 電子發燒友App
電子發燒友App


早期的內核版本中,進程的調度基于一個稱之為tick的時鐘滴答,通常使用時鐘中斷來定時地產生tick信號,每次tick定時中斷都會進行進程的統計和調度,并對tick進行計數,記錄在一個jiffies變量中,定時器的設計也是基于jiffies。這時候的內核代碼中,幾乎所有關于時鐘的操作都是在machine級的代碼中實現,很多公共的代碼要在每個平臺上重復實現。隨后,隨著通用時鐘框架的引入,內核需要支持高精度的定時器,為此,通用時間框架為定時器硬件定義了一個標準的接口:clock_event_device,machine級的代碼只要按這個標準接口實現相應的硬件控制功能,剩下的與平臺無關的特性則統一由通用時間框架層來實現。
1. ?時鐘事件軟件架構
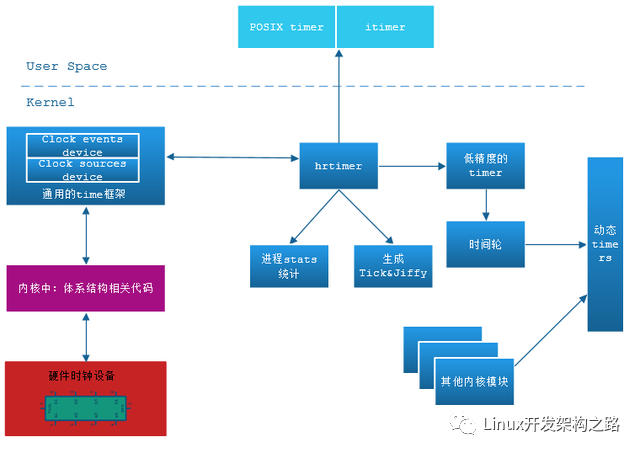
本系列文章的第一節中,我們曾經討論了時鐘源設備:clocksource,現在又來一個時鐘事件設備:clock_event_device,它們有何區別?看名字,好像都是給系統提供時鐘的設備,實際上,clocksource不能被編程,沒有產生事件的能力,它主要被用于timekeeper來實現對真實時間進行精確的統計,而clock_event_device則是可編程的,它可以工作在周期觸發或單次觸發模式,系統可以對它進行編程,以確定下一次事件觸發的時間,clock_event_device主要用于實現普通定時器和高精度定時器,同時也用于產生tick事件,供給進程調度子系統使用。時鐘事件設備與通用時間框架中的其他模塊的關系如下圖所示:

圖1.1 ? clock_event_device軟件架構
與clocksource一樣,系統中可以存在多個clock_event_device,系統會根據它們的精度和能力,選擇合適的clock_event_device對系統提供時鐘事件服務。在smp系統中,為了減少處理器間的通信開銷,基本上每個cpu都會具備一個屬于自己的本地clock_event_device,獨立地為該cpu提供時鐘事件服務,smp中的每個cpu基于本地的clock_event_device,建立自己的tick_device,普通定時器和高精度定時器。
在軟件架構上看,clock_event_device被分為了兩層,與硬件相關的被放在了machine層,而與硬件無關的通用代碼則被集中到了通用時間框架層,這符合內核對軟件的設計需求,平臺的開發者只需實現平臺相關的接口即可,無需關注復雜的上層時間框架。
tick_device是基于clock_event_device的進一步封裝,用于代替原有的時鐘滴答中斷,給內核提供tick事件,以完成進程的調度和進程信息統計,負載平衡和時間更新等操作。
2. ?時鐘事件設備相關數據結構
2.1 ?struct clock_event_device
時鐘事件設備的核心數據結構是clock_event_device結構,它代表著一個時鐘硬件設備,該設備就好像是一個具有事件觸發能力(通常就是指中斷)的clocksource,它不停地計數,當計數值達到預先編程設定的數值那一刻,會引發一個時鐘事件中斷,繼而觸發該設備的事件處理回調函數,以完成對時鐘事件的處理。clock_event_device結構的定義如下:
[cpp]?view plain?copy
struct?clock_event_device?{??
void????????????(*event_handler)(struct?clock_event_device?*);??
int?????????(*set_next_event)(unsigned?long?evt,??
struct?clock_event_device?*);??
