真的能在短時(shí)間內(nèi)摸清一個(gè)行業(yè)嗎?這里為大家整理的行業(yè)產(chǎn)業(yè)鏈全景圖。一起來(lái)看一看吧!
2017-10-23 09:20:34 90483
90483 理論知識(shí),因此初學(xué)者也能輕松跟著步驟實(shí)現(xiàn)。 項(xiàng)目所需設(shè)備 硬件: 樹莓派 3 Model B; 樹莓派攝像頭模塊(PiCam)。 語(yǔ)言和庫(kù): OpenCV Python 3 步驟 本文主要講述如何使用 PiCam 實(shí)現(xiàn)實(shí)時(shí)人臉識(shí)別,如下圖所示: 本教程使用 OpenCV 完成,一個(gè)神奇的「開源計(jì)算機(jī)視覺
2018-03-06 09:00:0150737 作者:Harvest Guo來(lái)源:Xilinx DSP Specilist 本文通過(guò)對(duì)OpenCV中圖像類型和函數(shù)處理方法的介紹,通過(guò)設(shè)計(jì)實(shí)例描述在vivadoHLS中調(diào)用OpenCV庫(kù)函數(shù)實(shí)現(xiàn)圖像
2021-04-23 11:32:025620 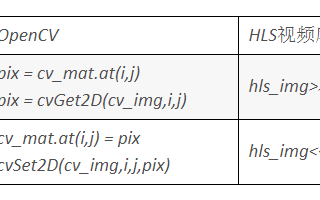
立體的圖像展現(xiàn)出來(lái),如圖3右,駕駛員通過(guò)顯示圖像可以清晰判斷位于車輛左后方的人所在位置。圖4:富士通獨(dú)特的“碗狀”全景圖像拼接技術(shù)。富士通OmniView 360°全景3D視頻成像系統(tǒng)使用面朝
2014-08-26 16:28:47
的軟硬件積木平臺(tái),深度集成了AliOS Things物聯(lián)網(wǎng)操作系統(tǒng)、HaaS輕應(yīng)用、釘釘小程序和阿里云物聯(lián)網(wǎng)平臺(tái)等技術(shù)和服務(wù),讓開發(fā)者可以輕松的學(xué)習(xí)和開發(fā)云釘端全鏈路實(shí)戰(zhàn)項(xiàng)目,解決實(shí)際場(chǎng)景,或孵化創(chuàng)新應(yīng)用,下圖是其全景圖:圖1 HaaS EDU K1全景圖HaaS EDU K1 六大特點(diǎn):高顏值 .
2021-07-23 07:30:00
現(xiàn)在網(wǎng)上一般關(guān)于LabVIEW做視覺常規(guī)會(huì)用到NI Vision工具包,以及openCV的動(dòng)態(tài)鏈接庫(kù),實(shí)現(xiàn)LabVIEW調(diào)用openCV的功能,但是NI Vision工具包除非破解,正版要燒錢
2021-12-07 20:59:33
本文通過(guò)對(duì)OpenCV中圖像類型和函數(shù)處理方法的介紹,通過(guò)設(shè)計(jì)實(shí)例描述在vivadoHLS中調(diào)用OpenCV庫(kù)函數(shù)實(shí)現(xiàn)圖像處理的幾個(gè)基本步驟,完成從OpenCV設(shè)計(jì)到RTL轉(zhuǎn)換綜合的開發(fā)流程。開源
2021-07-08 08:30:00
本人是個(gè)小白一直在求labview的兩張或多張圖片拼接,就像相機(jī)全景一樣,但是一直都找不到。網(wǎng)上只有一個(gè)垂直的拼接,但是我想要個(gè)橫向的拼接。不過(guò)我又找到了一個(gè)圖像旋轉(zhuǎn)的程序。我想兩個(gè)結(jié)合在一起應(yīng)該
2024-03-08 09:45:43
方法,一種是lemaker官方提供的Opencv安裝包,另一種則普遍使用的方法。下面看具體步驟:方法一步驟1:添加Lemuntu更新源方法:獲取并保存Keywget http
2016-02-25 12:49:48
申請(qǐng)理由:給一些公司做過(guò)Android開發(fā)項(xiàng)目,專業(yè)是電氣工程最近在做小車想將移動(dòng)端和自己的設(shè)計(jì)連接到一塊更好的實(shí)現(xiàn)人工智能化項(xiàng)目描述:在手機(jī)端上以全景圖的形式顯示小車所采回的信息,同時(shí)實(shí)現(xiàn)客戶端直接控制小車的運(yùn)行
2015-07-30 10:05:37
申請(qǐng)理由:給一些公司做過(guò)Android開發(fā)項(xiàng)目,專業(yè)是電氣工程最近在做小車想將移動(dòng)端和自己的設(shè)計(jì)連接到一塊更好的實(shí)現(xiàn)人工智能化項(xiàng)目描述:在手機(jī)端上以全景圖的形式顯示小車所采回的信息,同時(shí)實(shí)現(xiàn)客戶端直接控制小車的運(yùn)行
2015-07-30 10:08:32
