以串級調(diào)節(jié)系統(tǒng)為例來說明復(fù)雜調(diào)節(jié)系統(tǒng)的參數(shù)整定方法。由于串級調(diào)節(jié)系統(tǒng)中,有主、副兩組參數(shù),各通道及回路間存在著相互聯(lián)系和影響。改變主、副回路的任一參數(shù),對整個系統(tǒng)都有影響。特別是主、副對象時間常數(shù)相差不大時,動態(tài)聯(lián)系密切,整定參數(shù)的工作尤其困難。
2023-09-21 09:43:27 156
156 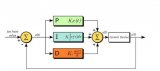
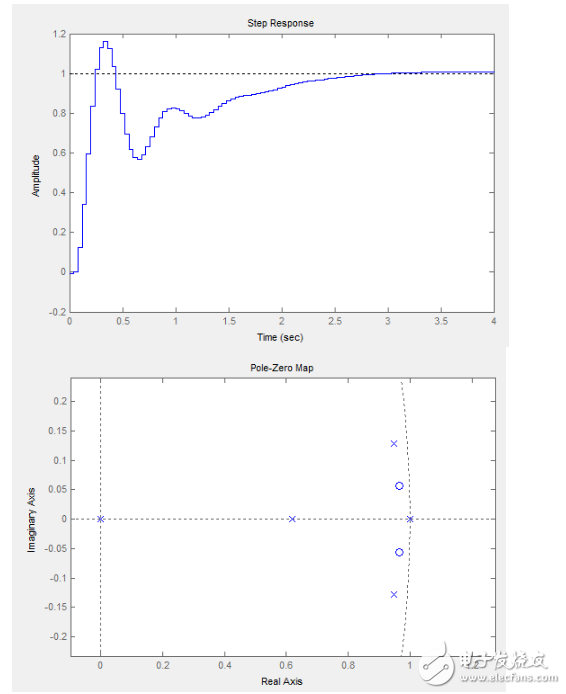
9.永磁同步電機的矢量控制策略(九)永磁同步電機的矢量控制策略 9.永磁同步電機的矢量控制策略(九) 9.1針對傳遞函數(shù)的PID參數(shù)自整定 9.2永磁同步電機的矢量PID控制參數(shù)自整定 9.3雙閉環(huán)
2023-03-15 09:38:23 3
3 FB58脈沖功能 自整定參數(shù)的保存(SAVE_PAR)/重載(UNDO_PAR) 表1. 自整定參數(shù)的保存與重載 MAN_ON SAVE_PAR UNDO_PAR 狀態(tài) 1 1 0 將當前參數(shù)保存至
2022-10-17 10:58:10686 小弟試過了用labview里的pid例程里的Plant作為被控對象,但是自整定不成功,求高手幫忙,謝謝
2012-04-25 09:19:52
DCS控制系統(tǒng)PID參數(shù)的整定方法.(深圳市普德新星電源技術(shù)有限公司怎么樣)-該文檔為DCS控制系統(tǒng)PID參數(shù)的整定方法.講解資料,講解的還不錯,感興趣的可以下載看看…………………………
2021-08-04 15:40:1843 PID參數(shù)整定資料免費下載。
2021-06-01 10:36:1330 可以得到各種輸出響應(yīng)特性,也就是說,通過適當給定PID參數(shù),大多數(shù)的控制任務(wù)都可以由PID完成。本文根據(jù)經(jīng)典PID控制理論,結(jié)合玖陽自動化科技公司的一線通模塊,詳細介紹PID參數(shù)在整個控制過程中所起的作用,指導(dǎo)PID控制中的參數(shù)整定。
2021-06-01 10:28:0157 數(shù)字PID及其參數(shù)整定方法介紹。
2021-05-31 16:34:2224 它主要依賴工程經(jīng)驗,直接在控制系統(tǒng)的試驗中進行,且方法簡單、易于掌握,在工程實際中被廣泛采用。PID控制器參數(shù)的工程整定方法,主要有臨界比例法、反應(yīng)曲線法和衰減法。
2021-02-09 17:22:002132 深入研究了PID控制理論,運用了多種方法設(shè)計了PID控制器。內(nèi)容包括兩個部分,其中第一部分為前四章,主要是關(guān)于單變量PID控制器的參數(shù)整定研究。
2019-12-04 08:00:0013 將模糊控制與PID控制結(jié)合,利用模糊推理方法實現(xiàn)對PID參數(shù)的在線自整定。使用MATLAB對系統(tǒng)進行仿真,結(jié)果表明系統(tǒng)的動態(tài)性能得到了提高。
2019-11-13 15:16:0737 PID 控制算法簡單、應(yīng)用廣泛,既能消除余差,又能提高系統(tǒng)的穩(wěn)定性,但其P 環(huán)節(jié)、I 環(huán)節(jié)、D 環(huán)節(jié)的控制參數(shù)卻參數(shù)難以整定;BP 神經(jīng)網(wǎng)絡(luò)算法具有很強的數(shù)字運算能力,因此,可通過BP 神經(jīng)網(wǎng)絡(luò)
2019-10-11 16:06:4837 PID是比例、積分、微分的簡稱,PID控制的難點不是編程,而是控制器的參數(shù)整定。參數(shù)整定的關(guān)鍵是正確地理解各參數(shù)的物理意義,PID控制的原理可以用人對爐溫的手動控制來理解。閱讀本文不需要高深的數(shù)學知識。