int?????????(*set_next_ktime)(ktime_t?expires,??
struct?clock_event_device?*);??
ktime_t?????????next_event;??
u64?????????max_delta_ns;??
u64?????????min_delta_ns;??
u32?????????mult;??
u32?????????shift;??
enum?clock_event_mode???mode;??
unsigned?int????????features;??
unsigned?long???????retries;??
void????????????(*broadcast)(const?struct?cpumask?*mask);??
void????????????(*set_mode)(enum?clock_event_mode?mode,??
struct?clock_event_device?*);??
unsigned?long???????min_delta_ticks;??
unsigned?long???????max_delta_ticks;??
const?char??????*name;??
int?????????rating;??
int?????????irq;??
const?struct?cpumask????*cpumask;??
struct?list_head????list;??
}?____cacheline_aligned;??
event_handler? 該字段是一個回調函數指針,通常由通用框架層設置,在時間中斷到來時,machine底層的的中斷服務程序會調用該回調,框架層利用該回調實現對時鐘事件的處理。
set_next_event??設置下一次時間觸發的時間,使用類似于clocksource的cycle計數值(離現在的cycle差值)作為參數。
set_next_ktime??設置下一次時間觸發的時間,直接使用ktime時間作為參數。
max_delta_ns ?可設置的最大時間差,單位是納秒。
min_delta_ns ?可設置的最小時間差,單位是納秒。
mult shift??與clocksource中的類似,只不過是用于把納秒轉換為cycle。
mode??該時鐘事件設備的工作模式,兩種主要的工作模式分別是:
CLOCK_EVT_MODE_PERIODIC ?周期觸發模式,設置后按給定的周期不停地觸發事件;
CLOCK_EVT_MODE_ONESHOT ?單次觸發模式,只在設置好的觸發時刻觸發一次;
set_mode??函數指針,用于設置時鐘事件設備的工作模式。
rating? 表示該設備的精度等級。
list? 系統中注冊的時鐘事件設備用該字段掛在全局鏈表變量clockevent_devices上。
2.2 ?全局變量clockevent_devices
系統中所有注冊的clock_event_device都會掛在該鏈表下面,它在kernel/time/clockevents.c中定義:
[cpp]?view plain?copy
static?LIST_HEAD(clockevent_devices);??
2.3 ?全局變量clockevents_chain
通用時間框架初始化時會注冊一個通知鏈(NOTIFIER),當系統中的時鐘時間設備的狀態發生變化時,利用該通知鏈通知系統的其它模塊。
[cpp]?view plain?copy
/*?Notification?for?clock?events?*/??
static?RAW_NOTIFIER_HEAD(clockevents_chain);??
3. ?clock_event_device的初始化和注冊
每一個machine,都要定義一個自己的machine_desc結構,該結構定義了該machine的一些最基本的特性,其中需要設定一個sys_timer結構指針,machine級的代碼負責定義sys_timer結構,sys_timer的聲明很簡單:
[cpp]?view plain?copy
struct?sys_timer?{??
void????????????(*init)(void);??
void????????????(*suspend)(void);??
void????????????(*resume)(void);??
#ifdef?CONFIG_ARCH_USES_GETTIMEOFFSET??
unsigned?long???????(*offset)(void);??
#endif??
};??
通常,我們至少要定義它的init字段,系統初始化階段,該init回調會被調用,該init回調函數的主要作用就是完成系統中的clocksource和clock_event_device的硬件初始化工作,以samsung的exynos4為例,在V3.4內核的代碼樹中,machine_desc的定義如下:
[cpp]?view plain?copy
MACHINE_START(SMDK4412,?"SMDK4412")??
/*?Maintainer:?Kukjin?Kim??*/??
/*?Maintainer:?Changhwan?Youn??*/??
.atag_offset????=?0x100,??
.init_irq???=?exynos4_init_irq,??
.map_io?????=?smdk4x12_map_io,??
.handle_irq?=?gic_handle_irq,??
.init_machine???=?smdk4x12_machine_init,??
.timer??????=?&exynos4_timer,??
.restart????=?exynos4_restart,??
MACHINE_END??
定義的sys_timer是exynos4_timer,它的定義和init回調定義如下:
[cpp]?view plain?copy
static?void?__init?exynos4_timer_init(void)??
