 電子發燒友App
電子發燒友App


摘要: 介紹了基于Xilinx Zynq7000芯片的柔性直流輸電橋臂控制器的設計方案。集成在Zynq7000芯片上的FPGA和ARM之間采用AXI4總線傳輸數據;配置芯片上的ARM雙核各自運行獨立的應用程序,移植了Linux操作系統;同時,基于Linux增加了HDMI圖形控制界面和SD卡數據記錄等功能。FPGA和ARM間的數據速率實測達到8.9 Gb/s,大大地提高了橋臂控制系統的實時性。
柔性直流輸電技術是基于電壓源換流器(VSC)的新一代直流輸電技術,通過控制IGBT的通斷來實現子模塊投切狀態的轉換。閥控系統的橋臂控制器根據接收到的子模塊16位電容電壓和32位狀態信息,生成子模塊控制指令,并下發到每個子模塊。由于子模塊的數量比較多(一個橋臂為576個子模塊),需要傳輸的數據量比較大(總共27.6 Kb),并且閥控系統對控制周期有嚴格的要求[1](控制過程嚴格控制在100 μs內)。
目前的橋臂控制器普遍采用DSP+FPGA的設計架構,FPGA將接收到的數據處理后傳送給DSP,DSP對數據進行故障判斷生成控制指令,FPGA讀取控制指令并通過光纖發送到子模塊。兩者之間采用32位數據總線進行數據交互,數據傳輸速率低于1Gb/s,傳輸子模塊數據大概需要30 μs,占用了控制周期較長的時間,降低了閥控系統的控制實時性。
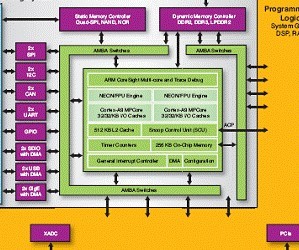
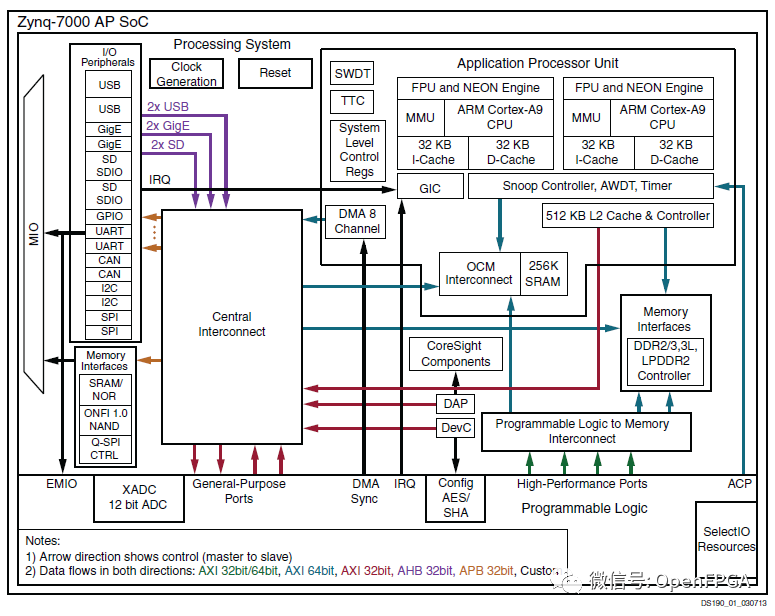
Xilinx的Zynq7000系列芯片將FPGA和ARM集成到一個芯片上,兩者之間可以通過64位的內存映射型AXI接口進行雙向數據傳輸,理論帶寬為9.6 Gb/s。ARM和FPGA直接通過AXI4數據總線進行通信,理論數據線寬度達到1 024位,對于突發長度,最多支持256位,能夠極大地提高FPGA和ARM的數據通信傳輸率,保證系統實時運行[2]。
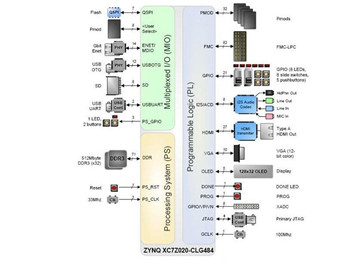
本文設計的橋臂控制器采用Zynq xc7z020芯片,使用AXI4總線取代了DSP+FPGA的數據總線,同時利用ARM 雙核CortexA9處理子系統和豐富的外設資源,進一步提升了橋臂控制器的功能。
1 系統總體結構設計
本文所設計的橋臂控制器由集成在Zynqxc7z020內的雙核ARM CortexA9 MPCore處理器(CPU0+CPU1)所控制,這兩個處理器可以同時運行各自獨立的操作系統和軟件程序,而且可以通過片內RAM進行通信。
為了保證ARM對FPGA中斷的實時響應,將CPU1配置為運行裸機程序,執行中斷服務函數,主要完成故障檢測和控制指令生成。而CPU0運行Linux操作系統,提供用戶控制圖形界面和網絡通信等功能。CPU0和CPU1通過片內256K的RAM進行數據通信,這種雙核架構稱為不對稱的多處理機系統(Asymmetric MultiProcessing,AMP)模式。
Zynqxc7z020芯片的FPGA接收到子模塊的電容電壓數據后,進行排序及冗余處理,然后利用AXI_Master_Connector的AXI總線IP核將數據轉換為AXI4總線數據格式,通過ARM與FPGA的64位AXI HP(High Performance)高速接口傳輸到外部的DDR3中,數據傳輸完畢后,FPGA向ARM的CPU1發送一個中斷請求。
ARM的CPU1接收到中斷后,從DDR3內存讀取數據并進行故障判斷處理,同時通知CPU0的Linux操作系統,在圖形界面實時顯示數據變化并通過網口向后臺發送事件信息。
CPU1數據處理完畢后,生成子模塊控制指令并寫入DDR3指定內存區,FPGA通過AXI_Master_Connector總線IP核從DDR3讀取數據,并通過光纖發送到每個子模塊。
運行Linux的CPU0作為主節點,提供HDMI圖形界面,并負責系統上電硬件初始化、啟動CPU1、將位配置文件燒寫到FPGA中和升級系統軟件等工作。方案的整體框架如圖1所示。

