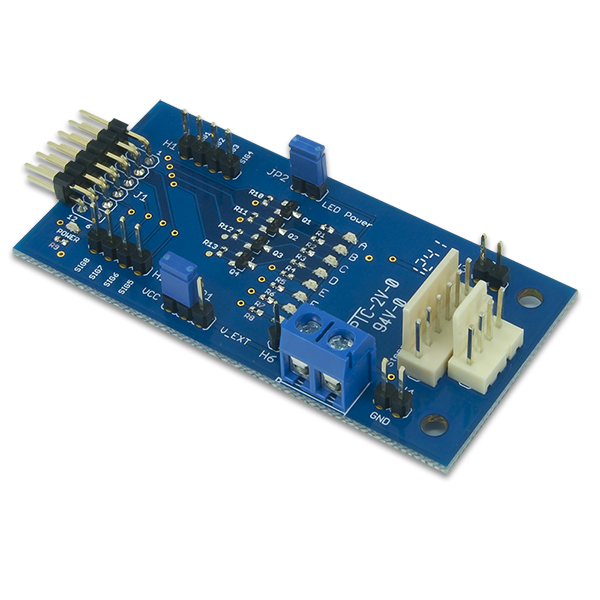
POWERMAX P 和 M 系列步進(jìn)電機(jī)為NEMA 23 (60 mm) 步進(jìn)電機(jī)設(shè)定標(biāo)準(zhǔn)值。 可提供半疊片、單疊片和雙疊片配置,保持轉(zhuǎn)矩從42至253 oz-in。 M系列電機(jī)采用SIGMAX?技術(shù),以獲得更高的轉(zhuǎn)矩和加速度。
2019-10-29 08:00:0011 POWERPAC? N3、N4、K3和K4系列混合步進(jìn)電機(jī)以較小的封裝形式提供了更高的動(dòng)力。 這些可靠的NEMA 34 和 42 (90 and 110 mm) 框架電機(jī)提供了行業(yè)內(nèi)最高的轉(zhuǎn)矩密度
2019-10-29 08:00:005 CT系列步進(jìn)電機(jī)集成了創(chuàng)新的散熱技術(shù)、高轉(zhuǎn)矩磁設(shè)計(jì)、可靠的軸承以及高壓絕緣系統(tǒng)。這些特點(diǎn)構(gòu)成了支持大型機(jī)械負(fù)載并可以與所有驅(qū)動(dòng)器使用的高轉(zhuǎn)矩步進(jìn)電機(jī)。 CT系列產(chǎn)品步進(jìn)具有優(yōu)秀的性能,還采用最流行的規(guī)格(17、23),并提供多種長(zhǎng)度、繞組和軸。
2019-10-28 08:00:003 1. 步進(jìn)電機(jī)簡(jiǎn)介:在工業(yè)控制系統(tǒng)中,通常要控制機(jī)械部件的平移和轉(zhuǎn)動(dòng),這些機(jī)械部件的驅(qū)動(dòng)大都采用交流電機(jī)、直流電機(jī)和步進(jìn)電機(jī)。其中,步進(jìn)電機(jī)最適合數(shù)字控制,因此它在數(shù)控機(jī)床,家用電器等中得到廣泛應(yīng)用。
2019-08-09 17:33:008 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就
2019-07-31 17:35:0015 在相同電流且相同轉(zhuǎn)矩輸出的條件下,單極型步進(jìn)電機(jī)比雙極型步進(jìn)電機(jī)多一倍的線圈,成本更高,控制電路的結(jié)構(gòu)也不一樣,目前市場(chǎng)上流行的大多是雙極型步進(jìn)電機(jī)。
2018-07-17 18:34:0335873 
本文開始介紹了步進(jìn)電機(jī)的基本原理,其次介紹了步進(jìn)電機(jī)工作效率以及使步進(jìn)電機(jī)的效率最大化的方法,最后介紹了步進(jìn)電機(jī)選型的步驟與方法。
2018-04-25 14:06:014084 
步進(jìn)電機(jī)作為執(zhí)行元件,是機(jī)電一體化的關(guān)鍵產(chǎn)品之一,廣泛應(yīng)用在各種自動(dòng)化設(shè)備中。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向
2018-04-25 10:59:1115422 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主要執(zhí)行元件,應(yīng)用極為廣泛。。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載
2018-02-07 15:41:3520 步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器。
2017-06-11 11:34:2931023 該步進(jìn)電機(jī)為一四相步進(jìn)電機(jī),采用單極性直流電源供電。只要對(duì)步進(jìn)電機(jī)的各相繞組按合適的時(shí)序通電,就能使步進(jìn)電機(jī)步進(jìn)轉(zhuǎn)動(dòng)。
2016-07-01 15:43:5984 驅(qū)動(dòng)電路,關(guān)于步進(jìn)電機(jī)部分,主要針對(duì)如何設(shè)置步進(jìn)電機(jī)的參數(shù)。
