 電子發(fā)燒友App
電子發(fā)燒友App


本文主要是關于直流電機的相關介紹,并著重對直流電機優(yōu)點和缺點進行了詳盡的闡述。
直流電機
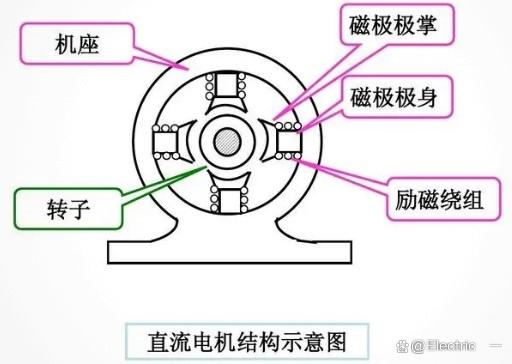
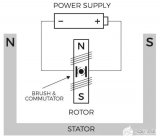
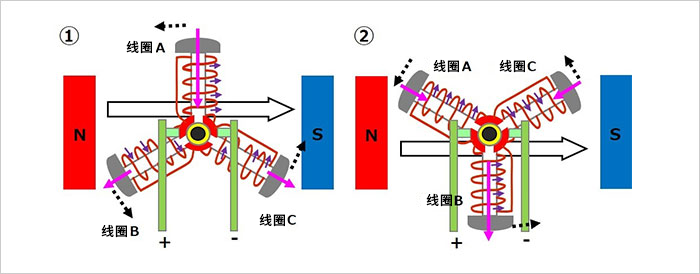
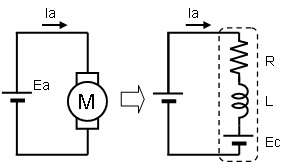
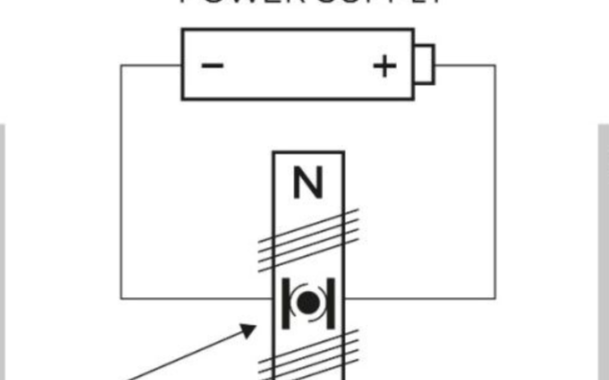
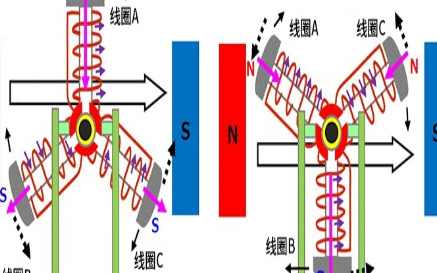
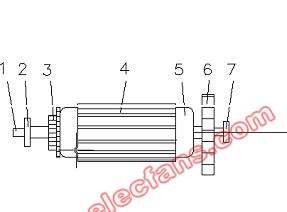
直流電動機 是將直流電能轉(zhuǎn)換為機械能的電動機。因其良好的調(diào)速性能而在電力拖動中得到廣泛應用。直流電動機按勵磁方式分為永磁、他勵和自勵3類,其中自勵又分為并勵、串勵和復勵3種。當直流電源通過電刷向電樞繞組供電時,電樞表面的N極下導體可以流過相同方向的電流,根據(jù)左手定則導體將受到逆時針方向的力矩作用;電樞表面S極下部分導體也流過相同方向的電流,同樣根據(jù)左手定則導體也將受到逆時針方向的力矩作用。這樣,整個電樞繞組即轉(zhuǎn)子將按逆時針旋轉(zhuǎn),輸入的直流電能就轉(zhuǎn)換成轉(zhuǎn)子軸上輸出的機械能。由定子和轉(zhuǎn)子組成,定子:基座,主磁極,換向極,電刷裝置等;轉(zhuǎn)子(電樞):電樞鐵心,電樞繞組,換向器,轉(zhuǎn)軸和風扇等。
基本構造分為兩部分:定子與轉(zhuǎn)子。注意:不要把換向極與換向器弄混淆了定子包括:主磁極,機座,換向極,電刷裝置等。轉(zhuǎn)子包括:電樞鐵芯,電樞(shu)繞組,換向器,軸和風扇等。轉(zhuǎn)子組成直流電動機轉(zhuǎn)子部分由電樞鐵芯、電樞、換向器等裝置組成,下面對構造中的各部件進行詳細介紹。1.電樞鐵芯部分:其作用是嵌放電樞繞組和顛末磁通,為了下降電機工作時電樞鐵芯中發(fā)作的渦流損耗和磁滯損耗。2.電樞部分:作用是發(fā)作電磁轉(zhuǎn)矩和感應電動勢,而進行能量變換。電樞繞組有許多線圈或玻璃絲包扁鋼銅線或強度漆包線。3.換向器又稱整流子,在直流電動機中,它的作用是將電刷上的直流電源的電流變換成電樞繞組內(nèi)的溝通電流,使電磁轉(zhuǎn)矩的傾向穩(wěn)定不變,在直流發(fā)電機中,它將電樞繞組溝通電動勢變換為電刷端上輸出地直流電動勢。換向器由許多片構成的圓柱體之間用云母絕緣,電樞繞組每一個線圈兩端區(qū)分接在兩個換向片上。直流發(fā)電機中換向器的作用是把電樞繞組中的交變電動熱變換為電刷間的直流電動勢,負載中就有電流通過,直流發(fā)電機向負載輸出電功率,同時電樞線圈中也肯定有電流通過。它與磁場相互作用發(fā)作電磁轉(zhuǎn)矩,其傾向與發(fā)電機相反,原想法只需抑制這一磁場轉(zhuǎn)矩才華股動電樞改變。因此,發(fā)電機向負載輸出電功率的還,從原想法輸出機械功率,完結了直流發(fā)電機將機械能變換為電能的作用。
直流電機優(yōu)點和缺點有哪些