本帖最后由 jj1989 于 2016-12-3 20:56 編輯
在上一篇文章中,介紹了USB攝像頭的使用,這次介紹一下OpenCV的簡(jiǎn)單使用,以打開一張圖片為例。一、OpenCV簡(jiǎn)介
2016-12-03 20:56:40
申請(qǐng)理由:希望能設(shè)計(jì)款汽車全景系統(tǒng),能夠實(shí)現(xiàn)4路以上攝像頭的圖像集合項(xiàng)目描述:系統(tǒng)采用多路攝像頭構(gòu)成全景圖像,初步目標(biāo)為采集圖像并在屏幕上分區(qū)顯示,在此基礎(chǔ)上完成圖像的拼接和組合,能夠實(shí)現(xiàn)采集圖像的無(wú)縫拼接,形成直觀的有利于司機(jī)觀察的全景圖像。
2015-08-01 17:13:45
與遠(yuǎn)程監(jiān)控。硬件部分:使用ARM cortex A8處理器,GPS/北斗雙定位模塊,4個(gè)廣角攝像頭,3G模塊等軟件部分:全景圖像合成算法優(yōu)化與移植,opencv嵌入式平臺(tái)的移植
2015-07-19 19:42:46
先上此次全景圖APP界面總得來(lái)說(shuō)還是比較好的,手勢(shì)的加入讓項(xiàng)目增加了許多色彩。具體解說(shuō)請(qǐng)看視頻演示視頻:獻(xiàn)上代碼:試用板代碼:QT代碼:
2017-01-24 16:59:54
申請(qǐng)理由:給一些公司做過(guò)多個(gè)Android項(xiàng)目,專業(yè)是電氣工程最近在做小車項(xiàng)目描述:在手機(jī)端上以全景圖的形式顯示小車所采回的信息,同時(shí)實(shí)現(xiàn)客戶端直接控制小車的運(yùn)行
2015-07-30 10:01:48
給予這個(gè)試用的機(jī)會(huì)。如果能夠通過(guò)申請(qǐng)我也會(huì)及時(shí)把代碼和試用心得與大家分享項(xiàng)目描述:小型零件的360°全景圖像捕獲識(shí)別及檢驗(yàn),利用3~5個(gè)精密攝像頭從不同的方向獲取小型零件的圖像,與預(yù)先已經(jīng)指定的合格零件進(jìn)行匹配,一致則為合格零件,不一致則為不合格零件。合格零件的圖像特征預(yù)先儲(chǔ)存于板上ROM
2016-03-04 09:38:40
原生js實(shí)現(xiàn)移動(dòng)端Touch輪播圖的方法步驟
2020-06-08 14:43:13
和大小,得到當(dāng)前幀中目標(biāo)的尺寸和質(zhì)心位置。在介紹Intel公司的開源OpenCV計(jì)算機(jī)視覺庫(kù)的基礎(chǔ)上,采用CAMSHIFT跟蹤算法,實(shí)現(xiàn)運(yùn)動(dòng)目標(biāo)跟蹤,解決了跟蹤目標(biāo)發(fā)生存在旋轉(zhuǎn)或部分遮擋等復(fù)雜情況下的跟蹤
2014-12-23 14:21:51
目標(biāo)跟蹤算法作為一種有著非常廣泛的應(yīng)用的算法,在航空航天、智能交通、智能設(shè)備等領(lǐng)域有著非常廣泛的應(yīng)用。本系列博客將教大家在410c開發(fā)板上基于linux操作系統(tǒng)環(huán)境,采用QT+Opencv來(lái)實(shí)現(xiàn)
2018-09-21 10:42:31
的應(yīng)用空間。結(jié)合5G網(wǎng)絡(luò)和WiFi6可實(shí)現(xiàn)8K視頻圖傳,結(jié)合NPU可實(shí)現(xiàn)Al視頻分析功能,結(jié)合加速傳感器和其他通訊端口便可打造VR全景頭盔和單兵頭盔。 采用RK3588打造全景攝像機(jī)將有利于控制
2022-07-26 16:29:17
用12個(gè)鏡頭拍攝圖片然后用單片機(jī)拼接可得到全景圖而不是通過(guò)后期制作
2013-11-30 22:14:03
目前,全景技術(shù)的研究主要將注意力集中在集合變換算法和鏡頭矯正算法的改進(jìn),對(duì)實(shí)時(shí)性問(wèn)題研究較少。本系統(tǒng)利用FPGA對(duì)圓形極坐標(biāo)圖像進(jìn)行實(shí)時(shí)展開。
2019-08-29 08:20:27
。CityBuilder 致力于幫助用戶快速搭建城市 3D 場(chǎng)景,并支持應(yīng)用于開發(fā)環(huán)境中,為團(tuán)隊(duì)有效地降低開發(fā)門檻、縮短開發(fā)周期、減少開發(fā)成本。來(lái)選擇你的城市范圍開搭吧~打開指定全景圖.js/** * 說(shuō)明:畫點(diǎn)
2019-12-26 16:07:50
通過(guò)Android實(shí)現(xiàn)簡(jiǎn)單的VR全景圖
2019-02-12 11:53:28