2018-05-31 08:40:4443 論上可以證明,對于過程控制的典型對象──“一階滯后+純滯后”與“二階滯后+純滯后”的控制對象,PID控制器是一種最優(yōu)控制。PID調(diào)節(jié)規(guī)律是連續(xù)系統(tǒng)動態(tài)品質(zhì)校正的一種有效方法,它的參數(shù)整定方式簡便,結(jié)構(gòu)改變靈活(PI、PD、…)。
2018-03-16 13:56:5927881 
PID控制是最早發(fā)展起來的控制策略之一,因為它所涉及的設(shè)計算法和控制結(jié)構(gòu)都很簡單,因此,被廣泛應(yīng)用于過程控制和運動控制中。但在實際系統(tǒng)設(shè)計過程中,設(shè)計師經(jīng)常受到參數(shù)整定方法繁雜的困擾,PID控制器
2017-11-24 16:42:5034401 
PID算法是工程控制領(lǐng)域常用的一種算法,其有著技術(shù)成熟,不需要建立數(shù)學模型,參數(shù)整定靈活,適用性強,魯棒性強,控制效果好等優(yōu)點,得到了廣泛的應(yīng)用,其參數(shù)整定對控制效果影響極大,針對增量式的PID的參數(shù)整定方法在現(xiàn)有的文獻中較少涉及,本文將對增量式PID參數(shù)整定進行一定的探討。
2017-11-24 16:27:2714684 
對一個控制系統(tǒng)而言,由于控制對象的精確數(shù)學模型難以建立,系統(tǒng)的參數(shù)經(jīng)常發(fā)生變化,運用控制理論綜合分析要耗費很大的代價,卻不能得到預(yù)期的效果,所以人們往往采用PID調(diào)節(jié)器,根據(jù)經(jīng)驗在線整定參數(shù),以便得到滿意的控制效果。
2017-11-24 15:34:0854275 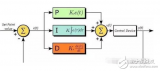
PID控制最通俗的解釋與PID參數(shù)的整定方法
2017-01-04 14:47:1540 自適應(yīng)粒子群優(yōu)化分數(shù)階PID控制器的參數(shù)整定_陳超波
2017-01-03 15:24:458 SLPC可編程調(diào)節(jié)器PID控制參數(shù)整定
2016-12-11 23:15:051 基于MATLAB/Simulink環(huán)境下的PID參數(shù)整定,感興趣的小伙伴們可以瞧一瞧。
2016-11-18 17:19:266 基于MATLAB的PID控制器參數(shù)整定及仿真,感興趣的小伙伴們可以瞧一瞧。
2016-11-18 17:19:263 基于遺傳算法的PID整定_源代碼
2016-09-26 16:31:1414 PID教程之PID參數(shù)整定方法及其應(yīng)用研究
2016-09-01 15:01:5225 PID如何調(diào)整(PID的參數(shù)整定),感興趣的發(fā)燒友們可以看一看。
2016-08-09 16:09:3518 永磁同步電機模糊PID參數(shù)自整定-2011。
2016-04-06 14:26:0419 基于參數(shù)自整定模糊PID控制策略的電機模型仿真研究-2004。
2016-04-05 11:14:2020 PID控制器設(shè)計與參數(shù)整定方法綜述-2005
2016-03-31 17:46:3325 PID調(diào)節(jié)器參數(shù)的繼電自整定方法-1998
2016-03-31 17:46:3316 參數(shù)自整定PID控制器設(shè)計與仿真,下來看看
2016-03-31 17:46:3333 基于MATLABSimuIink的PID參數(shù)整定-2009
2016-03-31 17:46:3312 基于MATLAB的模糊自整定PID參數(shù)控制器計算機仿真+(1)
2016-03-31 17:46:3321 PID控制器參數(shù)整定方法及其應(yīng)用研究-2005。
2016-03-31 17:05:5620 PID參數(shù)整定方法的研究-2009,下來看看。
2016-03-31 17:01:4920 A_PID調(diào)節(jié)器的調(diào)節(jié)過程及其參數(shù)的整定方法。
2016-03-31 16:57:3423 該系統(tǒng)采用自校正控制原理和常規(guī)PID控制相結(jié)合的算法!能快速整定出PID控制器的參數(shù)