直流電機優(yōu)點:
1、起動和調(diào)速性能好,調(diào)速范圍廣平滑,過載能力較強,受電磁干擾影響小;
2、直流電機具有良好的啟動特性和調(diào)速特性;
3、直流電機的轉(zhuǎn)矩比較大
4、維修比較便宜;
5、直流電機的直流相對于交流比較節(jié)能環(huán)保。
直流電機缺點:
1、直流電機制造比較貴,有碳刷 ;
2、與異步電動機比較,直流電動機結構復雜,使用維護不方便,而且要用直流電源;
3、復雜的結構限制了直流電動機體積和重量的進一步減小,尤其是電刷和換向器的滑動接觸造成了機械磨損和火花,使直流電動機的故障多、可靠性低、壽命短、保養(yǎng)維護工作量大。
4、換向火花既造成了換向器的電腐蝕,還是一個無線電干擾源,會對周圍的電器設備帶來有害的影響。電機的容量越大、轉(zhuǎn)速越高,問題就越嚴重。所以,普通直流電動機的電刷和換向器限制了直流電動機向高速度、大容量的發(fā)展。
總結:
通過以上對直流電機優(yōu)點和缺點的分析,我們可以發(fā)現(xiàn)直流電機是種調(diào)速性能好、維修比較便宜、過載能力較強,受電磁干擾影響小、,但是制造比較貴,有碳刷、靠性低、壽命短、保養(yǎng)維護工作量大的電機設備。即使直流電機還有很多不足的地方,但是在現(xiàn)代科學技術的幫助下,直流電機一定會有更好的將來。
直流電機和步進電機的區(qū)別
1 直流電機
1.1 什么是電機
…
1.2 常見電機
(1)交流電機:兩相、三相。
(2)直流電機:永磁、勵磁。
(3)步進電機、伺服電機。
1.3 直流電機詳解
(1)外觀。
(2)接線和工作原理。
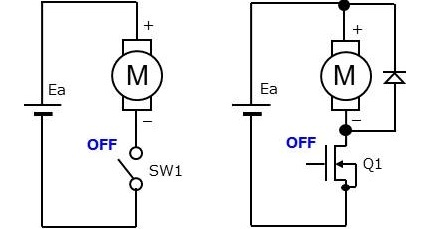
(3)直流電機的驅(qū)動問題:不能用IO口直接驅(qū)動。
1.4 直流電機實驗
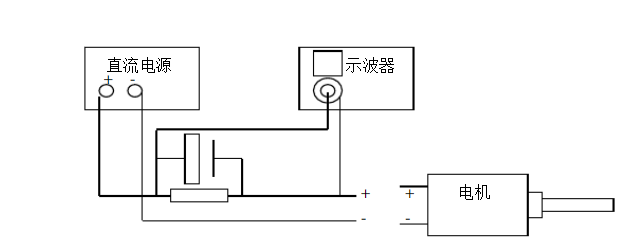
(1)直流電機直接接在開發(fā)板的主板的VCC和GND引出接口上看電機是否轉(zhuǎn)動,還可以調(diào)換VCC和GND看電機是否反轉(zhuǎn)了。
(2)單片機的IO口是數(shù)字口,本身的驅(qū)動能力非常小(最多20mA級別),這個驅(qū)動能力是帶不動電動機的。
(3)一般單片機需要使用專門的驅(qū)動芯片來驅(qū)動電機。驅(qū)動芯片的作用就是把單片機的小電流的控制信號轉(zhuǎn)成邏輯上相同的大電流的驅(qū)動源。這就是所謂的弱電控制強電。用電機驅(qū)動芯片來驅(qū)動直流電機,具體的電路分析后面講步進電機時會詳細說。
2 步進電機理論
2.1 什么是步進電機
(1)外觀。
(2)功能特點。
(3)操作接口。
2.2 步長
(1)步進電機有一個固有步距角,這個參數(shù)和步進電機本身有關。
(2)步進電機一般情況下只能以固有步距角的整數(shù)倍來運動,這一個固有步距角的移動就叫一個節(jié)拍。
(2)電機還有個可以比固有步距角更小的運動方法,這種方法叫細分,由電機驅(qū)動器來支持的。
2.3 相數(shù)
結論:我們用的是2相步進電機
2.4細分
…
2.5 極性
(1)單極性。
(2)雙極性。
2.6 拍數(shù)
(1)單相四拍:
A/ B A B/ 正轉(zhuǎn)