到達(dá)指定區(qū)域,并通過(guò)搭載的先進(jìn)傳感器獲取高分辨率的影像數(shù)據(jù)。這些數(shù)據(jù)經(jīng)過(guò)處理后,可以生成三維全景圖,為管理者提供直觀、準(zhǔn)確的空域信息。
二、提升空域管理效率的關(guān)鍵
傳統(tǒng)的空域管理方法往往依賴于地面設(shè)施
2024-02-20 15:23:56
智能車創(chuàng)意組識(shí)別圖an用openmv 還是用 opencv 比較好
2023-10-24 06:24:31
的場(chǎng)合,如大范圍的公共場(chǎng)所、交通樞鈕、交通路口。由于這些地方視野開闊,寬度有些甚至達(dá)到在百米以上,在看清全景圖像實(shí)現(xiàn)調(diào)度的同時(shí),不可能也沒有精力再看清車輛牌照號(hào)碼等細(xì)節(jié)。這些場(chǎng)合只需要在制高點(diǎn)安裝一臺(tái)
2016-05-23 10:30:26
本帖最后由 kohillyang 于 2014-7-14 16:21 編輯
先是單片機(jī)的電路:然后是晶振電路和復(fù)位電路:然后是電機(jī)驅(qū)動(dòng)的電路然后是ISP下載電路最后是并轉(zhuǎn)串口的芯片最后來(lái)一張全景圖吧
2014-07-14 16:15:57
處理算法呈現(xiàn)給駕駛員的是LCD上清楚顯示的車周全景圖像,實(shí)現(xiàn)身臨其境的視覺效果;結(jié)合智能識(shí)別技術(shù)實(shí)現(xiàn)包括分界線識(shí)別、路基識(shí)別、各種安全標(biāo)示識(shí)別在內(nèi)的主動(dòng)安全功能。。。如果充分結(jié)合雷達(dá)探測(cè)技術(shù)以及汽車電機(jī)
2011-06-14 16:15:27
眼全景攝像機(jī)是對(duì)現(xiàn)有監(jiān)控系統(tǒng)的改造與升級(jí)。在魚眼全景監(jiān)控系統(tǒng)中,只需要一臺(tái)魚眼全景攝像機(jī)即可實(shí)現(xiàn)全景無(wú)盲區(qū)監(jiān)控,沒有任何的機(jī)械部件,圖像通過(guò)超廣角的魚眼鏡頭攝取監(jiān)控現(xiàn)場(chǎng)的全景圖像,根據(jù)安裝方式
2013-08-07 10:21:31
的全景鳥瞰圖。 駕駛員通過(guò)鳥瞰圖,可直觀地看到車輛所處的位置以及 車輛周圍的障礙物,從容操控車輛泊車入位或通過(guò)復(fù)
2022-01-14 18:20:55
IBR 技術(shù)不僅可以彌補(bǔ)傳統(tǒng)基于幾何繪制技術(shù)的不足,而且能給出更豐富的圖像顯示。論文從工程實(shí)際應(yīng)用的角度出發(fā),提出并實(shí)現(xiàn)了一種圖像拼接的新方法。該方法即可用于全景控
2009-06-06 13:44:30 11
11 閥的種類特性及其選用步驟簡(jiǎn)介
1.前言 閥用于管路系統(tǒng)中,處理液體之控制裝置,選擇閥的第一步驟是必須了解各種閥之功能及我們所希冀的閥,在裝妥
2009-07-04 08:13:4660 三維全景圖像技術(shù)(Integral Imaging,簡(jiǎn)稱II)是一種采用微透鏡陣列進(jìn)行記錄和顯示的三維圖像技術(shù)。該技術(shù)目前正成為最有希望實(shí)現(xiàn)下一代三維
2009-09-10 09:43:5437 為了實(shí)現(xiàn)對(duì)高分辨率折反射全景的快速處理,采用DSP+FPGA 異構(gòu)雙核結(jié)構(gòu)、多級(jí)乒乓緩存的數(shù)據(jù)通信機(jī)制,基于查找表技術(shù)和分塊預(yù)取策略的全景圖像展開算法等,開發(fā)了一個(gè)可對(duì)300
2009-11-20 15:44:5712 本文介紹了一種以DM642芯片為核心的嵌入式全景圖像處理系統(tǒng),該系統(tǒng)采集全景相機(jī)輸出的圖像,經(jīng)過(guò)柱面展開后,通過(guò)VGA顯示器顯示給用戶。給出了此系統(tǒng)的硬件結(jié)構(gòu)設(shè)計(jì),柱
2010-01-13 15:35:3514 虛擬現(xiàn)實(shí)技術(shù)在航空航天、機(jī)器人遙操作和生物醫(yī)學(xué)等領(lǐng)域得到了廣泛應(yīng)用,已成為研究
問(wèn)題的一種重要手段,全景圖像的拼接技術(shù)則是其中一個(gè)非常重要的環(huán)節(jié)
2010-08-29 15:57:420 試想一下,導(dǎo)航在畢加索描繪的世界里會(huì)是什么情形?Maxim Integrated Products, Inc. (NASDAQ: MXIM)的最新視頻介紹了全景可視系統(tǒng)如何將多路魚眼攝像頭輸入轉(zhuǎn)換為車身周邊的全景圖。