?
圖1 橋臂控制器系統框架圖
2 硬件平臺設計
橋臂控制器的硬件平臺主要分為ARM和FPGA兩部分。使用Xilinx XPS硬件設計軟件,配置Zynq處理器中ARM部分的外設,如圖2所示。

?
圖2 橋臂控制器ARM側外設配置
程序代碼和FPGA的配置文件固化在外部QuadSPI Flash中,Enet0用來與后臺進行網絡通信,SD0可以掛接SD卡,I2C0用來掛接RTC8564JE芯片,I2C1控制器配置HDMI輸出芯片Sil9134,系統使用UART1輸出調試信息。
FPGA部分的硬件平臺包括數據預處理的IP核、AXI總線控制IP核(IN_AXI_MASTER和OUT_AXI_MASTER),以及產生中斷的irq_gen_0 IP核,構建了FPGA、ARM和DDR3的數據流通道[3],如圖3所示。

?
圖3 橋臂控制器FPGA硬件設計
添加AXI總線控制IP核時,需指定AXI協議為AXI4,數據帶寬為64位(最高1 024位),并將ARM與FPGA的64位AXI HP接口映射到DDR3內存的高端1 MB地址(0x3FF0 0000~0x3FFF FFFF),用來存儲接收到的子模塊數據以及生成的控制指令[4]。
? ? ?
3 嵌入式軟件設計
Zynqxc7z020芯片是以ARM作為核心的,上電后的運行流程如下:
① 進入FSBL(First Stage Boot Loader),對電路板進行配置初始化;
② 將位文件燒入FPGA,FPGA按照位中的方式運行;
③ 進入SSBL(Second Stage Boot Loader),uboot初始化操作系統的運行環境,引導Linux內核,隨后將控制權交給雙核ARM中的CPU0,CPU0負責啟動響應FPGA中斷的CPU1。
3.1 FSBL軟件設計
FSBL主要完成Zynqxc7z020芯片的啟動、內存的初始化、I/O的中斷初始化,以及HDMI的配置。其中,HDMI接口芯片Sil9134通過IIC1來配置。
FSBL中I2C的主要C程序如下:
//初始化I2C控制器
XIicPs_LookupConfig(…);
XIicPs_CfgInitialize(…);
//設置I2C時鐘頻率
XIicPs_SetSClk(…);
//發送數據
iic_writex(… );
通過配置Sil9134的0x72基址和0x7A基址兩個寄存器,初始化芯片硬件,進入正常工作模式。
3.2 啟動AMP工作模式
Zynqxc7z020芯片的ARM雙核共享1G的DDR3內存、512K的L2 Cache和中斷控制器,為了避免雙核同時訪問這些資源導致沖突,系統采用了以下措施:
① 在CPU0上運行的Linux使用DDR3內存的低端768 MB空間,CPU1使用隨后的255 MB內存空間,高端的1 MB空間用來存儲FPGA讀寫的數據。
② CPU1禁用L2 Cache,CPU0上的Linux完全占用L2 Cache。
③ FPGA發送給CPU1的中斷使用私有中斷控制器,發送給CPU0的中斷使用共享中斷控制器,兩者互不干擾[5]。
Linux內核在CPU0啟動成功后,此時CPU1處于休眠狀態,會一直輪詢0xFFFF FFF0地址處的數值,非零就把讀取到的數值裝載到PC寄存器,跳轉到對應的地址執行指令。CPU0通過Linux的devmem命令把CPU1的DDR3內存起始地址0x3000 0000寫入0xFFFF FFF0,啟動CPU1:devmem 0xFFFF FFF0 0x3000 0000。