2016-03-14 09:52:1920 步進(jìn)電機(jī)控制,基于C51的步進(jìn)電機(jī)控制,快來(lái)下載學(xué)習(xí)吧
2016-01-13 14:12:0750 步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng)
2015-11-02 18:07:0152 步進(jìn)電機(jī)的保持轉(zhuǎn)矩,近似于傳統(tǒng)電機(jī)所稱的“功率”。當(dāng)然,有著本質(zhì)的區(qū)別。步進(jìn)電機(jī)的物理結(jié)構(gòu),完全不同于交流、直流電機(jī),步進(jìn)電機(jī)的輸出功率是可變的。
2010-06-12 08:19:26955 步進(jìn)電機(jī)的參數(shù)
電機(jī)固有步距角:它表示控制系統(tǒng)每發(fā)一個(gè)步進(jìn)脈沖信號(hào),電機(jī)所轉(zhuǎn)動(dòng)的角度。
步進(jìn)電機(jī)
2010-02-25 17:40:235081 步進(jìn)電機(jī)和伺服電機(jī) 步進(jìn)電機(jī)是一種離散運(yùn)動(dòng)的裝置,它和現(xiàn)代數(shù)字控制技術(shù)有著本質(zhì)的聯(lián)系。在目前國(guó)內(nèi)的數(shù)字控制系統(tǒng)中,步進(jìn)電
2010-01-11 08:39:21919 步進(jìn)電機(jī)的應(yīng)用
(一)步進(jìn)電機(jī)的選擇步進(jìn)電機(jī)有步距角(涉及到相數(shù)
2010-01-09 15:11:263887 什么是步進(jìn)電機(jī)?
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)
2010-01-09 14:18:231548 用MCP定時(shí)器控制步進(jìn)電機(jī):步進(jìn)電機(jī)簡(jiǎn)介1.1.1 步進(jìn)電機(jī)步進(jìn)電機(jī)和普通電動(dòng)機(jī)不同之處是步進(jìn)電機(jī)接受脈沖信號(hào)的控制。步進(jìn)電機(jī)靠一種叫環(huán)形分配器的電子開關(guān)器件,通過(guò)功
2009-09-19 11:36:3222 步進(jìn)電機(jī)是什么意思
什么是步進(jìn)電機(jī)步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接
2009-06-28 10:50:158601 步進(jìn)電機(jī)的結(jié)構(gòu)
目前,我國(guó)使用的步進(jìn)電機(jī)多為反應(yīng)式步進(jìn)電機(jī)。在反應(yīng)式步進(jìn)電機(jī)中,有軸向分相和徑向分相兩種,如表5--1所述。
2009-05-06 23:37:409366 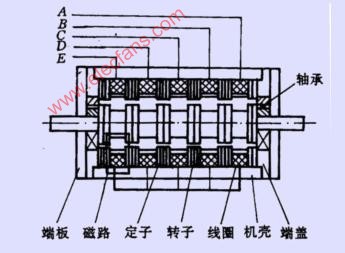
步進(jìn)電機(jī)的工作原理
以磁阻式步進(jìn)電機(jī)為例,介紹一下步進(jìn)電機(jī)的工作原理,圖1. 1是磁阻式步進(jìn)電機(jī)工作原理的示意圖。它的定子上有六個(gè)
2009-03-30 16:53:048215 
步進(jìn)電機(jī)控制實(shí)驗(yàn)
一.實(shí)驗(yàn)?zāi)康牧私?b style="color: red">步進(jìn)電機(jī)的工作原理,
2008-09-22 17:53:013226 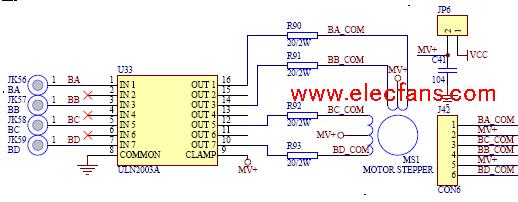
1.什么是步進(jìn)電機(jī)? 步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器
2006-04-16 23:19:051374
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論