2015-09-22 17:38:53758 基于FPGA的高分辨率全景圖像處理平臺(tái)基于FPGA的高分辨率全景圖像處理平臺(tái)
2015-11-04 16:30:452 opencv備忘單,opencv_cheatsheet,opencv_tutorials,opencv_user,opencv2refman2
2016-08-25 15:52:390 基于FPGA的折反射全景圖像查表實(shí)時(shí)展開
2016-09-22 12:41:479 車輛。 魚眼鏡頭具有超寬視角特性,性價(jià)比較高,在汽車成像系統(tǒng)中得到了越來(lái)越廣泛的應(yīng)用。一種應(yīng)用是呈現(xiàn)車輛周圍 360 全景圖像,通過(guò)將魚眼鏡頭陣列采集到的多幅圖像拼接起來(lái)實(shí)現(xiàn)這一功能。這為駕駛員提供了車輛周圍的全景圖像,幫助他們更輕松的駕駛車輛。由于魚眼鏡
2017-09-07 14:01:447 針對(duì)全景圖像鑲嵌中累積誤差的問(wèn)題,提出了一種基于多次柱面投影的變換基準(zhǔn)圖策略。首先,為了將累積誤差有效地分散到各相鄰圖像之間,并減少柱面投影變換的計(jì)算量,算法利用相位相關(guān)和多分辨率分解法對(duì)柱面投影
2017-11-24 15:57:450 估計(jì),接著采用直接法對(duì)各幀與全景圖間的運(yùn)動(dòng)參數(shù)進(jìn)行精確調(diào)整,最后運(yùn)用自適應(yīng)中值濾波繪制出全景圖。實(shí)驗(yàn)結(jié)果表明,該方法能夠生成較高質(zhì)量的全景圖,基本能實(shí)現(xiàn)無(wú)縫連接。
2018-03-02 16:17:140 VR全景也稱為全景攝影或3D實(shí)景,是基于靜態(tài)圖像的虛擬現(xiàn)實(shí)技術(shù)。它是把相機(jī)環(huán)360拍攝的一組照片拼接成一個(gè)全景圖像,用一個(gè)專用的播放軟件在互聯(lián)網(wǎng)上顯示,讓使用者能用鼠標(biāo)控制環(huán)視的方向
2018-03-30 10:32:003677 觀看視頻,了解OpenCV庫(kù)和其在一些典型應(yīng)用中的使用,以及Zynq-7000 SoC的優(yōu)點(diǎn)和如何實(shí)現(xiàn)OpenCV設(shè)計(jì)。同時(shí)您還能學(xué)習(xí)到如何在設(shè)計(jì)流程中使用HLS和視頻庫(kù)文件。本教程將
通過(guò)一個(gè)設(shè)計(jì)實(shí)例向您講解以上內(nèi)容。
2018-11-20 06:46:003600 OpenCV是一個(gè)跨平臺(tái)的計(jì)算機(jī)視覺庫(kù),可以運(yùn)行在Windows、Linux、MacOS等操作系統(tǒng)上。OpenCV提供了眾多語(yǔ)言的接口,其中就包含了Python,Python是一門上手容易、使用起來(lái)十分讓人愉悅的語(yǔ)言,利用Python學(xué)習(xí)OpenCV,相信能更快的獲得效果。
2019-04-12 15:30:011473 VR全景是基于全景圖像的真實(shí)場(chǎng)景虛擬現(xiàn)實(shí)技術(shù),是VR全景虛擬現(xiàn)實(shí)技術(shù)中非常核心的部分。全景是就是把相機(jī)環(huán)360度拍攝的一組或多組照片拼接成一個(gè)全景平面圖像,然后通過(guò)計(jì)算機(jī)技術(shù)實(shí)現(xiàn)全方位互動(dòng)式觀看的真實(shí)場(chǎng)景還原展示方式,而再加上VR虛擬現(xiàn)實(shí)技術(shù)是一種可以創(chuàng)建和體驗(yàn)虛擬世界的計(jì)算機(jī)仿真系統(tǒng)。
2019-07-14 09:40:394152 VR全景是基于全景圖像的真實(shí)場(chǎng)景虛擬現(xiàn)實(shí)技術(shù),是VR全景虛擬現(xiàn)實(shí)技術(shù)中非常核心的部分。全景是就是把相機(jī)環(huán)360度拍攝的一組或多組照片拼接成一個(gè)全景平面圖像,然后通過(guò)計(jì)算機(jī)技術(shù)實(shí)現(xiàn)全方位互動(dòng)式觀看的真實(shí)場(chǎng)景還原展示方式。
2019-09-03 15:27:13779 我們知道VR即是虛擬現(xiàn)實(shí),是移動(dòng)互聯(lián)網(wǎng)時(shí)代,通過(guò)手機(jī)端展示的一種技術(shù),而全景是把相機(jī)環(huán)360度拍攝的一組或多組照片拼接成一個(gè)全景圖像,通過(guò)計(jì)算機(jī)技術(shù)實(shí)現(xiàn)全方位互動(dòng)式觀看的真實(shí)場(chǎng)景還原展示方式。
