 電子發(fā)燒友App
電子發(fā)燒友App


L298N的介紹:
L298是SGS(通標(biāo)標(biāo)準(zhǔn)技術(shù)服務(wù)有限公司)公司的品,比較常見的是15腳Multiwatt封裝的L298N,內(nèi)部包含4通道邏輯驅(qū)動(dòng)電路。是一種二相和四相電機(jī)的專用驅(qū)動(dòng)器,即內(nèi)含二個(gè)H橋的高電壓大電流雙全橋驅(qū)動(dòng)器,接收標(biāo)準(zhǔn)TTL邏輯電平信號(hào),可驅(qū)動(dòng)46V、2A 以下的電機(jī)。
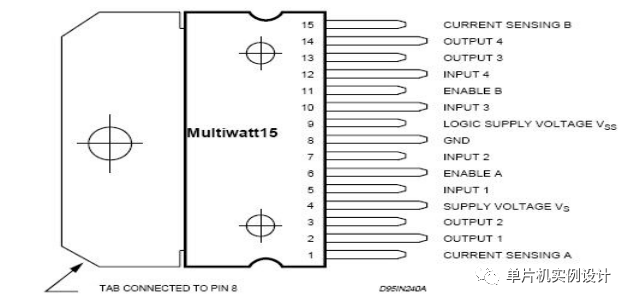
L298N引腳排列:
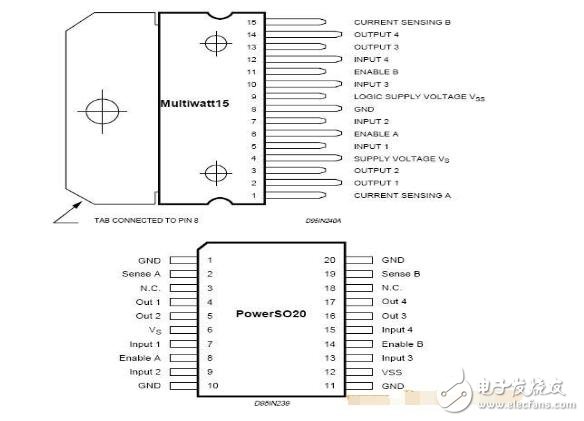
L298N的引腳9為LOGIC SUPPLY VOLTAGE Vss,即邏輯供應(yīng)電壓。引腳4為SUPPLY VOLTAGE Vs,即驅(qū)動(dòng)部分輸入電壓。Vss電壓要求輸入最小電壓為4.5V,最大可達(dá)36V;Vs電壓最大值也是36V,但經(jīng)過我的實(shí)驗(yàn),Vs電壓應(yīng)該比Vss電壓高,否則有時(shí)會(huì)出現(xiàn)失控現(xiàn)象。 它的引腳2,3,13,14為L298N芯片輸入到電動(dòng)機(jī)的輸出端,其中引腳2和3能控制兩相電機(jī),對(duì)于直流電動(dòng)機(jī),即可控制一個(gè)電動(dòng)機(jī)。同理,引腳13和14 也可控制一個(gè)直流電動(dòng)機(jī)。引腳6和11腳為電動(dòng)機(jī)的使能接線腳。引腳5,7,10,12為單片機(jī)輸入到L298N芯片的輸入引腳。
L298N參數(shù)介紹:
(1) 邏輯部分輸入電壓:6~7V
(2) 驅(qū)動(dòng)部分輸入電壓Vs:4.8~46V
(3) 邏輯部分工作電流Iss:≤36mA
(4) 驅(qū)動(dòng)部分工作電流Io:≤2A
(5) 最大耗散功率:25W(T=75℃)
(6) 控制信號(hào)輸入電平:高電平:2.3V≤Vin≤Vs低電平:-0.3V≤Vin≤1.5V
(7) 工作溫度:-25℃~+130℃
(8) 驅(qū)動(dòng)形式:雙路大功率H橋驅(qū)動(dòng)
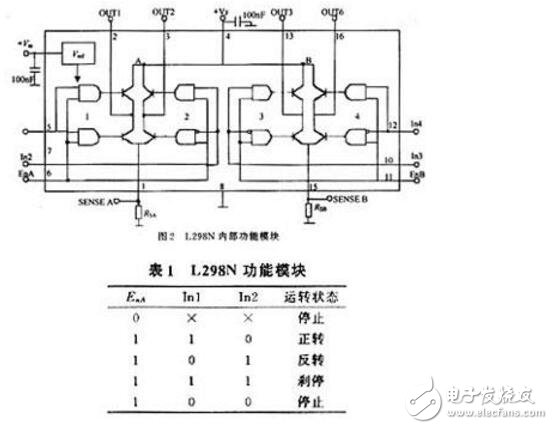
l298n功能模塊
直流電機(jī)轉(zhuǎn)速的PWM控制工作原理
1、直流電機(jī)
直流電機(jī)的結(jié)構(gòu)由定子和轉(zhuǎn)子兩大部分組成。直流電機(jī)運(yùn)行時(shí)靜止不動(dòng)的部分稱為定子,定子的主要作用是產(chǎn)生磁場(chǎng),磁場(chǎng)由機(jī)座、主磁極、換向極、端蓋、軸承和電刷裝置等組成。運(yùn)行時(shí)轉(zhuǎn)動(dòng)的部分稱為轉(zhuǎn)子,其主要作用產(chǎn)生電磁轉(zhuǎn)矩和感應(yīng)電動(dòng)勢(shì),是直流電機(jī)進(jìn)行能量轉(zhuǎn)換的樞紐,所以通常又稱為電樞,由轉(zhuǎn)軸、電樞鐵心、電樞繞組、換向器和風(fēng)扇等組成。
導(dǎo)體受力的方向用左手定則確定。這一對(duì)電磁力形成了作用于電樞的一個(gè)力矩,這個(gè)力矩在旋轉(zhuǎn)電機(jī)里稱為電磁轉(zhuǎn)矩,轉(zhuǎn)矩的方向是逆時(shí)針方向,企圖使電樞逆時(shí)針方向轉(zhuǎn)動(dòng)。如果此電磁轉(zhuǎn)矩能夠克服電樞上的阻轉(zhuǎn)矩(例如由摩擦引起的阻轉(zhuǎn)矩以及其它負(fù)載轉(zhuǎn)矩),電樞就能按逆時(shí)針方向旋轉(zhuǎn)起來。