{??
if?(soc_is_exynos4210())??
mct_int_type?=?MCT_INT_SPI;??
else??
mct_int_type?=?MCT_INT_PPI;??
exynos4_timer_resources();??
exynos4_clocksource_init();??
exynos4_clockevent_init();??
}??
struct?sys_timer?exynos4_timer?=?{??
.init???????=?exynos4_timer_init,??
};??
exynos4_clockevent_init函數顯然是初始化和注冊clock_event_device的合適時機,在這里,它注冊了一個rating為250的clock_event_device,并把它指定給cpu0:
[cpp]?view plain?copy
static?struct?clock_event_device?mct_comp_device?=?{??
.name???????=?"mct-comp",??
.features???????=?CLOCK_EVT_FEAT_PERIODIC?|?CLOCK_EVT_FEAT_ONESHOT,??
.rating?????=?250,??
.set_next_event?=?exynos4_comp_set_next_event,??
.set_mode???=?exynos4_comp_set_mode,??
};??
......??
static?void?exynos4_clockevent_init(void)??
{??
clockevents_calc_mult_shift(&mct_comp_device,?clk_rate,?5);??
......??
mct_comp_device.cpumask?=?cpumask_of(0);??
clockevents_register_device(&mct_comp_device);??
setup_irq(EXYNOS4_IRQ_MCT_G0,?&mct_comp_event_irq);??
}??
因為這個階段其它cpu核尚未開始工作,所以該clock_event_device也只是在啟動階段給系統提供服務,實際上,因為exynos4是一個smp系統,具備2-4個cpu核心,前面說過,smp系統中,通常會使用各個cpu的本地定時器來為每個cpu單獨提供時鐘事件服務,繼續翻閱代碼,在系統初始化的后段,kernel_init會被調用,它會調用smp_prepare_cpus,其中會調用percpu_timer_setup函數,在arch/arm/kernel/smp.c中,為每個cpu定義了一個clock_event_device:
[cpp]?view plain?copy
/*?
*?Timer?(local?or?broadcast)?support?
*/??
static?DEFINE_PER_CPU(struct?clock_event_device,?percpu_clockevent);??
percpu_timer_setup最終會調用exynos4_local_timer_setup函數完成對本地clock_event_device的初始化工作:
[cpp]?view plain?copy
static?int?__cpuinit?exynos4_local_timer_setup(struct?clock_event_device?*evt)??
{??
......??
evt->name?=?mevt->name;??
evt->cpumask?=?cpumask_of(cpu);??
evt->set_next_event?=?exynos4_tick_set_next_event;??
evt->set_mode?=?exynos4_tick_set_mode;??
evt->features?=?CLOCK_EVT_FEAT_PERIODIC?|?CLOCK_EVT_FEAT_ONESHOT;??
evt->rating?=?450;??
clockevents_calc_mult_shift(evt,?clk_rate?/?(TICK_BASE_CNT?+?1),?5);??
......??
clockevents_register_device(evt);??
......??
enable_percpu_irq(EXYNOS_IRQ_MCT_LOCALTIMER,?0);??
......??
return?0;??
}??