2019-10-14 09:50:521443 虛擬現(xiàn)實(shí)全景圖是基于全景圖像的真實(shí)場(chǎng)景虛擬現(xiàn)實(shí)技術(shù),是虛擬現(xiàn)實(shí)技術(shù)的核心部分。全景(英文名稱為Panorama)是一種真實(shí)場(chǎng)景恢復(fù)和顯示方法,將相機(jī)環(huán)720度拍攝的一組或多組照片組合成全景圖像,并通過(guò)計(jì)算機(jī)技術(shù)實(shí)現(xiàn)全方位的交互式觀看。
2019-12-26 17:52:495631 1月14日消息,上任不久的小米副總裁常程曬出小米公司的技術(shù)全景圖。
2020-01-14 11:53:321963 美國(guó)宇航局(NASA)在周三發(fā)布了一張巨大的火星全景照片,這些照片是好奇號(hào)探測(cè)器在2019年末拍攝的,這是美國(guó)宇航局迄今為止制作的最高分辨率的火星全景圖。
2020-03-06 14:54:253833 隨著5G網(wǎng)絡(luò)的發(fā)展,現(xiàn)在有越來(lái)越多的VR全景圖。現(xiàn)在可以使用計(jì)算機(jī)仿真來(lái)生成三維虛擬世界,從而為用戶提供有關(guān)視覺,聽覺和觸覺的仿真。經(jīng)驗(yàn)一般。
2020-03-15 16:58:003460 虛擬全景又稱三維全景虛擬現(xiàn)實(shí)(也稱實(shí)景虛擬)是基于全景圖像的真實(shí)場(chǎng)景虛擬現(xiàn)實(shí)技術(shù)。全景(英文名稱是 Panorama)是把相機(jī)環(huán)360 度拍攝的一組或多組照片拼接成一個(gè)全景圖像,通過(guò)計(jì)算機(jī)技術(shù)實(shí)現(xiàn)全方位互動(dòng)式觀看的真實(shí)場(chǎng)景還原展示方式。
2020-06-15 11:30:493344 電池產(chǎn)業(yè)鏈全景圖 鋰電池產(chǎn)業(yè)鏈全景圖 氫燃料電池產(chǎn)業(yè)鏈全景圖 燃料電池催化劑產(chǎn)業(yè)鏈結(jié)構(gòu)圖 燃料電池膜產(chǎn)業(yè)鏈結(jié)構(gòu)圖 燃料電池產(chǎn)業(yè)鏈結(jié)構(gòu)圖 鋰電池負(fù)極材料產(chǎn)業(yè)鏈結(jié)構(gòu)圖 硅碳負(fù)極材料產(chǎn)業(yè)鏈結(jié)構(gòu)圖 動(dòng)力電池
2020-10-26 14:07:3124953 工業(yè)互聯(lián)網(wǎng)產(chǎn)業(yè)鏈全景圖 工業(yè)互聯(lián)網(wǎng)產(chǎn)業(yè)鏈可分為設(shè)備層、網(wǎng)絡(luò)層、平臺(tái)層、軟件層、應(yīng)用層和安全體系等六大部分構(gòu)成;其中:設(shè)備層是指包括智能生產(chǎn)設(shè)備、生產(chǎn)現(xiàn)狀智能終端、嵌入式軟件及工業(yè)數(shù)據(jù)中心;網(wǎng)絡(luò)
2020-12-08 14:18:356828 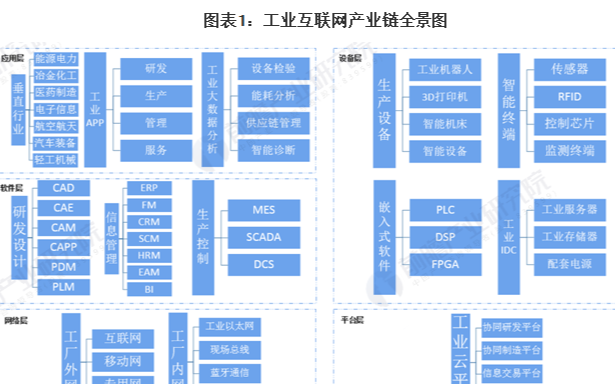
華為云還發(fā)布云原生2.0全景圖,其中,在應(yīng)用敏捷層,華為云將云原生的全棧能力賦能客戶,幫助客戶應(yīng)用敏捷、業(yè)務(wù)智能,安全可信,面向未來(lái)持續(xù)演進(jìn)。
2020-12-22 14:35:272664 為了迎接這個(gè)美好的“信息”新時(shí)代,物聯(lián)網(wǎng)智庫(kù)首次發(fā)布“5G產(chǎn)業(yè)地圖”——《2021年5G產(chǎn)業(yè)全景圖譜》和《2021年5G產(chǎn)業(yè)全景圖譜報(bào)告》,以展示5G各個(gè)版塊的發(fā)展進(jìn)程及主要推動(dòng)力量,并通過(guò)觀察5G參與者行為,挖掘5G產(chǎn)業(yè)發(fā)展的內(nèi)在邏輯,動(dòng)態(tài)的展現(xiàn)5G產(chǎn)業(yè)全景生態(tài)。
2021-01-11 15:04:363581 ? 1月7日,在“2020 AIoT產(chǎn)業(yè)年終盛典”上,物聯(lián)網(wǎng)智庫(kù)正式發(fā)布全新升級(jí)版的《2021中國(guó)AIoT產(chǎn)業(yè)全景圖譜報(bào)告》! 安恒信息作為安全賦能者、信任連接者和生態(tài)構(gòu)建者,將物聯(lián)網(wǎng)安全作為公司