當(dāng)電樞轉(zhuǎn)了180°后,導(dǎo)體cd邊轉(zhuǎn)到N極下,導(dǎo)體ab邊轉(zhuǎn)到S極下時(shí),由于直流電源供給的電流方向不變,仍從電刷A流入,經(jīng)過導(dǎo)體cd、ab后,從電刷B流出。這時(shí)導(dǎo)體cd邊受力方向變?yōu)閺挠蚁蜃螅瑢?dǎo)體ab邊受力方向是從左向右,產(chǎn)生的電磁轉(zhuǎn)矩的方向仍為逆時(shí)針方向。
因此,電樞一經(jīng)轉(zhuǎn)動(dòng),由于換向器配合電刷對(duì)電流的換向作用,直流電流交替地由導(dǎo)體ab和cd流入,使線圈邊只要處于N極下,其中通過電流的方向總是由電刷A流入的方向,而在S極下時(shí),總是從電刷B流出的方向。這就保證了每個(gè)極下線圈邊中的電流始終是一個(gè)方向,從而形成一種方向不變的轉(zhuǎn)矩,使電動(dòng)機(jī)能連續(xù)地旋轉(zhuǎn)。這就是直流電動(dòng)機(jī)的工作原理。
2直流電機(jī)驅(qū)動(dòng)
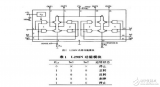
L298N可接受標(biāo)準(zhǔn)TTL邏輯電平信號(hào)VSS,VSS可接4.5~7 V電壓。4腳VS接電源電壓,VS電壓范圍VIH為+2.5~46 V。輸出電流可達(dá)2.5 A,可驅(qū)動(dòng)電感性負(fù)載。1腳和15腳下管的發(fā)射極分別單獨(dú)引出以便接入電流采樣電阻,形成電流傳感信號(hào)。L298可驅(qū)動(dòng)2個(gè)電動(dòng)機(jī),OUT1,OUT2和OUT3,OUT4之間可分別接電動(dòng)機(jī),本實(shí)驗(yàn)裝置我們選用驅(qū)動(dòng)一臺(tái)電動(dòng)機(jī)。5,7,10,12腳接輸入控制電平,控制電機(jī)的正反轉(zhuǎn)。EnA,EnB接控制使能端,控制電機(jī)的停轉(zhuǎn)。表1是L298N功能邏輯圖。In3,In4的邏輯圖與表1相同。由表1可知EnA為低電平時(shí),輸入電平對(duì)電機(jī)控制起作用,當(dāng)EnA為高電平,輸入電平為一高一低,電機(jī)正或反轉(zhuǎn)。同為低電平電機(jī)停止,同為高電平電機(jī)剎停。
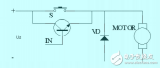
l298n怎么用pwm波控制轉(zhuǎn)速?
IN1=1,IN2=0正轉(zhuǎn),則可以將IN2對(duì)應(yīng)的PWM占空比設(shè)為0,若IN2所連單片機(jī)引腳可以設(shè)為普通I/O引腳的話,則可設(shè)為此項(xiàng),并設(shè)輸出為0也可。具體的根據(jù)實(shí)際情況吧。然后就設(shè)置IN1腳所對(duì)應(yīng)的PWM了,其通過改變占空比的大小來進(jìn)行調(diào)壓的,這樣就能控制電機(jī)的轉(zhuǎn)速了。當(dāng)然你的占空比若是過小的話,這樣對(duì)應(yīng)的電壓輸出很小,電機(jī)可能會(huì)不轉(zhuǎn)。










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論