B/ A B A/ 反轉(zhuǎn)
時序:A/ B A B/
四根線上電平
A A/ B B/
0 1 0 0 第1拍
0 0 1 0 第2拍
1 0 0 0 第3拍
0 0 0 1 第4拍
4個節(jié)拍加起來就是一個完整的周期,按照這個周期給步進電機供電,則步進電機就會轉(zhuǎn)動1個步距角。
(2)雙相四拍:
A/B AB AB/ A/B/ 正轉(zhuǎn)
A/B/ AB/ AB A/B 反轉(zhuǎn)
時序:A/B AB AB/ A/B/
四根線上電平
A A/ B B/
0 1 1 0 第1拍
1 0 1 0 第2拍
1 0 0 1 第3拍
0 1 0 1 第4拍
(3)半步八拍:
A/ A/B B AB A AB/ B/ A/B/ 正轉(zhuǎn)
A/B/ B/ AB/ A AB B A/B A/ 反轉(zhuǎn)
(1)一套步進電機的系統(tǒng)需要三部分:控制器+驅(qū)動器+步進電機。
(2)一般情況下:控制器就是單片機,驅(qū)動器一般是接在單片機的IO口上面的專用電機驅(qū)動芯片(譬如我們開發(fā)板上的TC1508S)。
(3)控制器負責產(chǎn)生時序信號,驅(qū)動器負責將時序信號轉(zhuǎn)成功率驅(qū)動信號給步進電機用。
3 開發(fā)板原理圖分析說明
3.1 原理圖分析
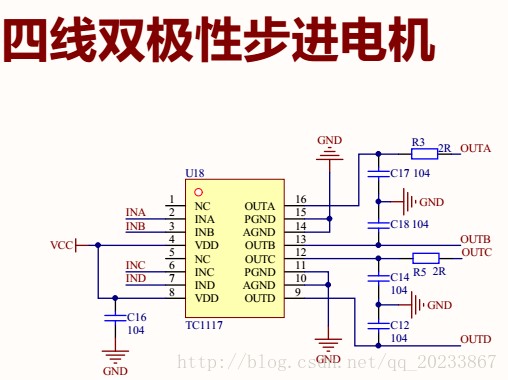
(1)原理圖中INA、INB、INC、IND將來要接單片機的IO口,單片機是做控制器的,通過單片機的IO口給驅(qū)動器芯片輸入1或者0的控制信號,控制信號經(jīng)過TC1117的轉(zhuǎn)換,從OUTA、OUTB、OUTC、OUTD四個腳輸出具有驅(qū)動步進電機能力的驅(qū)動信號。
(2)接線:譬如可以用P0端口的4個引腳(我實際用P0.0-P0.3)接INA、INB、INC、IND。
(3)輸出端本來符號是OUTA、OUTB、OUTC、OUTD,但是開發(fā)板上實際絲印的符號是;A-、A+、B-、B+。所以這里面有個對應關系:OUTA對應A-、OUTB對應A+、OUTC對應B-、OUTD對應B+。
(4)絲印符號改變主要是為了對應步進電機上面的符號,讓我們方便接線不會接錯。
(5)結合之前講的步進電機的原理,可知:A-和A+是一個相線線圈的2端,B-和B+是另一個線圈。
4 步進電機編程實踐
4.1 接線
(1)P0端口的P0.0-P0.3接電機驅(qū)動芯片TC1508S的4個輸入端。
(2)TC1508S的4個輸出端接步進電機(按照絲印符號相對應即可)。
(3)根據(jù)上面的接線,實際得到的接線邏輯是:P0.0和P0.1對應一組線圈,而P0.2和P0.3對應另一組線圈。
4.2 單相四拍方式驅(qū)動
(1)時序編程:A/ B A B/。
(2)轉(zhuǎn)速控制:轉(zhuǎn)速是由脈沖信號的頻率控制的,其實就是delay的時間。
(3)正轉(zhuǎn)與反轉(zhuǎn)。
#include 《reg51.h》
#define TIME 30 // 延時時間
sbit APositive = P0^0;
sbit ANegative = P0^1;
sbit BPositive = P0^2;