2021-01-15 10:05:451812 近日,微納點(diǎn)石孵化項(xiàng)目圓周率科技與百度VR建立合作,雙方攜手打通全景圖片剪輯與分享功能,現(xiàn)只需一臺(tái)圓周率全景相機(jī)+百度VR·內(nèi)容平臺(tái),便可輕松實(shí)現(xiàn)多場(chǎng)景全景內(nèi)容精彩創(chuàng)作。 ? ? 圓周率Pilot
2021-01-18 09:27:502126 為設(shè)計(jì)嵌入式折反射全景實(shí)時(shí)成像系統(tǒng),在FPGA上通過(guò)查表實(shí)現(xiàn)折反射全景圖像展開,并結(jié)合FPGA特點(diǎn)。采用圖像分塊展開、時(shí)間隱藏?cái)?shù)據(jù)讀寫技術(shù)、FPGA流水線等方法提高展開速度。實(shí)驗(yàn)表明,將1024
2021-02-02 15:52:003 北京四度科技通過(guò)計(jì)算機(jī)技術(shù)實(shí)現(xiàn)全方位互動(dòng)式觀看的真實(shí)場(chǎng)景還原展示方式。虛擬全景又稱三維全景虛擬現(xiàn)實(shí)(也稱實(shí)景虛擬)基于全景圖像的真實(shí)場(chǎng)景虛擬現(xiàn)實(shí)技術(shù)。全景(英文名稱是Panorama把相機(jī)環(huán)360度拍攝的一組或多組照片拼接成一個(gè)全景圖像。
2021-03-23 11:26:36970 2021年3月25日,安全牛第八版中國(guó)網(wǎng)絡(luò)安全行業(yè)全景圖(基于2020年度數(shù)據(jù)申報(bào)收錄)正式發(fā)布。安全牛全景圖報(bào)告展現(xiàn)了當(dāng)前我國(guó)網(wǎng)絡(luò)安全產(chǎn)業(yè)的發(fā)展?fàn)顩r和企業(yè)能力,是甲方用戶、安全廠商、投資機(jī)構(gòu)和業(yè)界
2021-03-30 11:29:223696 
2021年7月,數(shù)說(shuō)安全正式發(fā)布《2021年中國(guó)網(wǎng)絡(luò)安全市場(chǎng)全景圖》,天威誠(chéng)信憑借在電子認(rèn)證領(lǐng)域的技術(shù)優(yōu)勢(shì)與產(chǎn)品實(shí)力入選“身份與訪問(wèn)管理”場(chǎng)景中的“身份認(rèn)證與權(quán)限管理”、“數(shù)字證書”兩個(gè)版塊
2021-07-26 12:04:251435 
vr虛擬展示VR全景現(xiàn)在可以展示的渠道非常之多,是基于全景圖像的真實(shí)場(chǎng)景虛擬現(xiàn)實(shí)技術(shù),例如展會(huì),傳統(tǒng)的線下展廳基本都只是通過(guò)設(shè)計(jì)來(lái)創(chuàng)造視覺感,商迪3D可以利用3D建模技術(shù)+VR全景技術(shù)再插入視頻及圖文解說(shuō),將產(chǎn)品搬到線上利用虛擬展館,實(shí)現(xiàn)與線下參觀完全一樣的感官體驗(yàn)。
2022-02-15 10:53:062451 文章從實(shí)際出發(fā),講述了什么是傅里葉變換,它的理論基礎(chǔ)以及Numpy和OpenCV實(shí)現(xiàn)傅里葉和逆傅里葉變換,并最終用高通濾波和低通濾波的示例。
2022-07-05 16:04:201206 首先需要用全景拍攝的模式拍出真實(shí)的展館全景圖; 其次,要高清展示的館內(nèi)產(chǎn)品的圖片,開發(fā)介紹視頻語(yǔ)音功能,不同方位的熱點(diǎn)展示這些內(nèi)容; 再者需要開發(fā)全景漫游功能,讓參觀者可以隨時(shí)隨地在虛擬場(chǎng)景中自由
2022-09-02 13:21:20448 本文首先對(duì)全景圖像的成像進(jìn)行了分析,緊接著對(duì)現(xiàn)有的在全景圖像上的卷積方式進(jìn)行了分類介紹,并對(duì)現(xiàn)有的全景圖像數(shù)據(jù)集進(jìn)行了收集并介紹。作為第一篇全面回顧和分析深度學(xué)習(xí)方法在全景圖像應(yīng)用上的綜述,我們匯總
2022-10-19 15:25:081068 的圖像,目標(biāo)是“縫合”它們并創(chuàng)建一個(gè)全景圖像場(chǎng)景。當(dāng)然也可以是給定多張圖像,但是總會(huì)轉(zhuǎn)換成兩張共享某些公共區(qū)域圖像拼接的問(wèn)題,因此本文以最簡(jiǎn)單的形式進(jìn)行介紹。
2022-10-26 15:59:361479 特斯拉供應(yīng)鏈全景圖: 審核編輯?黃昊宇 ?