由此可見,每個cpu的本地clock_event_device的rating是450,比啟動階段的250要高,顯然,之前注冊給cpu0的精度要高,系統會用本地clock_event_device替換掉原來分配給cpu0的clock_event_device,至于怎么替換?我們先停一停,到這里我們一直在討論machine級別的初始化和注冊,讓我們回過頭來,看看框架層的初始化。在繼續之前,讓我們看看整個clock_event_device的初始化的調用序列圖:
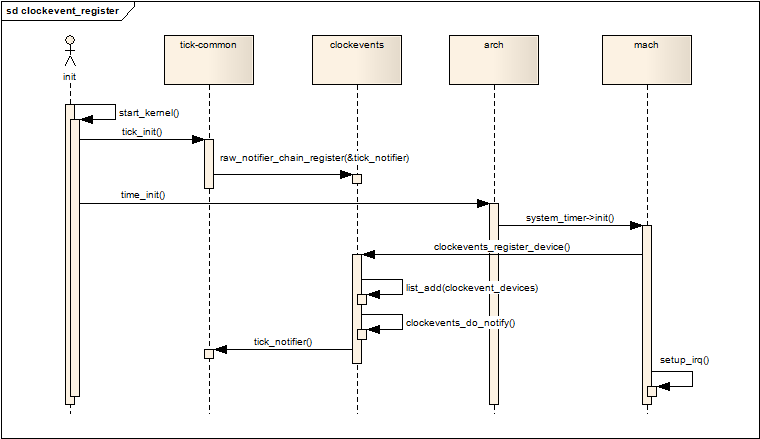
圖3.1 ?clock_event_device的系統初始化
由上面的圖示可以看出,框架層的初始化步驟很簡單,又start_kernel開始,調用tick_init,它位于kernel/time/tick-common.c中,也只是簡單地調用clockevents_register_notifier,同時把類型為notifier_block的tick_notifier作為參數傳入,回看2.3節,clockevents_register_notifier注冊了一個通知鏈,這樣,當系統中的clock_event_device狀態發生變化時(新增,刪除,掛起,喚醒等等),tick_notifier中的notifier_call字段中設定的回調函數tick_notify就會被調用。接下來start_kernel調用了time_init函數,該函數通常定義在體系相關的代碼中,正如前面所討論的一樣,它主要完成machine級別對時鐘系統的初始化工作,最終通過clockevents_register_device注冊系統中的時鐘事件設備,把每個時鐘時間設備掛在clockevent_device全局鏈表上,最后通過clockevent_do_notify觸發框架層事先注冊好的通知鏈,其實就是調用了tick_notify函數,我們主要關注CLOCK_EVT_NOTIFY_ADD通知,其它通知請自行參考代碼,下面是tick_notify的簡化版本:
[cpp]?view plain?copy
static?int?tick_notify(struct?notifier_block?*nb,?unsigned?long?reason,??
void?*dev)??
{??
switch?(reason)?{??
case?CLOCK_EVT_NOTIFY_ADD:??
return?tick_check_new_device(dev);??
case?CLOCK_EVT_NOTIFY_BROADCAST_ON:??
case?CLOCK_EVT_NOTIFY_BROADCAST_OFF:??
case?CLOCK_EVT_NOTIFY_BROADCAST_FORCE:??
......??
case?CLOCK_EVT_NOTIFY_BROADCAST_ENTER:??
case?CLOCK_EVT_NOTIFY_BROADCAST_EXIT:??
......??
case?CLOCK_EVT_NOTIFY_CPU_DYING:??
......??
case?CLOCK_EVT_NOTIFY_CPU_DEAD:??
......??
case?CLOCK_EVT_NOTIFY_SUSPEND:??
......??
case?CLOCK_EVT_NOTIFY_RESUME:??
......??
}??
return?NOTIFY_OK;??
}??
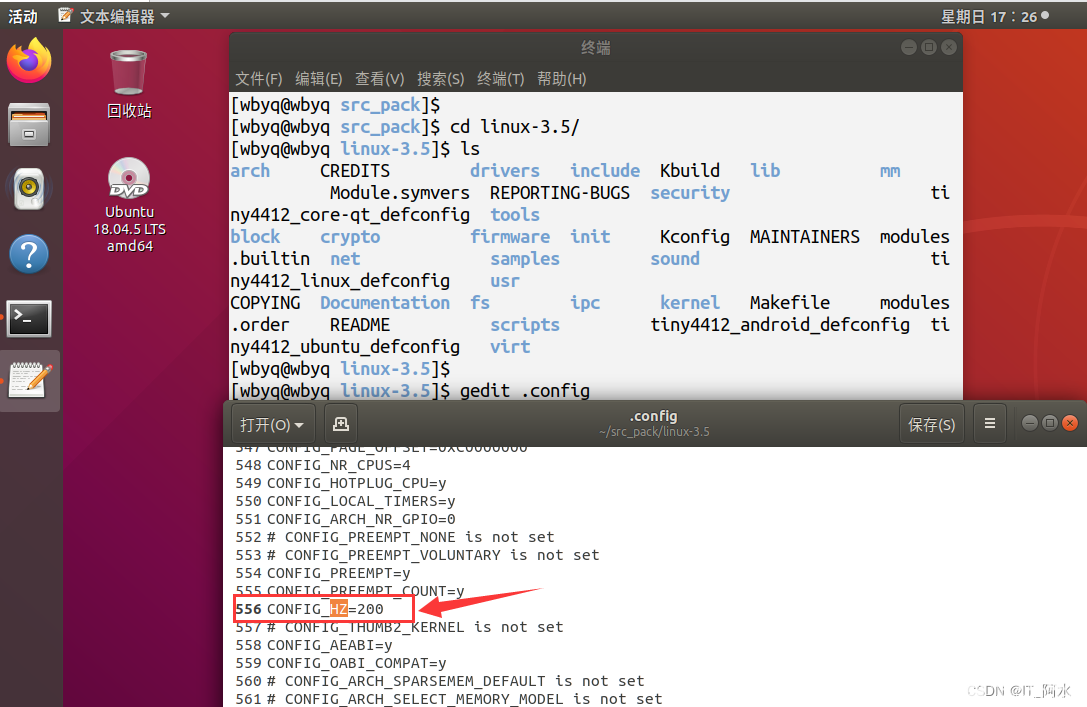
可見,對于新注冊的clock_event_device,會發出CLOCK_EVT_NOTIFY_ADD通知,最終會進入函數:tick_check_new_device,這個函數比對當前cpu所使用的與新注冊的clock_event_device之間的特性,如果認為新的clock_event_device更好,則會進行切換工作。下一節將會詳細的討論該函數。到這里,每個cpu已經有了自己的clock_event_device,在這以后,框架層的代碼會根據內核的配置項(CONFIG_NO_HZ、CONFIG_HIGH_RES_TIMERS),對注冊的clock_event_device進行不同的設置,從而為系統的tick和高精度定時器提供服務,這些內容我們留在本系列的后續文章進行討論。