CPU1啟動后,在主函數注冊中斷服務函數,當FPGA的數據中斷發生時進入中斷函數,進行故障判斷并生成控制指令。因為CPU1運行的是裸機程序,其中斷響應時間要比運行Linux的CPU0響應時間短。
3.3 系統軟件升級
橋臂控制器在調試過程中經常需要對代碼進行升級,而程序代碼和FPGA的配置文件固化在外部QuadSPI Flash中,通過開啟CPU0上Linux的SSH和FTP服務,使用網口可以重新燒寫Flash中的文件,步驟如下:
① PC電腦通過FileZilla Client(Windows下的ftp工具)登錄Linux的ftp服務器,將新的燒寫文件上傳到Linux的文件系統下;
② PC電腦通過putty(Windows下的ssh工具)登錄Linux的root賬號;
③ 在putty界面下,使用Linux自帶的flashcp命令將上傳的文件燒寫到外部QuadSPI Flash。
橋臂控制器重啟后,系統軟件得到更新。
3.4 應用程序流程
系統程序流程如圖4所示。

?
圖4 系統程序流程圖
4 FPGA通信傳輸率測試
ARM和FPGA通過AXI4數據總線進行通信,數據帶寬最高達到1 024位,本文主要測試了64位突發傳輸率。
對于64位突發傳輸,分別測試FPGA工作頻率為50 MHz、100 MHz和150 MHz時,FPGA發送256個64位數據的用時,如表1所列。
表1 FPGA發送64位數據時間

?
由表1可以計算得出不同FPGA工作頻率下,數據位寬為64位時的傳輸速率,如表2所列。
表2 FPGA數據傳輸速率
由表2可見,使用Zynqxc7z020芯片能夠極大提高FPGA和ARM的數據傳輸速率。
結語
本文設計的橋臂控制器,采用Xilinx Zynqxc7z020芯片,使用AXI總線取代了以前的DSP+FPGA數據總線方式,實測的最高數據傳輸率達到8.9 Gb/s,極大地改善了閥控系統數據通信的實時性,同時簡化了控制板卡的硬件設計,降低了板卡功耗,提升了系統的運行穩定性[6]。
利用芯片上集成的ARM CortexA9 MPCore雙核處理器,搭建了AMP多系統架構,在保證系統實時響應FPGA中斷的同時,移植了Linux操作系統,提供了人機交互界面,為橋臂控制器添加了新的控制功能,簡化了柔性直流輸電閥控系統的整體設計。
參考文獻
[1] 周楊. 基于模塊化多電平換流技術的柔性直流輸電系統研究[D]. 杭州:浙江大學, 2013.
[2] 王瑩. Xilinx可擴展處理平臺:ZYNQ嵌入式處理器與FPGA集成的獨特創舉[J]. 電子產品世界,2012(2).
[3] Zynq7000:SOC平臺[J].世界電子元器件,2012(12):2424.
[4] 楊定定.基于AXI總線的MicroBlaze雙核SoPC系統設計[J].電子產品世界,2012,19(1):7677.
[5] 王可,黃曉華.基于ARM Cortex的視覺導航AGV雙核控制器設計[J].機電工程,2013,30(10):12841287.
[6] 胥京宇.賽靈思推出可擴展處理平臺Zynq7000系列[J].世界電子元器件,2011(4):5959.
滕林陽(研究生),研究方向為嵌入式系統在電力系統自動化中的應用。

















 工商網監
工商網監
評論