2022-11-17 20:29:26918 ?? 達(dá)實(shí)智能受邀參加本次大會(huì) 自主研發(fā)的達(dá)實(shí)AIoT智能物聯(lián)網(wǎng)管控平臺(tái)實(shí)力入選中國(guó)AIoT產(chǎn)業(yè)全景圖譜? 成為AIoT產(chǎn)業(yè)代表企業(yè) 并憑借創(chuàng)新驅(qū)動(dòng)的企業(yè)文化榮獲AIoT新維獎(jiǎng)“企業(yè)創(chuàng)新力榜”? ? ? (《2023年中國(guó)AIoT產(chǎn)業(yè)全景圖譜》發(fā)布,達(dá)實(shí)入選“云”板塊) ? ?
2022-12-08 13:56:451103 在此次年會(huì)上,摯物AIoT產(chǎn)業(yè)研究院聯(lián)合物聯(lián)網(wǎng)智庫(kù)正式發(fā)布了全新升級(jí)版的《2023中國(guó)AIoT產(chǎn)業(yè)全景圖譜報(bào)告》,在圖譜中,發(fā)布方將AIoT產(chǎn)業(yè)劃分為“端”、“邊”、“管”、“云”、“用”、“產(chǎn)業(yè)服務(wù)”六大板塊,規(guī)劃出清晰明了的“產(chǎn)業(yè)地圖”。
2022-12-09 15:25:05654 。 ? 星縱物聯(lián)受邀參會(huì),并在現(xiàn)場(chǎng)展示5G系列產(chǎn)品、LoRaWAN?傳感器、網(wǎng)關(guān)、控制器等全系列產(chǎn)品,受到了多方關(guān)注。 ? 星縱物聯(lián)產(chǎn)品受到現(xiàn)場(chǎng)參會(huì)人員青睞 ? 在此次年會(huì)上,摯物AIoT產(chǎn)業(yè)研究院聯(lián)合物聯(lián)網(wǎng)智庫(kù)正式發(fā)布了全新升級(jí)版的《2023中國(guó)AIoT產(chǎn)業(yè)全景圖譜報(bào)告》,
2022-12-14 17:57:57483 
后臺(tái)建模包括兩個(gè)主要步驟,后臺(tái)初始化和后臺(tái)更新,背景減除在OpenCV中的是cv::BackgroundSubtractor類,
2023-01-18 15:15:00822 
近日,深圳市網(wǎng)絡(luò)與信息安全行業(yè)協(xié)會(huì)正式發(fā)布《2023年網(wǎng)絡(luò)與信息安全行業(yè)全景圖》(以下簡(jiǎn)稱“全景圖”),為我國(guó)網(wǎng)絡(luò)安全行業(yè)主管部門、行業(yè)企業(yè)、從業(yè)者、產(chǎn)品及服務(wù)使用者以及資本機(jī)構(gòu)提供借鑒
2023-02-16 09:15:56289 字化轉(zhuǎn)型領(lǐng)域的研究成果,并對(duì)2023年的數(shù)字化轉(zhuǎn)型發(fā)展趨勢(shì)進(jìn)行了深度探討。 與此同時(shí),會(huì)議上發(fā)布的《鑄基計(jì)劃-高質(zhì)量數(shù)字化轉(zhuǎn)型產(chǎn)品及服務(wù)全景圖(2022)》(以下簡(jiǎn)稱“全景圖”)備受行業(yè)關(guān)注。陽(yáng)光雨露作為數(shù)字化轉(zhuǎn)型供給側(cè)企業(yè),憑借
2023-03-10 15:31:29588 
自連科技作為醫(yī)療物聯(lián)網(wǎng)技術(shù)核心供應(yīng)商,通過(guò)一體化產(chǎn)品體系及解決方案,逐步構(gòu)建全生命健康智能物聯(lián)技術(shù)全景圖。
2023-04-06 15:38:00755 通過(guò)一個(gè)偶然機(jī)會(huì),我了解到了人體姿態(tài)解算,在學(xué)習(xí)K210之余,我便想著通過(guò)opencv實(shí)現(xiàn)這個(gè)功能,查找了很多資料,發(fā)現(xiàn)可以利用opencv+openpose實(shí)現(xiàn),接著我又開始找一些資料,在pycharm上部署。
2023-05-22 10:44:23715 