4. ?tick_device
當內核沒有配置成支持高精度定時器時,系統的tick由tick_device產生,tick_device其實是clock_event_device的簡單封裝,它內嵌了一個clock_event_device指針和它的工作模式:
[cpp]?view plain?copy
struct?tick_device?{??
struct?clock_event_device?*evtdev;??
enum?tick_device_mode?mode;??
};??
在kernel/time/tick-common.c中,定義了一個per-cpu的tick_device全局變量,tick_cpu_device:
[cpp]?view plain?copy
/*?
*?Tick?devices?
*/??
DEFINE_PER_CPU(struct?tick_device,?tick_cpu_device);??
前面曾經說過,當machine的代碼為每個cpu注冊clock_event_device時,通知回調函數tick_notify會被調用,進而進入tick_check_new_device函數,下面讓我們看看該函數如何工作,首先,該函數先判斷注冊的clock_event_device是否可用于本cpu,然后從per-cpu變量中取出本cpu的tick_device:
[cpp]?view plain?copy
static?int?tick_check_new_device(struct?clock_event_device?*newdev)??
{??
......??
cpu?=?smp_processor_id();??
if?(!cpumask_test_cpu(cpu,?newdev->cpumask))??
goto?out_bc;??
td?=?&per_cpu(tick_cpu_device,?cpu);??
curdev?=?td->evtdev;??
如果不是本地clock_event_device,會做進一步的判斷:如果不能把irq綁定到本cpu,則放棄處理,如果本cpu已經有了一個本地clock_event_device,也放棄處理:
[cpp]?view plain?copy
if?(!cpumask_equal(newdev->cpumask,?cpumask_of(cpu)))?{??
......??
if?(!irq_can_set_affinity(newdev->irq))??
goto?out_bc;??
......??
if?(curdev?&&?cpumask_equal(curdev->cpumask,?cpumask_of(cpu)))??
goto?out_bc;??
}??
反之,如果本cpu已經有了一個clock_event_device,則根據是否支持單觸發模式和它的rating值,決定是否替換原來舊的clock_event_device:
[cpp]?view plain?copy
if?(curdev)?{??
if?((curdev->features?&?CLOCK_EVT_FEAT_ONESHOT)?&&??
!(newdev->features?&?CLOCK_EVT_FEAT_ONESHOT))??
goto?out_bc;??//?新的不支持單觸發,但舊的支持,所以不能替換??
if?(curdev->rating?>=?newdev->rating)??
goto?out_bc;??//?舊的比新的精度高,不能替換??
}??
在這些判斷都通過之后,說明或者來cpu還沒有綁定tick_device,或者是新的更好,需要替換:
[cpp]?view plain?copy
if?(tick_is_broadcast_device(curdev))?{??
clockevents_shutdown(curdev);??
curdev?=?NULL;??