sbit BNegative = P0^3;
void delay(unsigned char i)
{
unsigned char a, b;
for (a=i; a》0; a--)
for (b=240; b》0; b--);
}
void main(void)
{
while (1)
{
// 循環(huán)內(nèi)實現(xiàn)1個周期
// 一個周期其實就是各個節(jié)拍依次排列構成的,注意節(jié)拍之間要延時
/*
// 單相4拍 A/ B A B/
APositive = 0;
ANegative = 1;
BPositive = 0; // B負和B正這兩根線電平只要一樣即可,兩個1和
BNegative = 0; // 兩個0效果是一樣的
delay(TIME);
APositive = 0;
ANegative = 0;
BPositive = 1; // B負和B正這兩根線電平只要一樣即可,兩個1和
BNegative = 0; // 兩個0效果是一樣的
delay(TIME);
APositive = 1;
ANegative = 0;
BPositive = 0; // B負和B正這兩根線電平只要一樣即可,兩個1和
BNegative = 0; // 兩個0效果是一樣的
delay(TIME);
APositive = 0;
ANegative = 0;
BPositive = 0; // B負和B正這兩根線電平只要一樣即可,兩個1和
BNegative = 1; // 兩個0效果是一樣的
delay(TIME);
*/
// 反轉(zhuǎn) A/ B A B/
APositive = 0;
ANegative = 0;
BPositive = 0; // B負和B正這兩根線電平只要一樣即可,兩個1和
BNegative = 1; // 兩個0效果是一樣的
delay(TIME);
APositive = 1;
ANegative = 0;
BPositive = 0; // B負和B正這兩根線電平只要一樣即可,兩個1和
BNegative = 0; // 兩個0效果是一樣的
delay(TIME);
APositive = 0;
ANegative = 0;
BPositive = 1; // B負和B正這兩根線電平只要一樣即可,兩個1和
BNegative = 0; // 兩個0效果是一樣的
delay(TIME);
APositive = 0;
ANegative = 1;
BPositive = 0; // B負和B正這兩根線電平只要一樣即可,兩個1和
BNegative = 0; // 兩個0效果是一樣的
delay(TIME);
}
}123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384
4. 3 雙相四拍方式驅(qū)動
A/B AB AB/ A/B/
4.4 半步八拍方式驅(qū)動
A/ A/B B AB A AB/ B/ A/B/
#include 《reg51.h》
#define TIME 30 // 延時時間
sbit APositive = P0^0;
sbit ANegative = P0^1;
sbit BPositive = P0^2;