近日,在中央網(wǎng)信辦、湖北省人民政府指導(dǎo),武漢市人民政府主辦的首屆武漢網(wǎng)絡(luò)安全創(chuàng)新論壇上,數(shù)說(shuō)安全正式發(fā)布了《2023年中國(guó)網(wǎng)絡(luò)安全市場(chǎng)全景圖》(以下簡(jiǎn)稱“全景圖”)。芯盾時(shí)代憑借領(lǐng)先的產(chǎn)品方案、優(yōu)異
2023-05-24 20:08:03177 
近日,AIoT產(chǎn)業(yè)研究院聯(lián)合物聯(lián)網(wǎng)智庫(kù)正式發(fā)布全新升級(jí)版《2022中國(guó)AIoT產(chǎn)業(yè)全景圖譜報(bào)告》。利爾達(dá)憑借在“端”側(cè)的優(yōu)異成績(jī)成功入選。AIoT產(chǎn)業(yè)研究院與物聯(lián)網(wǎng)智庫(kù)堅(jiān)持“從產(chǎn)業(yè)關(guān)聯(lián)廣度和深度觀察
2022-01-27 11:38:49467 
本文實(shí)例講述了 Python 實(shí)現(xiàn) OpenCV 的安裝與使用。分享給大家供 大家參考,具體如下: 由于下一步要開始研究下深度學(xué)習(xí),而深度學(xué)習(xí)領(lǐng)域很多的算法和應(yīng) 用都是用 Python 來(lái)實(shí)現(xiàn)
2023-07-20 11:46:334 使用真實(shí)場(chǎng)景的車載激光點(diǎn)云和兩幅全景圖像進(jìn)行試驗(yàn),驗(yàn)證點(diǎn)-線特征聯(lián)合的位姿解算方法優(yōu)于單純的點(diǎn)特征解算方法。
2023-09-29 08:01:00307 
近日,曙光平臺(tái)軟件產(chǎn)品、曙光存儲(chǔ)、曙光網(wǎng)絡(luò)正式加入中國(guó)信通院《高質(zhì)量數(shù)字化轉(zhuǎn)型產(chǎn)品及服務(wù)全景圖(2023)》。 “全景圖”依托于信通院的“鑄基計(jì)劃”,該計(jì)劃聚焦數(shù)字化轉(zhuǎn)型產(chǎn)品及服務(wù),旨在通過(guò)構(gòu)建完整
2023-09-22 09:51:58402 2021年aiot產(chǎn)業(yè)全景圖譜報(bào)告-電子版(含圖譜)
2023-01-13 09:05:393 2021年中國(guó)5G產(chǎn)業(yè)全景圖譜
2023-01-13 09:05:402 5G射頻前端芯片自主可控全景圖
2023-01-13 09:06:028 12月15日,中國(guó)AIoT產(chǎn)業(yè)年會(huì)暨2023年智能產(chǎn)業(yè)前瞻洞察大典在深圳隆重舉行,智次方研究院在本次大會(huì)上正式發(fā)布了全新升級(jí)版的《2024年中國(guó)AIoT產(chǎn)業(yè)全景圖譜報(bào)告》。ZETA及ZETA聯(lián)盟核心會(huì)員縱行科技、中國(guó)鐵塔、中移物聯(lián)、廣芯微電子入選非蜂窩無(wú)線通信板塊。
2023-12-19 16:03:55184 
2023年接近尾聲,感知芯視界編輯部正在策劃多維度觀察年度產(chǎn)業(yè)發(fā)展專題。本期為大家?guī)?lái)2023年傳感大項(xiàng)目全景圖。
2023-12-26 10:16:31401 3月15日,中國(guó)人工智能產(chǎn)業(yè)發(fā)展聯(lián)盟醫(yī)學(xué)人工智能委員會(huì)2024年第一次工作會(huì)在海口召開,會(huì)上發(fā)布首批《數(shù)字醫(yī)療產(chǎn)品及服務(wù)高質(zhì)量發(fā)展全景圖》與《數(shù)字醫(yī)療產(chǎn)品及服務(wù)高質(zhì)量發(fā)展案例集》,憑借在智慧醫(yī)療領(lǐng)域
2024-03-15 19:23:08868
 電子發(fā)燒友App
電子發(fā)燒友App

















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論