2013-09-23 17:17:1961 針對傳統(tǒng)方法難以整定船載雷達伺服系統(tǒng)PID參數(shù)的問題,將模糊參數(shù)自整定PID控制技術(shù)應(yīng)用到伺服系統(tǒng)位置回路中,通過仿真實驗表明該方法可以不依賴系統(tǒng)的數(shù)學模型,而根據(jù)輸入輸
2013-07-25 17:47:0328 針對 PID參數(shù)復(fù)雜繁瑣的整定過程這一問題,提出了基于MATLAB/Simulink仿真環(huán)境,模擬工程穩(wěn)定邊界法的船載雷達伺服系統(tǒng)PID參數(shù)整定策略和步驟,并進行了仿真實驗。結(jié)果表明該方法具有
2013-07-25 11:32:4231 本文主要研究了一種手持式的PID參數(shù)整定儀器,此整定儀具有整定單變量和雙變量的雙重功能,控制系統(tǒng)主要采用低能耗的MSP430微控制器,軟件部分采用的軟件開發(fā)平臺是IAR MSP430 V3.42
2011-05-20 09:54:232713 
各種智能型數(shù)字顯示調(diào)節(jié)儀,一般都具有PID參數(shù)自整定功能。儀表在初次使用時,可通過自整定確定系統(tǒng)的最佳P、I、D調(diào)節(jié)參數(shù),實現(xiàn)理想的調(diào)節(jié)控
2010-07-20 18:10:57771 一種積分過程PID自整定方法:針對積分加滯后過程,提出了一種設(shè)定值加權(quán)的pid控制器參數(shù)自整定方法,并且針對該方法定義了一種魯棒性能指標.首先引入一種內(nèi)部反饋結(jié)構(gòu),利用
2010-03-18 15:58:0721 基于CMAC神經(jīng)網(wǎng)絡(luò)的PID參數(shù)自整定方法的研究
0 引言
控制器的參數(shù)整定是通過對PID控制器參數(shù)(KP,KI,KD)的調(diào)整,使得系統(tǒng)的過渡過程達到滿意的質(zhì)量指標
2009-12-01 17:39:062588 基于免疫原理的控制器參數(shù)整定方法:基于免疫原理,建立了一個基于免疫機制進行控制器參數(shù)整定的數(shù)學模型。給出了參數(shù)整定問題中抗原、抗體和親和力的定義,對基于免疫原理
2009-10-21 08:05:059 積分過程在工業(yè)過程控制中經(jīng)常遇到,采用常規(guī)的PID 參數(shù)整定方法很難得到理想的控制效果。本文采用基于H∞回路成形的魯棒PID 參數(shù)整定方法,實現(xiàn)對積分過程的有效控制。通過Si
2009-08-07 09:51:168 實驗 PID的參數(shù)整定及參數(shù)變化對系統(tǒng)的影響綜合實驗
一、 實驗?zāi)康模?、 掌握PID各校正環(huán)節(jié)的作用2、 確定給
2009-05-17 10:35:5525505 
PID控制器參數(shù)的優(yōu)化整定一直是自動控制領(lǐng)域的研究熱點。提出一種利用改進思維進化計算(MEC)優(yōu)化PID控制器參數(shù)的方法,在原有算法的框架上,加入自調(diào)整操作,依據(jù)進化方向
2009-03-15 02:39:5131 對PID算法及參數(shù)自整定進行了研究,介紹了!"# 控制算法在溫控系統(tǒng)中的應(yīng)用,給出了以ASTROM提出的極限環(huán)法為基礎(chǔ)實現(xiàn)PID參數(shù)自整定的原理及軟件實現(xiàn)。在此基礎(chǔ)上提出了一種基于P
2009-03-13 11:24:30105 摘要:傳統(tǒng)的繼電振蕩PID 參數(shù)自整定方法由于在整定期間要使系統(tǒng)處于臨界振蕩狀態(tài),并且整定周期較長,限制了在許多工業(yè)控制過程中的應(yīng)用。介紹了一種基于開關(guān)階躍響應(yīng)算法的
2009-01-17 21:51:0934 基于衰減頻率特性的PID參數(shù)優(yōu)化整定研究Researching the Tuning Optimization of PID Parameters Based on Attenuated Frequency Characteristi
摘要:用衰減頻率特性法整定PID控制器可使閉環(huán)系統(tǒng)獲
2009-01-11 12:06:3319
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論