}??
clockevents_exchange_device(curdev,?newdev);??
tick_setup_device(td,?newdev,?cpu,?cpumask_of(cpu));??
上面的tick_setup_device函數負責重新綁定當前cpu的tick_device和新注冊的clock_event_device,如果發現是當前cpu第一次注冊tick_device,就把它設置為TICKDEV_MODE_PERIODIC模式,如果是替換舊的tick_device,則根據新的tick_device的特性,設置為TICKDEV_MODE_PERIODIC或TICKDEV_MODE_ONESHOT模式。可見,在系統的啟動階段,tick_device是工作在周期觸發模式的,直到框架層在合適的時機,才會開啟單觸發模式,以便支持NO_HZ和HRTIMER。
5. ?tick事件的處理--最簡單的情況
clock_event_device最基本的應用就是實現tick_device,然后給系統定期地產生tick事件,通用時間框架對clock_event_device和tick_device的處理相當復雜,因為涉及配置項:CONFIG_NO_HZ和CONFIG_HIGH_RES_TIMERS的組合,兩個配置項就有4種組合,這四種組合的處理都有所不同,所以這里我先只討論最簡單的情況:
CONFIG_NO_HZ == 0;
CONFIG_HIGH_RES_TIMERS == 0;
在這種配置模式下,我們回到上一節的tick_setup_device函數的最后:
[cpp]?view plain?copy
if?(td->mode?==?TICKDEV_MODE_PERIODIC)??
tick_setup_periodic(newdev,?0);??
else??
tick_setup_oneshot(newdev,?handler,?next_event);??
因為啟動期間,第一個注冊的tick_device必然工作在TICKDEV_MODE_PERIODIC模式,所以tick_setup_periodic會設置clock_event_device的事件回調字段event_handler為tick_handle_periodic,工作一段時間后,就算有新的支持TICKDEV_MODE_ONESHOT模式的clock_event_device需要替換,再次進入tick_setup_device函數,tick_setup_oneshot的handler參數也是之前設置的tick_handle_periodic函數,所以我們考察tick_handle_periodic即可:
[cpp]?view plain?copy
void?tick_handle_periodic(struct?clock_event_device?*dev)??
{??
int?cpu?=?smp_processor_id();??
ktime_t?next;??
tick_periodic(cpu);??
if?(dev->mode?!=?CLOCK_EVT_MODE_ONESHOT)??
return;??
next?=?ktime_add(dev->next_event,?tick_period);??
for?(;;)?{??
if?(!clockevents_program_event(dev,?next,?false))??
return;??
if?(timekeeping_valid_for_hres())??
tick_periodic(cpu);??
next?=?ktime_add(next,?tick_period);??
}??
}??
該函數首先調用tick_periodic函數,完成tick事件的所有處理,如果是周期觸發模式,處理結束,如果工作在單觸發模式,則計算并設置下一次的觸發時刻,這里用了一個循環,是為了防止當該函數被調用時,clock_event_device中的計時實際上已經經過了不止一個tick周期,這時候,tick_periodic可能被多次調用,使得jiffies和時間可以被正確地更新。tick_periodic的代碼如下:
[cpp]?view plain?copy
static?void?tick_periodic(int?cpu)??
{??
if?(tick_do_timer_cpu?==?cpu)?{??
write_seqlock(&xtime_lock);??
/*?Keep?track?of?the?next?tick?event?*/??
tick_next_period?=?ktime_add(tick_next_period,?tick_period);??
do_timer(1);??
write_sequnlock(&xtime_lock);??
}??
update_process_times(user_mode(get_irq_regs()));??
profile_tick(CPU_PROFILING);??
}??
如果當前cpu負責更新時間,則通過do_timer進行以下操作:
更新jiffies_64變量;
更新墻上時鐘;
每10個tick,更新一次cpu的負載信息;
調用update_peocess_times,完成以下事情:
更新進程的時間統計信息;
觸發TIMER_SOFTIRQ軟件中斷,以便系統處理傳統的低分辨率定時器;
檢查rcu的callback;
通過scheduler_tick觸發調度系統進行進程統計和調度工作;
?











 工商網監
工商網監
評論