sbit BNegative = P0^3;
void delay(unsigned char i)
{
unsigned char a, b;
for (a=i; a》0; a--)
for (b=240; b》0; b--);
}
void main(void)
{
while (1)
{
// 循環(huán)內(nèi)實現(xiàn)1個周期
// 一個周期其實就是各個節(jié)拍依次排列構成的,注意節(jié)拍之間要延時
/*
// 雙相4拍 A/B AB AB/ A/B/
APositive = 0;
ANegative = 1;
BPositive = 1; // B負和B正這兩根線電平只要一樣即可,兩個1和
BNegative = 0; // 兩個0效果是一樣的
delay(TIME);
APositive = 1;
ANegative = 0;
BPositive = 1; // B負和B正這兩根線電平只要一樣即可,兩個1和
BNegative = 0; // 兩個0效果是一樣的
delay(TIME);
APositive = 1;
ANegative = 0;
BPositive = 0; // B負和B正這兩根線電平只要一樣即可,兩個1和
BNegative = 1; // 兩個0效果是一樣的
delay(TIME);
APositive = 0;
ANegative = 1;
BPositive = 0; // B負和B正這兩根線電平只要一樣即可,兩個1和
BNegative = 1; // 兩個0效果是一樣的
delay(TIME);
*/
// 半步8拍 A/ A/B B AB A AB/ B/ A/B/
APositive = 0;
ANegative = 1;
BPositive = 0;
BNegative = 0;
delay(TIME);
APositive = 0;
ANegative = 1;
BPositive = 1;
BNegative = 0;
delay(TIME);
APositive = 0;
ANegative = 0;
BPositive = 1;
BNegative = 0;
delay(TIME);
APositive = 1;
ANegative = 0;
BPositive = 1;
BNegative = 0;
delay(TIME);
APositive = 1;
ANegative = 0;
BPositive = 0;
BNegative = 0;
delay(TIME);
APositive = 1;
ANegative = 0;
BPositive = 0;
BNegative = 1;
delay(TIME);
APositive = 0;
ANegative = 0;
BPositive = 0;
BNegative = 1;
delay(TIME);
APositive = 0;
ANegative = 1;
BPositive = 0;
BNegative = 1;
delay(TIME);
}
}
結語
關于直流電機的相關介紹就到這了,如有不足之處歡迎指正。












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論